MCS-51單片機(jī)組成CAN通信系統(tǒng)需要擴(kuò)展CAN控制器,本系統(tǒng)采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產(chǎn)的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:00 7026
7026 
CAN總線(xiàn)技術(shù)已在汽車(chē)上廣泛應(yīng)用,隨著新能源車(chē)型以及自動(dòng)駕駛技術(shù)的推廣,總線(xiàn)問(wèn)題也對(duì)汽車(chē)的安全帶來(lái)風(fēng)險(xiǎn)挑戰(zhàn),本文從系統(tǒng)角度對(duì)CAN總線(xiàn)的電氣、EMC、硬件以及軟件等相關(guān)設(shè)計(jì)進(jìn)行梳理,結(jié)合現(xiàn)有總線(xiàn)系統(tǒng)設(shè)計(jì)經(jīng)驗(yàn)進(jìn)行分析與總結(jié)。
2023-11-03 10:17:212036 
于CAN 總線(xiàn)通訊平臺(tái)的設(shè)計(jì)之中。 應(yīng)用方案:使用NI LabVIEW 軟件開(kāi)發(fā)平臺(tái)和PXI 模塊化儀器系統(tǒng)中的CAN 通訊模塊,創(chuàng)建過(guò)濾 識(shí)別J1939 協(xié)議報(bào)文標(biāo)識(shí)符ID 及多幀報(bào)文按協(xié)議
2019-04-08 09:42:13
使用的CAN2517FD有所區(qū)別,僅供參考),主要體現(xiàn)在數(shù)據(jù)鏈路層這一部分。應(yīng)用程序,具體表現(xiàn)在控制器以不同的通信方式、MCP2517FD提供的相應(yīng)指令集和指令集格式對(duì)CAN2517FD的寄存器進(jìn)行讀寫(xiě)操作,進(jìn)而實(shí)現(xiàn)相應(yīng)的功能。具體可參考:CAN總線(xiàn)數(shù)據(jù)鏈路層分析(四) 二、CAN
2021-08-19 06:47:56
—RS232網(wǎng)橋、溫控系統(tǒng)等綜合實(shí)例,讓讀者在學(xué)習(xí)和實(shí)踐中理解CAN總線(xiàn)的精髓。最后一章與讀者分享作者的一些設(shè)計(jì)感悟,并對(duì)網(wǎng)友常見(jiàn)問(wèn)題進(jìn)行解答。更多精彩內(nèi)容:http://www.3532n.com/soft/33/2014/20141230361815.html?1419926322`
2014-12-30 16:01:59
屬于現(xiàn)場(chǎng)總線(xiàn)的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。在這個(gè)網(wǎng)絡(luò)中的各種硬件設(shè)備之間不可避免的需要實(shí)現(xiàn)數(shù)據(jù)傳輸,以實(shí)現(xiàn)產(chǎn)品的功用。適應(yīng)技術(shù)具體要求,CAN總線(xiàn)透明傳輸通訊模塊誕生
2011-09-24 11:57:56
本文默認(rèn)讀者已經(jīng)對(duì)can和stm32的can收發(fā)器有了一定的了解,如Time Quantum、四種工作模式、過(guò)濾器及其配置參數(shù)的意義等。下面直接進(jìn)行開(kāi)始工程(工程中對(duì)調(diào)試串口和時(shí)鐘配置的部分不在贅述
2022-02-28 10:54:21
Classic工具軟件,直接進(jìn)行CAN總線(xiàn)的配置,發(fā)送和接受。用戶(hù)也可以參考我公司提供的DLL動(dòng)態(tài)鏈接庫(kù)編寫(xiě)自己的應(yīng)用軟件,方便開(kāi)發(fā)出CAN系統(tǒng)應(yīng)用軟件產(chǎn)品。在您進(jìn)行二次軟件開(kāi)發(fā)時(shí),完全不需要了解復(fù)雜
2019-02-21 11:37:37
RS232端口的設(shè)備與CAN設(shè)備之間的通訊 。CAN (Controller Area Network)是一種串行總線(xiàn)系統(tǒng),特別適合組建智能工業(yè)設(shè)備網(wǎng)絡(luò)和樓宇自動(dòng)化控制系統(tǒng)。CAN擁有高傳輸速度(高達(dá)
2010-11-16 11:02:05
帶RS232端口的設(shè)備與CAN設(shè)備之間的通訊 。CAN (Controller Area Network)是一種串行總線(xiàn)系統(tǒng),特別適合組建智能工業(yè)設(shè)備網(wǎng)絡(luò)和樓宇自動(dòng)化控制系統(tǒng)。CAN擁有高傳輸速度
2010-11-01 11:05:23
標(biāo)準(zhǔn),采用總線(xiàn)仲裁方式進(jìn)行網(wǎng)絡(luò)管理,實(shí)時(shí)性很高,可保證系統(tǒng)對(duì)事件的響應(yīng),而且通訊可靠性高,CAN主要應(yīng)用于可靠性要求較高的系統(tǒng)中。 1性能與技術(shù)參數(shù)1.1技術(shù)參數(shù)= CAN通道數(shù):兩個(gè)= CAN網(wǎng)絡(luò)通訊
2015-06-12 09:16:08
、CAN數(shù)據(jù)分析的強(qiáng)大工具;同時(shí),具有體積小、即插即用等特點(diǎn),也是便攜式系統(tǒng)用戶(hù)的最佳選擇。USB轉(zhuǎn)CAN接口適配器可利用我公司提供的EmbededConfigForUSB2CAN.exe工具軟件,直接進(jìn)行
2011-05-27 09:13:53
,而且能夠?qū)⒎植荚诓煌攸c(diǎn)的溫度測(cè)控模塊通過(guò)cAN現(xiàn)場(chǎng)總線(xiàn)連接起來(lái),接入PC機(jī)進(jìn)行集中監(jiān)控和管理。本系統(tǒng)采用CAN現(xiàn)場(chǎng)總線(xiàn)進(jìn)行通訊,由于一條cAN總線(xiàn)上的節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制,實(shí)際應(yīng)用則主要取決于總線(xiàn)
2023-09-19 06:45:45
`我們都知道CAN 總線(xiàn)以其可靠性高、成本優(yōu)等特點(diǎn)在汽車(chē)、工業(yè)局域通訊得到廣泛應(yīng)用。但是隨著各種專(zhuān)用控制器的蓬勃發(fā)展,控制功能的需求逐漸復(fù)雜多樣化,隨之帶來(lái)的是各控制器之間的交互也日趨復(fù)雜。CAN
2019-12-19 15:09:07
客車(chē)網(wǎng)絡(luò)控制中CAN/CAN網(wǎng)橋設(shè)計(jì)摘要: 本文以LPC2119 微控制器為核心設(shè)計(jì)了客車(chē)網(wǎng)絡(luò)控制中CAN/CAN 網(wǎng)橋, 實(shí)現(xiàn)了不同CAN 網(wǎng)段連接、報(bào)文過(guò)濾和轉(zhuǎn)發(fā)功能。文中分析和闡述了該網(wǎng)橋
2009-12-01 10:29:53
一種基于PIC32的以太網(wǎng)與CAN總線(xiàn)的網(wǎng)橋設(shè)計(jì)
2021-05-20 06:08:34
思卡爾微控制器、MSCAN的特點(diǎn)和編程、基于XGATE的CAN通信方法、CAN總線(xiàn)的收發(fā)器、CAN總線(xiàn)應(yīng)用中的Bootloader、CAN的標(biāo)定協(xié)議、CAN總線(xiàn)系統(tǒng)設(shè)計(jì)流程等幾個(gè)方面進(jìn)行了詳細(xì)的論述
2018-04-09 22:27:02
CAN數(shù)據(jù)總線(xiàn)系統(tǒng)簡(jiǎn)介
2008-08-04 20:18:50 28
28 本文介紹了一種基于CAN總線(xiàn)的網(wǎng)絡(luò)監(jiān)控系統(tǒng)方案。該方案使用CAN卡和DSP中的CAN模塊作為上下位機(jī)通信接口,研究了CAN通信協(xié)議模型,VC++與CAN卡的通信接口,DSP中CAN模塊通信的數(shù)據(jù)處
2009-06-01 15:32:2227 本文以功率因素動(dòng)態(tài)補(bǔ)償系統(tǒng)為對(duì)象,介紹了CAN 總線(xiàn)技術(shù)在配電自動(dòng)化系統(tǒng)中的一個(gè)應(yīng)用實(shí)例:PC 機(jī)作為上位機(jī),各個(gè)補(bǔ)償系統(tǒng)作為智能節(jié)點(diǎn),通過(guò)CAN 總線(xiàn)進(jìn)行高速通訊。CAN 總線(xiàn)
2009-06-16 10:35:3821 本文研究 CAN 總線(xiàn)在電梯串行通訊中的應(yīng)用。論文對(duì)比RS-485 通訊方式,分析CAN 總線(xiàn)應(yīng)用于電梯串行通訊中的優(yōu)點(diǎn),采用SJA1000 設(shè)計(jì)了CAN 總線(xiàn)通訊硬件,優(yōu)化CAN總線(xiàn)的通信參數(shù),提高
2009-06-25 13:28:0341 鑒于目前基于RS-485通信的監(jiān)控系統(tǒng)的一些問(wèn)題,本文闡述了用微控制器P87C591和現(xiàn)場(chǎng)總線(xiàn)技術(shù)實(shí)現(xiàn)基于CAN總線(xiàn)的監(jiān)控系統(tǒng),還詳細(xì)說(shuō)明了RS-232與CAN總線(xiàn)轉(zhuǎn)換器和基于CAN總線(xiàn)的云臺(tái)控制
2009-07-09 10:06:4736 本文以LPC2119 微控制器為核心設(shè)計(jì)了客車(chē)網(wǎng)絡(luò)控制中CAN/CAN 網(wǎng)橋,實(shí)現(xiàn)了不同CAN 網(wǎng)段連接、報(bào)文過(guò)濾和轉(zhuǎn)發(fā)功能。文中分析和闡述了該網(wǎng)橋的硬件設(shè)計(jì)方案和軟件設(shè)計(jì)過(guò)程,并通過(guò)實(shí)
2009-08-04 14:39:5022 本文討論了CAN網(wǎng)橋的適用性,并在SAE標(biāo)準(zhǔn)參數(shù)的基礎(chǔ)上,使其可用于實(shí)時(shí)控制,同時(shí)研究了利用網(wǎng)橋互連的CAN系統(tǒng)在分布式環(huán)境下的特性。關(guān)鍵詞: 網(wǎng)橋;控制器局域網(wǎng)(CAN)
2009-08-04 15:18:3113 文中提出一種基于CAN 總線(xiàn)的多點(diǎn)式數(shù)據(jù)采集和SPC 系統(tǒng),并介紹了SPC 數(shù)據(jù)采集盒(SPC-Keyboard)硬件原理和CAN總線(xiàn)防沖撞通訊的設(shè)計(jì);引入可標(biāo)定控制線(xiàn)實(shí)現(xiàn)非穩(wěn)態(tài)情況下由于控制線(xiàn)波
2009-08-10 09:12:315 針對(duì)CAN 總線(xiàn)技術(shù)應(yīng)用的蓬勃發(fā)展,本文設(shè)計(jì)了一種基于CAN 總線(xiàn)的工程設(shè)備控制系統(tǒng),對(duì)總線(xiàn)通訊協(xié)議進(jìn)行了設(shè)計(jì)研究,介紹了基于CAN 總線(xiàn)技術(shù)的作業(yè)控制終端、作業(yè)控制器、虛擬
2009-09-03 10:14:0216 研發(fā)了基于CAN 總線(xiàn)的新型機(jī)器人示教盒系統(tǒng),采用ARM 芯片為核心,并在其上運(yùn)行了實(shí)時(shí)操作系統(tǒng)μC/OS-II。設(shè)計(jì)了一套CAN 網(wǎng)絡(luò)通訊協(xié)議,實(shí)現(xiàn)了
2009-09-09 09:35:1323 本文首先簡(jiǎn)要介紹了CAN 總線(xiàn)的技術(shù)特點(diǎn),同時(shí)把針對(duì)電動(dòng)汽車(chē)的特點(diǎn),建立車(chē)身網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)。詳細(xì)的介紹了CAN 通訊協(xié)議準(zhǔn)的拓?fù)浣Y(jié),制定了CAN 總線(xiàn)應(yīng)用層協(xié)議的通訊報(bào)文形式
2010-01-07 14:47:0660 CAN通訊模塊
聯(lián)系 楊迪 15336417867 0531-55508458 QQ:1347978253 htp://www.easyele.cn
產(chǎn)品關(guān)鍵特點(diǎn):
CAN通訊模塊包括了所有模擬和數(shù)字元件、RS232電平變換、CAN-b
2010-07-14 11:00:1869 CAN總線(xiàn)是一種先進(jìn)的現(xiàn)場(chǎng)總線(xiàn),支持分布式控制。本文介紹了一種基于CAN總線(xiàn)的攤鋪機(jī)行走智能控制系統(tǒng),該系統(tǒng)采用集成了CAN總線(xiàn)通訊模塊的EPEC200系列嵌入式控制器和GRAF顯示器為
2010-07-20 15:14:5641 介紹一種基于CAN總線(xiàn)的牽引變電站自動(dòng)化系統(tǒng)通訊規(guī)約的設(shè)計(jì),CAN通訊規(guī)約采用標(biāo)準(zhǔn)幀,報(bào)文采用主動(dòng)發(fā)送和發(fā)送查詢(xún)兩種處理形式。該設(shè)計(jì)在城市輕軌與地鐵牽引變電站中的應(yīng)
2010-12-25 16:26:2539 CAN281x 系列模塊系廣州新悅網(wǎng)絡(luò)設(shè)備有限公司精心設(shè)計(jì)研發(fā)的一款專(zhuān)用于井下作業(yè)環(huán)境的礦用 CAN 音頻傳輸模塊。憑借該模塊,能夠構(gòu)建基于 CAN 總線(xiàn)的應(yīng)用體系,有效實(shí)現(xiàn)廣播喊話(huà)、皮帶打點(diǎn)等
2024-11-27 17:52:14
PC機(jī)并口與現(xiàn)場(chǎng)總線(xiàn)CAN通訊的實(shí)現(xiàn)
以PC機(jī)并口與CAN通訊為例,通過(guò)電路與程序?qū)嵗唧w介紹了通過(guò)并口EPP協(xié)議與CAN轉(zhuǎn)換的實(shí)現(xiàn)。 關(guān)鍵詞:現(xiàn)場(chǎng)
2009-10-16 17:53:322097 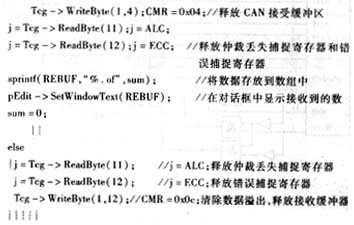
客車(chē)網(wǎng)絡(luò)控制中CAN/CAN網(wǎng)橋設(shè)計(jì)
1 引言控制器局部網(wǎng)CAN[1][2](Controller Area Network)是德國(guó)Robert Bosch公司在20世紀(jì)80年代初為汽車(chē)業(yè)開(kāi)發(fā)的一種車(chē)載專(zhuān)用串行數(shù)據(jù)通信總線(xiàn)
2009-11-10 10:26:39729 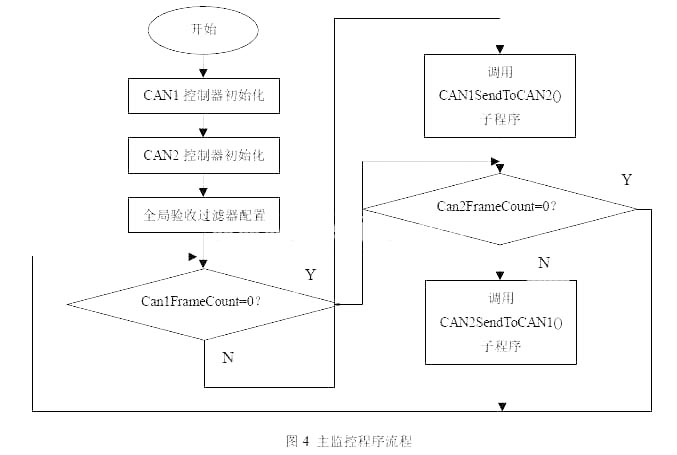
基于DSP的電動(dòng)汽車(chē)CAN總線(xiàn)通訊技術(shù)設(shè)計(jì)
德國(guó)Bosch公司為了解決現(xiàn)代車(chē)輛中眾多的控制和數(shù)據(jù)交換問(wèn)題,開(kāi)發(fā)出一種CAN(Controller AreaNetwork) 現(xiàn)場(chǎng)總線(xiàn)通訊結(jié)構(gòu). CAN
2009-12-23 10:51:431306 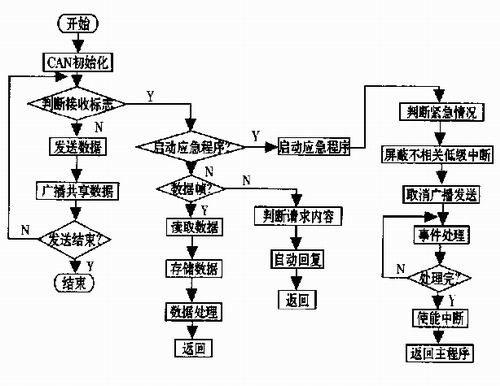
文章對(duì) CAN總線(xiàn) 的技術(shù)特點(diǎn)進(jìn)行了全面介紹,對(duì)CAN總線(xiàn)在磁浮列車(chē)的應(yīng)用方法進(jìn)行了分析,對(duì)CAN總線(xiàn)的軟、硬件進(jìn)行了設(shè)計(jì),最后就磁懸浮列車(chē)CAN總線(xiàn)通訊網(wǎng)進(jìn)行了論述。
2011-07-22 18:05:2046 在分析了RS-485總線(xiàn)與CAN部遲疑不決的異同點(diǎn)后,以PCA82C250型接口電路為例提出了用CAN總線(xiàn)通信物理層接口電路來(lái)替代RS-485總線(xiàn)接口中電路與單片機(jī)直接連接進(jìn)行 通信網(wǎng)絡(luò) 設(shè)計(jì),從而可
2011-09-27 15:40:337351 
文中分析了CAN總線(xiàn)的發(fā)展和汽車(chē)CAN總線(xiàn)技術(shù)的特征,對(duì)CAN總線(xiàn)在汽車(chē)領(lǐng)域的應(yīng)用進(jìn)行了深入的探討。
2011-12-14 14:58:1086 本文設(shè)計(jì)的4路CAN網(wǎng)橋可以延長(zhǎng)CAN傳輸距離,擴(kuò)展CAN通信網(wǎng)絡(luò);同時(shí)具有路由功能,可實(shí)現(xiàn)不同CAN網(wǎng)絡(luò)之間的不同路由、不同通信速率的轉(zhuǎn)換,能夠在大型CAN網(wǎng)絡(luò)中起到關(guān)鍵作用。
2012-06-01 10:26:103830 
基于J1939 協(xié)議的商用車(chē)CAN總線(xiàn),針對(duì)單片機(jī)微控制器MCU 節(jié)點(diǎn)的MCU + CAN 控制器 + CAN 收發(fā)器的CAN 通訊接口,在車(chē)載網(wǎng)絡(luò)控制系統(tǒng)中得到了大量應(yīng)用;而對(duì)整車(chē)道路試驗(yàn)、發(fā)動(dòng)機(jī)
2013-04-15 16:59:227556 
系統(tǒng)設(shè)計(jì)奠定基礎(chǔ)。第4—9章重點(diǎn)講解CAN總線(xiàn)系統(tǒng)硬件設(shè)計(jì)和程序設(shè)計(jì),同時(shí)給出CAN總線(xiàn)自發(fā)收、兩點(diǎn)通信、多點(diǎn)通信、CAN—RS232網(wǎng)橋、溫控系統(tǒng)等綜合實(shí)例,讓讀者在學(xué)習(xí)和實(shí)踐中理解CAN總線(xiàn)的精髓。
2016-04-05 11:17:2318 系統(tǒng)設(shè)計(jì)奠定基礎(chǔ)。第4—9章重點(diǎn)講解CAN總線(xiàn)系統(tǒng)硬件設(shè)計(jì)和程序設(shè)計(jì),同時(shí)給出CAN總線(xiàn)自發(fā)收、兩點(diǎn)通信、多點(diǎn)通信、CAN—RS232網(wǎng)橋、溫控系統(tǒng)等綜合實(shí)例,讓讀者在學(xué)習(xí)和實(shí)踐中理解CAN總線(xiàn)的精髓。
2016-04-05 11:18:2021 接口控制新型的CAN 控制器MCP2515,使慣導(dǎo)系統(tǒng)不僅具備了接入CAN 總線(xiàn)的能力,而且在系統(tǒng)實(shí)現(xiàn)之后,節(jié)點(diǎn)可以根據(jù)現(xiàn)場(chǎng)應(yīng)用提出的新要求進(jìn)行升級(jí),增加了使用的靈活性。目前實(shí)驗(yàn)樣機(jī)已經(jīng)設(shè)計(jì)完成,可以正確地通過(guò)CAN 總線(xiàn)進(jìn)行通訊,達(dá)到了設(shè)計(jì)的要求。
2016-07-13 17:43:300 基于CAN總線(xiàn)的通訊系統(tǒng)軟件框架設(shè)計(jì)
2017-01-24 16:54:2421 CAN總線(xiàn)模塊設(shè)定工具
2017-02-07 18:09:2013 CAN總線(xiàn)是一種多主方式的串行通訊總線(xiàn),基本設(shè)計(jì)規(guī)范要求有高的位速率,高抗電子干擾性,并且能夠檢測(cè)出產(chǎn)生的任何錯(cuò)誤。CAN總線(xiàn)可以應(yīng)用于汽車(chē)電控制系統(tǒng)、電梯控制系統(tǒng)、安全監(jiān)測(cè)系統(tǒng)、醫(yī)療儀器、紡織機(jī)械、船舶運(yùn)輸?shù)阮I(lǐng)域。
2017-08-28 14:02:120 的通信而直接進(jìn)行應(yīng)用程序的編寫(xiě),LIN總線(xiàn)沒(méi)有專(zhuān)門(mén)的協(xié)議驅(qū)動(dòng)器,一般需要在SCI模塊的基礎(chǔ)上用軟件實(shí)現(xiàn)其底層通信。
2017-09-07 10:27:0910 1 引言 CANopen是一個(gè)開(kāi)放的、標(biāo)準(zhǔn)化的應(yīng)用層協(xié)議,在各種控制系統(tǒng)中得到了廣泛的應(yīng)用。依靠CANopen協(xié)議的支持,可以對(duì)不同CAN廠商的設(shè)備通過(guò)總線(xiàn)進(jìn)行實(shí)時(shí)通訊。 本文針對(duì)自主研發(fā)的全數(shù)
2017-10-31 11:00:5818 不同元件之間的通信,以此取代昂貴而笨重的配電線(xiàn)束。該協(xié)議的健壯性使其用途延伸到其他自動(dòng)化和工業(yè)應(yīng)用。CAN協(xié)議的特性包括完整性的串行數(shù)據(jù)通訊、提供實(shí)時(shí)支持、傳輸速率高達(dá)1Mb/s、同時(shí)具有11位的尋址以及檢錯(cuò)能力。 CAN系統(tǒng)組成 CAN總線(xiàn)用戶(hù)接口簡(jiǎn)單,編程方便。
2017-11-09 19:33:5232579 
在電子產(chǎn)品的各種通訊方式中,CAN(Controller Area Network)總線(xiàn)以其高可靠性、實(shí)時(shí)性、傳輸距離遠(yuǎn)的特點(diǎn)得到廣泛的應(yīng)用,已經(jīng)成為許多高檔汽車(chē)(如奔馳、寶馬等)車(chē)電系統(tǒng)的總線(xiàn)標(biāo)準(zhǔn)
2018-04-10 11:37:009403 
汽車(chē)控制功能的網(wǎng)絡(luò)化、智能化已經(jīng)成為現(xiàn)代汽車(chē)工業(yè)發(fā)展的必然趨勢(shì),由于 CAN 總線(xiàn)通訊協(xié)議廢除了傳統(tǒng)的站地址編碼,使得 CAN 網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)數(shù)量將不受限制,且實(shí)時(shí)性好,通訊速率高,因此被廣泛用于汽車(chē)電子控制系統(tǒng)上。
2018-05-07 09:57:4314024 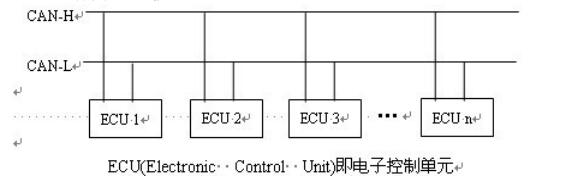
總線(xiàn),在通訊上也會(huì)受到部分干擾,所以改造CAN總線(xiàn)迫在眉睫。本文首先介紹了什么是光纖及can總線(xiàn),其次介紹了為什么要用光纖CAN轉(zhuǎn)換器,最后闡述了基于光纖轉(zhuǎn)CAN模塊的CAN總線(xiàn)通信改造步驟詳解。
2018-05-07 17:09:358383 GCAN-201 模塊(CAN232/485MB)是集成 1 路標(biāo)準(zhǔn) CAN-bus 接口、1 路標(biāo)準(zhǔn)串行接口(RS-232/RS-485)的工業(yè)級(jí) CAN-bus 與串行總線(xiàn)通訊連接器(網(wǎng)橋
2018-12-15 11:02:119571 用戶(hù)在使用CAN總線(xiàn)通信時(shí),一般只需要接CAN_H和CAN_L兩根導(dǎo)線(xiàn)。但是導(dǎo)線(xiàn)畢竟都多少有些內(nèi)阻,因此在使用導(dǎo)線(xiàn)傳輸信號(hào)時(shí),肯定會(huì)存在一定的損耗,而CAN總線(xiàn)標(biāo)準(zhǔn)中也大概介紹了在不同波特率下CAN
2018-12-23 10:31:597646 本文提出的CAN總線(xiàn)工程車(chē)輛遠(yuǎn)程監(jiān)測(cè)系統(tǒng),通過(guò)車(chē)載電子控制裝置ECU的CAN總線(xiàn)獲取車(chē)輛運(yùn)行信息,并利用GPRS無(wú)線(xiàn)網(wǎng)絡(luò)通信手段對(duì)車(chē)輛進(jìn)行遠(yuǎn)程監(jiān)控及調(diào)度管理。
2019-10-23 17:14:452424 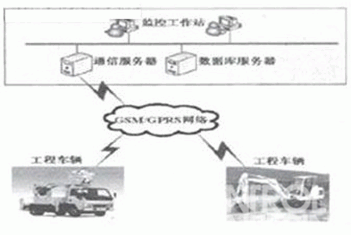
can總線(xiàn)模塊是一個(gè)比較模糊的概念,但凡是和CAN總線(xiàn)沾邊,應(yīng)用CAN總線(xiàn)進(jìn)行通訊的設(shè)備,我們其實(shí)都可以稱(chēng)其為CAN總線(xiàn)模塊。
2020-09-18 11:26:545687 CAN網(wǎng)橋(Bridge)是一個(gè)智能的中繼器。使用CAN網(wǎng)橋對(duì)設(shè)備進(jìn)行互連,克服了CAN總線(xiàn)結(jié)點(diǎn)個(gè)數(shù)及通信距離的物理限制,能有效擴(kuò)充CAN網(wǎng)絡(luò)的結(jié)點(diǎn)總數(shù),延長(zhǎng)通信距離。今天,下面為大家詳細(xì)介紹下CAN總線(xiàn)中繼器以及CAN網(wǎng)橋產(chǎn)品性能與技術(shù)指標(biāo),一起來(lái)看看吧!
2020-12-19 09:46:495692 接口控制新型的CAN 控制器MCP2515,使慣導(dǎo)系統(tǒng)不僅具備了接入CAN 總線(xiàn)的能力,而且在系統(tǒng)實(shí)現(xiàn)之后,節(jié)點(diǎn)可以根據(jù)現(xiàn)場(chǎng)應(yīng)用提出的新要求進(jìn)行升級(jí),增加了使用的靈活性。目前實(shí)驗(yàn)樣機(jī)已經(jīng)設(shè)計(jì)完成,可以正確地通過(guò)CAN 總線(xiàn)進(jìn)行通訊,達(dá)到了設(shè)計(jì)的要求。
2021-01-27 15:52:0017 紹了基于cAN總線(xiàn)的分布式溫度測(cè)控系統(tǒng),利用cAN總線(xiàn)將各溫度采集控制模塊與上位計(jì)算機(jī)連接起來(lái),使系統(tǒng)不僅具有基本的溫度測(cè)控的功能,還可以進(jìn)行集中監(jiān)控,參數(shù)設(shè)置,數(shù)據(jù)管理,報(bào)表打印等操作。文中重點(diǎn)討論了它的硬件構(gòu)成及軟件設(shè)計(jì)。
2021-04-19 15:41:2933 結(jié)合汽車(chē)技術(shù)發(fā)展對(duì)傳統(tǒng)布線(xiàn)方法中存在的問(wèn)題和CAN總線(xiàn)系統(tǒng)的使用進(jìn)行了介紹,總結(jié)了CAN總線(xiàn)系統(tǒng)的優(yōu)點(diǎn)。
2021-04-19 17:31:3033 基于S3C2410的CAN總線(xiàn)通訊設(shè)計(jì)與開(kāi)發(fā)說(shuō)明。
2021-04-20 10:28:3117 麥可科技研發(fā)的CAN總線(xiàn)接口模塊、擁有2/4路獨(dú)立CAN通道。 板載的120歐姆終端電阻,用戶(hù)可以根據(jù)使用情況,用跳線(xiàn)選擇,當(dāng)節(jié)點(diǎn)為端節(jié)點(diǎn)時(shí)應(yīng)連接該電阻。
2021-04-20 10:32:5523 CAN通訊設(shè)計(jì)DSP/MCU的CAN接口是指芯片外設(shè)中的CAN總線(xiàn)控制器,其輸出電平為T(mén)TL規(guī)格,如果直接將兩塊芯片的CANRX、CANTX引腳連接,無(wú)法實(shí)現(xiàn)CAN通訊。SAJ1000
2021-12-05 17:36:0842 ),是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線(xiàn),它可以使用雙絞線(xiàn)來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一。CAN協(xié)議用于汽車(chē)中各種不同元件之間的通信,用來(lái)取代昂貴而笨重的配電線(xiàn)束。CAN協(xié)議的使用廣泛這一特點(diǎn)使其很快延伸到自動(dòng)化控制以及工業(yè)領(lǐng)域中。 CAN協(xié)議的特性包括完
2022-01-15 17:04:486523 can總線(xiàn)通訊卡,一般是指我們平時(shí)進(jìn)行汽車(chē)CAN總線(xiàn)調(diào)試的USBCAN分析儀,它是我們進(jìn)行目標(biāo)CAN設(shè)備CAN總線(xiàn)研究的基礎(chǔ)工具。根據(jù)設(shè)計(jì)的不同,其可分為單通道版本,雙通道版本以及多通道版本
2022-01-27 09:48:274425 《CAN總線(xiàn)技術(shù)與應(yīng)用系統(tǒng)設(shè)計(jì)》pdf
2022-02-07 18:06:370 CAN總線(xiàn)也叫控制器局域網(wǎng),是一種工業(yè)用途的通訊總線(xiàn),其采用差分電壓信號(hào)傳輸信息,具有傳輸速度快,連接節(jié)點(diǎn)多,抗干擾能力強(qiáng)等特點(diǎn)。目前,幾乎所有的機(jī)動(dòng)車(chē)都在使用CAN總線(xiàn)作為通訊系統(tǒng),除交通領(lǐng)域以外,CAN總線(xiàn)也在工業(yè)自動(dòng)化上大放異彩。可以說(shuō),CAN總線(xiàn)是一種非常具有性?xún)r(jià)比,非常有發(fā)展前景的工業(yè)總線(xiàn)。
2022-03-09 17:42:2814923 can無(wú)線(xiàn)通訊模塊泛指各種能夠進(jìn)行無(wú)線(xiàn)通訊的CAN轉(zhuǎn)換網(wǎng)關(guān),常見(jiàn)的有CAN轉(zhuǎn)WiFi網(wǎng)關(guān),CAN轉(zhuǎn)4G網(wǎng)關(guān)以及CAN轉(zhuǎn)藍(lán)牙網(wǎng)關(guān)等等。那么,什么時(shí)候我們會(huì)用到這些設(shè)備呢?由于以上三種工具有不同的特性,所以我們分開(kāi)來(lái)說(shuō)一下。
2022-03-16 13:33:335531 PROFINET IO 通信不支持跨網(wǎng)段的實(shí)時(shí)通信,此外兩個(gè) PROFINET IO 控制器如果在其中沒(méi)有智能設(shè)備情況下通常也無(wú)法直接進(jìn)行 PROFINET IO 通信。
2023-02-20 10:32:324831 CAN的目的是用多點(diǎn)、串行數(shù)字通訊技術(shù)取代常規(guī)的直接導(dǎo)線(xiàn)信號(hào)連接,可以節(jié)省大量車(chē)載設(shè)備的電纜布線(xiàn)。由于CAN總線(xiàn)芯片可靠性高、協(xié)議精練、價(jià)格低、貨源廣泛,因而在工業(yè)測(cè)控領(lǐng)域也獲得廣泛應(yīng)用。但是,工業(yè)現(xiàn)場(chǎng)環(huán)境惡劣,電磁干擾較為嚴(yán)重,如何保證CAN總線(xiàn)通訊的可靠性尤為重要。
2023-05-04 15:03:544457 
節(jié)點(diǎn)的硬件接口電路。基于對(duì)CAN 總線(xiàn)控制器的功能分析, 并應(yīng)用Verilog語(yǔ)言進(jìn)行軟件設(shè)計(jì), 從而實(shí)現(xiàn)CAN節(jié)點(diǎn)之間的通信功能。 0 引言 CAN 總線(xiàn)允許高達(dá)1M bit /s通訊速率, 支持多主通訊模式, 有高抗電磁干擾性而且能夠檢測(cè)出通信過(guò)程中產(chǎn)生的任何錯(cuò)誤, 已被廣泛應(yīng)用到各自動(dòng)
2023-06-18 11:15:014211 CAN總線(xiàn)系統(tǒng)為什么在汽車(chē)中廣泛使用?摘要:CAN總線(xiàn)系統(tǒng)應(yīng)用于工業(yè)自動(dòng)化、樓宇安防、消防監(jiān)控等領(lǐng)域,其中使用最為廣泛的莫過(guò)于汽車(chē)了。那么今天就來(lái)說(shuō)說(shuō)CAN總線(xiàn)系統(tǒng)為什么在汽車(chē)中廣泛使用?CAN總線(xiàn)
2022-04-22 11:17:173997 
了。這次調(diào)試需要深入測(cè)試CAN接口的通訊過(guò)程,正好把之前的對(duì)CAN的認(rèn)識(shí)再?gòu)?fù)習(xí)深化一下。之所以采用CAN總線(xiàn),是因?yàn)樗恍枰獌筛p絞線(xiàn)就可以連接多個(gè)通訊節(jié)點(diǎn),并且可
2022-05-31 00:00:002207 
帶有CAN總線(xiàn)的工業(yè)電腦是一種堅(jiān)固耐用的工業(yè)級(jí)計(jì)算解決方案,可配置CAN總線(xiàn)模塊。該模塊與CAN2.0A/B兼容,允許系統(tǒng)接入車(chē)輛的CAN總線(xiàn)網(wǎng)絡(luò)、車(chē)輛的中樞神經(jīng)系統(tǒng),將車(chē)輛的各種電氣組件相互連接并
2022-06-21 16:07:031983 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此遠(yuǎn)創(chuàng)智控YC-ECT-CAN
2023-07-06 09:55:581674 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-07-31 09:07:291072 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-10-31 18:30:001232 
,由于存在多個(gè)設(shè)備,信號(hào)的傳輸路徑比較復(fù)雜,因此需要采取措施來(lái)保證信號(hào)質(zhì)量和通訊可靠性。
加裝120Ω終端電阻是一種常用的措施。
在實(shí)際應(yīng)用中,可根據(jù)總線(xiàn)長(zhǎng)度,負(fù)載參數(shù)進(jìn)行設(shè)置,以確保通訊的穩(wěn)定性和可靠性。
2023-08-08 15:32:165545 
不同設(shè)備之間進(jìn)行交流。CAN總線(xiàn)的負(fù)載率是指在給定時(shí)間內(nèi),CAN總線(xiàn)所采用的通信參數(shù)與總線(xiàn)容量之比。由于CAN總線(xiàn)負(fù)載率是影響CAN總線(xiàn)性能的重要因素之一,因此在CAN總線(xiàn)應(yīng)用中,需要特別注意CAN總線(xiàn)負(fù)載率問(wèn)題,以確保系統(tǒng)正常運(yùn)行。 在CAN總線(xiàn)應(yīng)用中
2023-09-07 15:05:414877 CAN總線(xiàn)通常由兩根線(xiàn)組成:CAN-High(CAN-H)和CAN-Low(CAN-L),也稱(chēng)為CAN-H線(xiàn)和CAN-L線(xiàn),這兩根線(xiàn)呈對(duì)稱(chēng)排列。CAN總線(xiàn)使用差分信號(hào)的方式進(jìn)行通信,通過(guò)在CAN-H和CAN-L線(xiàn)之間傳輸電壓差來(lái)表示數(shù)據(jù)和控制信號(hào)。
2023-09-12 14:59:2914168 can總線(xiàn)為什么要用雙絞線(xiàn)?can總線(xiàn)不用雙絞線(xiàn)可以嗎? CAN總線(xiàn)是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車(chē)、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線(xiàn)采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:057576 電子發(fā)燒友網(wǎng)站提供《基于CAN總線(xiàn)的自動(dòng)化儀表的通訊模塊的設(shè)計(jì)方法.pdf》資料免費(fèi)下載
2023-10-18 09:26:400 電子發(fā)燒友網(wǎng)站提供《順源科技新產(chǎn)品:內(nèi)置隔離電源的CAN總線(xiàn)通訊接口信號(hào)隔離模塊.doc》資料免費(fèi)下載
2022-02-25 13:29:190 CAN總線(xiàn)通訊協(xié)議由德國(guó)博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線(xiàn)通訊協(xié)議的量產(chǎn)車(chē)型是1991年的奔馳S級(jí)轎車(chē),至今CAN總線(xiàn)依舊是車(chē)內(nèi)主要的通訊總線(xiàn)。隨著汽車(chē)電子智能化加速,CAN總線(xiàn)也開(kāi)始
2023-12-21 14:03:455391 
CAN總線(xiàn)系統(tǒng)需要使用中繼器進(jìn)行信號(hào)增強(qiáng)和延長(zhǎng)? CAN總線(xiàn)系統(tǒng)是是一種用于微控制器和設(shè)備之間通信的串行總線(xiàn)系統(tǒng)。作為一種主要用于汽車(chē)和工業(yè)領(lǐng)域的通信協(xié)議,CAN總線(xiàn)系統(tǒng)需要使用中繼器進(jìn)行信號(hào)增強(qiáng)
2024-01-31 13:46:431840 高速CAN總線(xiàn)和低速CAN總線(xiàn)的特性 高速CAN總線(xiàn)和低速CAN總線(xiàn)是兩種常見(jiàn)的CAN總線(xiàn)類(lèi)型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:014360 CAN總線(xiàn)是一種小規(guī)模網(wǎng)絡(luò)標(biāo)準(zhǔn),最初設(shè)計(jì)用于汽車(chē)和公交車(chē),如今在機(jī)器人和傳感器網(wǎng)絡(luò)等領(lǐng)域得到廣泛應(yīng)用,以滿(mǎn)足比I2C更強(qiáng)大的范圍和尋址需求,并適用于無(wú)法使用以太網(wǎng)進(jìn)行通信的場(chǎng)景。通過(guò)采用雙線(xiàn)差分傳輸
2024-02-19 12:47:191127 
CAN總線(xiàn)隔離模塊是一種用于保護(hù)CAN總線(xiàn)通信系統(tǒng)的電子設(shè)備,它通過(guò)在CAN總線(xiàn)和CAN節(jié)點(diǎn)之間增加一層隔離層,來(lái)防止電氣干擾、電壓沖擊和故障傳播等問(wèn)題,從而確保CAN總線(xiàn)系統(tǒng)的穩(wěn)定運(yùn)行和數(shù)
2024-06-16 10:32:503824 使用CAN總線(xiàn)進(jìn)行汽車(chē)電控系統(tǒng)設(shè)計(jì)是一個(gè)復(fù)雜但高效的過(guò)程,它充分利用了CAN總線(xiàn)的分布式控制、實(shí)時(shí)通信和高可靠性等特點(diǎn)。以下是對(duì)該設(shè)計(jì)過(guò)程的介紹: 一、CAN總線(xiàn)概述 CAN(Controller
2024-11-12 09:58:091398 開(kāi)源硬件平臺(tái),通過(guò)添加CAN總線(xiàn)模塊,也可以實(shí)現(xiàn)CAN通信。 硬件準(zhǔn)備 Arduino開(kāi)發(fā)板 :可以選擇Arduino Uno、Mega等型號(hào)。 CAN總線(xiàn)模塊 :如MCP2515或MCP2562,這些模塊
2024-11-12 10:09:173772 于工業(yè)自動(dòng)化、醫(yī)療設(shè)備、船舶系統(tǒng)等領(lǐng)域。 CAN總線(xiàn)通信原理介紹 1. CAN總線(xiàn)概述 CAN總線(xiàn)是一種多主控制的串行通信協(xié)議,它允許多個(gè)設(shè)備共享同一通信線(xiàn)路,實(shí)現(xiàn)數(shù)據(jù)的實(shí)時(shí)傳輸。CAN協(xié)議定義了物理層、數(shù)據(jù)鏈路層和應(yīng)用層,其中數(shù)據(jù)鏈路層是CAN協(xié)議的核心。 2. CAN總線(xiàn)的基本組成 物理
2024-11-21 10:21:513467 使用CAN總線(xiàn)進(jìn)行數(shù)據(jù)采集的方法通常涉及一系列步驟,這些步驟確保了數(shù)據(jù)的準(zhǔn)確采集、處理和存儲(chǔ)。以下是一個(gè)詳細(xì)的方法指南: 一、了解CAN總線(xiàn)系統(tǒng) 首先,需要對(duì)CAN總線(xiàn)系統(tǒng)有一定的了解。CAN總線(xiàn)
2024-12-20 18:18:143725 CAN轉(zhuǎn)CAN中繼網(wǎng)橋在工業(yè)通信中常用于擴(kuò)展網(wǎng)絡(luò)距離、隔離干擾或連接不同波特率的CAN網(wǎng)絡(luò)。
2025-04-11 17:17:46953
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論