USB5V供電,功耗較低;尺寸小,為緊湊的工業(yè)應(yīng)用節(jié)約寶貴的空間。 Pocket-RIO能夠幫助工程師和學(xué)生在較短的時間內(nèi)完成復(fù)雜的FPGA項目應(yīng)用,特別適合運動控制,機器人,機電一體化,測控等應(yīng)用領(lǐng)域。詳情請關(guān)注芒果樹技術(shù)獲取更多!mangotree.cn`
2016-10-13 15:20:04
USB5V供電,功耗較低;尺寸小,為緊湊的工業(yè)應(yīng)用節(jié)約寶貴的空間。 Pocket-RIO能夠幫助工程師和學(xué)生在較短的時間內(nèi)完成復(fù)雜的FPGA項目應(yīng)用,特別適合運動控制,機器人,機電一體化,測控等應(yīng)用領(lǐng)域。詳情請關(guān)注芒果樹技術(shù)獲取更多!mangotree.cn`
2016-10-14 09:52:59
,該軟件還包含能夠輕松在實時嵌入式硬件上實現(xiàn)的機器人IP,用于避障、動力學(xué)和搜尋算法,幫助自主系統(tǒng)或機器人選擇最佳路徑。 “在過去23年里,LabVIEW開發(fā)環(huán)境的發(fā)展非常顯著。LabVIEW從最初
2019-05-21 07:40:08
的時間并分階段完成。階段-1系統(tǒng)由以下元件組成:HILS(硬件在環(huán)仿真)引擎、機器人和圖像處理系統(tǒng)。開發(fā)HILS引擎的NI HILS系統(tǒng)由PXI(用于儀器的PCI擴展)產(chǎn)品和RIO(可重配置的I/O
2023-11-29 18:28:37
LabVIEW開發(fā)六軸工業(yè)機器人運動控制系統(tǒng)
本項目開發(fā)了一個高效的工業(yè)機器人控制系統(tǒng),重點關(guān)注于運動學(xué)算法和軌跡規(guī)劃算法的實現(xiàn)和測試。LabVIEW作為一個關(guān)鍵技術(shù),在項目中扮演了核心角色
2023-12-21 20:03:18
初次使用 NI MyRIO控制器開發(fā)四輪全向移動機器人,由四個全向輪和直流電機與增量式編碼器和NI 9001控制器組成,安裝了紅外距離和光電傳感器。驅(qū)動板由官方提供的H橋驅(qū)動板。NI 9001由
2016-08-21 12:20:22
自動或半自動機器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提供了多種嵌入式硬件平臺,以滿足復(fù)雜系統(tǒng)的需求。從尖端的機器人研究項目直至高級行業(yè)應(yīng)用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
論壇里下了個labview機器人仿真程序。。。因為課程需要(以前沒有接觸過labview)想改某些參數(shù)就好。把本來wrl文件改成了我們畫的stl文件。可是顯示類沖突。怎么辦呀。求大神指教。
2017-05-10 20:16:21
最近要學(xué)labview里的機器人模塊,但是找不到什么入門資料,大家有沒有啥資料推薦推薦的啊。。。
2012-11-08 21:47:14
我現(xiàn)在做這個機器人的路徑規(guī)劃,有一個人工勢場的算法,已經(jīng)用C實現(xiàn)算法,請問一下能否用這個labview仿真,就是給定一些起始點,終點,還有這個障礙物的坐標(biāo),中間是這個算法計算出來的一些點,能夠在執(zhí)行算法的時候用labview描出這些點,最終形成一條規(guī)劃好的路徑。
2015-04-22 16:04:32
用labview如何編寫六足機器人三足步態(tài)的程序?主要的依據(jù)和原理是什么呢?求指教!
2016-08-04 19:21:05
labview接收運動的巡檢機器人采集回來的數(shù)據(jù),距離比較長,感覺用藍牙不太好,求助
2015-05-19 14:45:49
有使用labview控制移動機器人的大佬嘛,在下需要一些myrio資料的講解,希望各位伸出援助之手,拉小弟一把,感激不盡。
2019-03-21 15:12:09
請各位大神指導(dǎo),移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
機器人控制labview上位機程序
2014-03-21 11:48:15
移動機器人有沒有推薦的MCU,萌新求大佬幫助
2020-11-03 11:41:09
輔助作業(yè)流程會影響到靈活加工的效果。如果不想讓測量系統(tǒng)變成阻礙生產(chǎn)效率的因素,那就必須要使測量系統(tǒng)滿足持續(xù)變化的加工要求。采用機器人輔助的測量系統(tǒng)即可達到這些要求。 通過結(jié)合使用工業(yè)機器人
2015-02-11 17:15:03
labview 視覺機器人抓取工件 CCD相機的二維坐標(biāo)系的建立?希望分享,謝謝
2017-08-18 20:53:37
機器人制作嵌入式機器人學(xué)——基于嵌入式系統(tǒng)的移動機器人設(shè)計與應(yīng)用智能電子創(chuàng)新制作-機器人制作入門LabVIEW與機器人科技創(chuàng)新活動BeagleBone 機器人開發(fā)指南玩具機器人制作機器人結(jié)構(gòu)與程序設(shè)計無線
2015-02-22 07:34:56
機器人接觸式物體探測技術(shù)電路設(shè)計
2020-03-02 11:06:28
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應(yīng)用有哪些?
2021-07-05 06:48:21
機器人的移動通常是從管理機器人總體任務(wù)進度的中央處理器發(fā)出位置變化請求時開始的。導(dǎo)航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
有人會用labview調(diào)用python嗎,或者有其他方法能實現(xiàn)這個要求?我在labview做了一個磁場發(fā)生的程序,驅(qū)動磁機器人運動,而且我這個機器人是繞著一個向量旋轉(zhuǎn)向前的,就輸入幅值頻率那些就可以
2022-11-18 16:21:25
老師給我們3個人分別發(fā)了msp430 launchpad、DSPc200 launchpad、51開發(fā)板,要求我們設(shè)計一塊公用的板子,通過接插方式分別實現(xiàn)對機器人的控制。也就是說當(dāng)430插在
2014-04-21 10:04:34
移動平臺 美國卓克索大學(xué)(DrexelUniversity)團隊的步行機器人“Hubo”,采用開放性平臺架構(gòu)方便合作開發(fā)者利用(編按:Hubo是韓國開發(fā)設(shè)計的機器人) 美國NASA所屬噴射推進
2013-07-15 14:48:19
車米將在今年上市的產(chǎn)品,是一個機器人。目前來說,他還是一個小孩子初級機器人。為什么這么說呢?因為到目前為止,只實現(xiàn)了一些小的功能。但真正要做的是要將ADAS、人工智能集成進去,再與對車的控制打通
2016-04-21 14:55:56
控制和通信 IC 的發(fā)展在實現(xiàn)下一代的機器人中起到重要作用。然而,這些復(fù)雜的現(xiàn)代機器人的核心是許多新的、小型化和低成本的傳感技術(shù)的出現(xiàn)與融合。對實現(xiàn)下一代機器人至關(guān)重要的幾項關(guān)鍵傳感器技術(shù)包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環(huán)境傳感器和電源管理傳感器。
2019-07-31 07:46:31
C51步行機器人 內(nèi)含教程和相關(guān)程序和器件清單
2013-07-05 18:12:38
把LEGO組件加入到Labview中,通過Labview編程實現(xiàn)魔方復(fù)原的LEGO魔方機器人
2018-05-09 14:50:00
求大神指導(dǎo)怎么做多足機器人的行走的動畫演示!!!
2017-04-23 11:36:56
NI-LabVIEW-Robotics-機器人運用
2017-09-26 09:46:22
有沒有人知道什么是拖拽式機器人,其具體定義是什么
2016-03-11 09:20:00
可穿戴型下肢助力機器人是輔助型康復(fù)機器人的一種,是一種幫助人們擴展下肢運動能力的助力裝置,其基本原理是在基于人體運動行為意識信息的基礎(chǔ)上,由安裝在腿部關(guān)節(jié)(髖關(guān)節(jié)及膝關(guān)節(jié))處的伺服電機驅(qū)動關(guān)節(jié)運動
2020-04-27 08:04:05
請問哪位大神做過真空吸附式或者非磁鐵式的爬墻機器人,能否提供一些經(jīng)驗或者資料
2015-03-26 10:43:20
本文以6- PPPS并聯(lián)機器人為控制對象,以NI公司的系列軟硬件產(chǎn)品為基礎(chǔ),依托國家自然基金(No. 30770538)的支持,快速開發(fā)了此并聯(lián)機器人的開放式數(shù)字控制系統(tǒng)。
2021-05-12 06:38:22
信號。這樣,我們就能夠把將蒼蠅作為一個活的傳感器,并嵌入到一個科技系統(tǒng)中。 我們開發(fā)了一個試驗。在試驗中,我們把一只果蠅用繩拴住,通過果蠅的動作來控制伊普克(e-puck)機器人。該機器人是一個小型
2019-04-30 09:40:04
,節(jié)約原材料消耗以及降低生產(chǎn)成本,有著十分重要的意義,正在日益改變著人類的生產(chǎn)和生活方式。工業(yè)機器人已經(jīng)廣泛應(yīng)用于汽車及汽車零部件制造業(yè)、機械加工行業(yè)、電子電氣行業(yè)、橡膠及塑料工業(yè)、食品工業(yè)、物流等諸多
2015-09-02 14:03:18
本帖最后由 eehome 于 2013-1-5 10:08 編輯
四足步行機器人的彎道行走
2012-08-12 09:53:57
用CompactRIO和LabVIEW開發(fā)下一代機器人控制系統(tǒng)Author(s):Bill Miller - FIRST Frank Merrick - FIRSTKate Pilotte
2019-05-15 09:40:01
本文概述了上海交通大學(xué)機器人研究所研制的新型遙控移動式排爆機器人PBJ-1的嵌入式控制系統(tǒng)固件的情況。利用嵌入式系統(tǒng)技術(shù)開發(fā)適合排爆等各類遙控地面移動機器人使用的嵌入式控制系統(tǒng)能夠解決上述種種矛盾。
2021-06-07 06:11:02
樹莓派和其他機器人的控制器有何不同?如何使用樹莓派開發(fā)智能機器人控制系統(tǒng)?
2021-12-23 06:55:02
文末下載完整資料??????????????????????摘要??機器人是一門涉及計算機科學(xué)、機械、電子、自動控制、人工智能等多個方面的科學(xué)。??步行者機器人是一臺在四連桿機構(gòu)的基礎(chǔ)上而設(shè)計出來
2022-03-02 06:23:10
CompactRIO嵌入式硬件平臺用于FIRST項目中的機器人自主控制系統(tǒng)開發(fā);TORC科技公司從傳統(tǒng)的編程工具轉(zhuǎn)而使用NI LabVIEW軟件平臺設(shè)計其復(fù)雜的自主系統(tǒng),其CEO Michael Fleming
2019-07-31 07:17:18
各位大神,現(xiàn)在小弟想用LabVIEW控制安川機器人,可是通過調(diào)用motocom32的DLL不能和機器人通信,聽說LabVIEW不能二次開發(fā)安川機器人,請問有熟悉安川機器人的高手指點一二,不勝感激!
2014-11-10 12:29:06
作為一個技術(shù)宅,我對機器人和單片機很感興趣。在這里我把自己做過的一款履帶式移動機器人的資料分享給大家。歡迎大家吐槽!同時也希望對做機器人的同學(xué)有幫助。 該機器人采用STM32F103RCT6為主
2017-07-27 18:28:18
`你曾經(jīng)嘗試以單手打開瓶蓋或信封封口嗎?或是其他需要用兩只手來做的事?現(xiàn)在,如果你穿戴上美國麻省理工學(xué)院(MIT)開發(fā)的新式機器手腕,這些工作要以單手來做,可說是輕而易舉。盡管這款可穿戴式機器人仍
2014-07-29 11:11:37
項目和課程;2010年起,鷗鵬智能又進一步開發(fā)了面向中小學(xué)信息技術(shù)、通用技術(shù)和科學(xué)課程的機器人輔助教學(xué)解決方案,以及面向工業(yè)自動化應(yīng)用的工業(yè)機器人和智能機器人創(chuàng)新課程解決方案。鷗鵬機器人,打開智慧之門
2016-03-30 11:33:54
關(guān)于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
機甲大師機器人的軟件架構(gòu)設(shè)計如何實現(xiàn)?
2021-11-22 07:55:21
現(xiàn)在做畢業(yè)設(shè)計,是基于labview的挖掘機器人軌跡規(guī)劃與控制,就是用labview來實現(xiàn)軌跡規(guī)劃的編程,請教各位,這容易實現(xiàn)嗎?該從哪入手啊?謝謝了!
2013-04-01 14:32:01
想用Labview做機器視覺,怎樣將Labview通過視覺算出的工件的偏移量以及偏移角度的值通過Profinet網(wǎng)絡(luò)賦于ABB機器人里的變量(變量類型:num)?
2016-10-31 13:15:38
隨著人工智能技術(shù)的發(fā)展,機器人已經(jīng)開始接管人類的部分工作,例如快遞、工廠作業(yè)、餐廳服務(wù)員甚至媒體編輯---紐約時報就聘請了一位機器人做總編。未來,機器人可以介入半導(dǎo)體設(shè)計開發(fā)嗎?例如,機器人可以進行FPGA開發(fā)嗎?
2019-10-10 06:33:18
本教程對LabVIEW機器人模塊軟件自帶的機器人算法進行介紹。從傳感器直至路徑規(guī)劃,您都可以使用這個產(chǎn)品來設(shè)計新一代的復(fù)雜的自動化系統(tǒng)。
LabVIEW機器人模塊帶有全新的
2010-03-12 10:34:42 77
77 March-用于機器人的RIO嵌入式控制平臺:自動或半自動機器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提
2010-03-12 10:47:0417 多種模式輔助提升主動運動功能的兒童下肢外骨骼機器人,適用于下肢步行功能障礙兒童的康復(fù)訓(xùn)練。安全舒適的人機交互設(shè)計,安全穩(wěn)定多種訓(xùn)練模式輔助提升主動運動功能重復(fù)高頻的步行訓(xùn)練,提升步行能力功能特點
2023-09-20 17:38:02
產(chǎn)品介紹 ABB機器人產(chǎn)品線豐富,包括?多關(guān)節(jié)機器人、?協(xié)作機器人、?噴涂機器人、?SCARA機器人以及?自主移動機器人(?AMR)等?多關(guān)節(jié)機器人?:ABB的多關(guān)節(jié)機器人是六軸關(guān)節(jié)型
2024-09-30 17:56:07
機器人激光焊接機:高精度自動化焊接的未來1. 概述機器人激光焊接機是一種集成了工業(yè)機器人和激光焊接技術(shù)的先進自動化設(shè)備,通過高能量密度的激光束實現(xiàn)快速、精準(zhǔn)的焊接。該系統(tǒng)結(jié)合了機器人的靈活運動
2025-03-28 14:04:12
使用LabVIEW令“20歲”的機器人恢復(fù)活力
Author(s): Jonas Neubert - Imperial College London Industry: Research Products:
2009-11-30 09:30:23 921
921 采用NI LabVIEW和RIO技術(shù)開發(fā)的革命性獸醫(yī)影像系統(tǒng)
Animage和Fidex
Animage LLC是Exxim Computing Corporation公司的子公司,成立于2008年,為獸醫(yī)市場提供高端的影像產(chǎn)品
2009-12-02 11:20:51868 用CompactRIO和LabVIEW開發(fā)下一代機器人控制系統(tǒng)
Author(s):Bill Miller - FIRST Frank Merrick - FIRSTKate Pilotte
2010-01-21 17:01:00954 NI推出用于機器人控制系統(tǒng)的LabVIEW Robotics 2009
美國國家儀器有限公司(National Instruments,簡稱NI)近日宣布推出LabVIEW Robotics 2009。作為圖形化系統(tǒng)設(shè)計(GSD)軟件的新成員,
2010-02-02 17:39:431396 用于機器人的RIO嵌入式控制平臺
概覽
自動或半自動機器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感
2010-03-11 11:25:211172 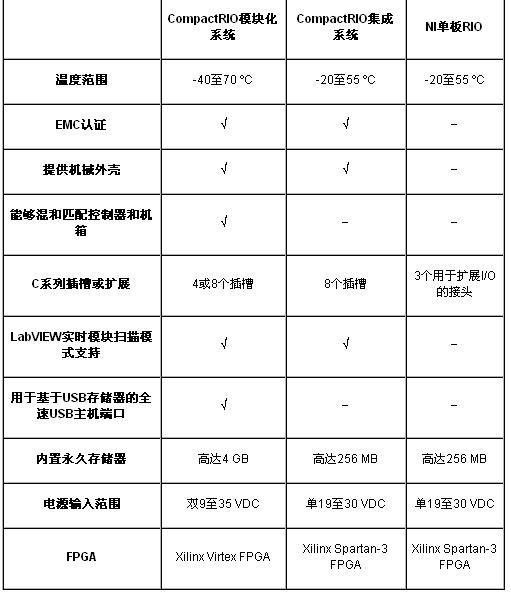
使用NI公司LabVIEW軟件和視覺硬件建立集成視覺和機器人的化妝品包裝生產(chǎn)線
為Vetraco的化妝粉案例生產(chǎn)線
2010-03-11 11:36:151380 LabVIEW機器人模塊-機器人選板中的特殊算法和API
概覽
本教程對LabVIEW機器人模塊軟件自帶的機器人算法進行介紹。從傳感器直至路徑規(guī)劃
2010-03-12 11:20:092903 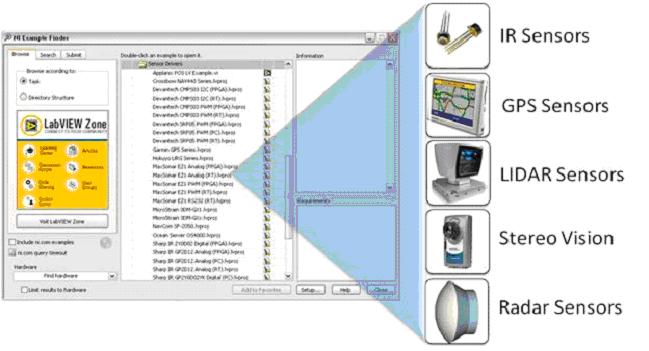
借助National Instruments的LabVIEW和嵌入式視覺系統(tǒng),使用多核并行循環(huán)程序設(shè)計,制造必將獲得比賽勝利的機器人
2011-03-25 12:09:131265 高級機器人學(xué)與步行機器人!資料來源網(wǎng)絡(luò),如有侵權(quán),敬請見諒
2015-11-20 15:08:240 步行者機器人資料,很好設(shè)計資料,快來學(xué)習(xí)吧。
2016-05-09 17:10:019 NI嵌入式應(yīng)用方法結(jié)合了LabVIEW系統(tǒng)設(shè)計軟件與可重配置的現(xiàn)成硬件。 該架構(gòu)基于四個組件: 處理器、可重配置FPGA、測量I/O硬件和LabVIEW。 硬件和軟件集成的平臺可以幫助您簡化諸多行業(yè)和應(yīng)用的系統(tǒng)開發(fā)。 在本文檔的第5部分中,您可以找到教程和示例代碼,初步了解如何利用該架構(gòu)。
2018-07-05 07:21:006672 本入門指南引導(dǎo)你通過使用NI LabVIEW機器人起步包建立一個移動式機器人。該原型使用LabVIEW 2009、LabVIEW實時和FPGA模塊對NI sbRIO-9631設(shè)備進行編程。通過本文
2017-11-17 02:12:019184 
盡管NIRo是小型的地面機器人,它用到的許多傳感器、算法和技術(shù)與大型的更復(fù)雜的機器人相同。通過LabVIEW Real-Time、LabVIEW FPGA及NI Single-Board RIO
2017-11-17 03:20:454317 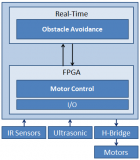
使用LabVIEW和用于DENSO的ImagingLab Robotics庫,機器視覺和機器人系統(tǒng)可以集成在一個應(yīng)用程序中。本文介紹了使用相同坐標(biāo)系統(tǒng)在機器視覺系統(tǒng)和機器人系統(tǒng)之間進行標(biāo)定的方法
2017-11-17 17:03:2514011 環(huán)境與商業(yè)現(xiàn)成可用(COTS)硬件相結(jié)合,大大簡化開發(fā),并提供了自定義設(shè)計的能力,幫助工程師實現(xiàn)更高質(zhì)量的設(shè)計。 1. NI LabVIEW RIO架構(gòu) 圖1. RIO System
2017-11-18 06:55:018319 Labview六軸關(guān)節(jié)機器人仿真
2018-01-03 16:42:3320 機器人取代人力的跡象越來越多,現(xiàn)代汽車集團(The?Hyundai?Motor Group)宣布,2018 年稍晚就會在汽車生產(chǎn)線導(dǎo)入可穿戴機器人(wearable robot),為韓國首度有這
2018-02-05 07:46:261451 LabVIEW幫助學(xué)生構(gòu)建智能機器人視頻教程
2018-06-26 03:11:003936 LabVIEW是一種程序開發(fā)環(huán)境,由美國國家儀器(NI)公司研制開發(fā)的,類似于C和BASIC開發(fā)環(huán)境,但是LabVIEW與其他計算機語言的顯著區(qū)別是:其他計算機語言都是采用基于文本的語言產(chǎn)生代碼,而LabVIEW使用的是圖形化編輯語言G編寫程序,產(chǎn)生的程序是框圖的形式。
2018-10-25 08:34:003220 據(jù)《朝日新聞》網(wǎng)站報道,由日本東京理科大學(xué)成立的風(fēng)投企業(yè)INNOPHYS近日研發(fā)出了一款可穿戴機器人“Muscle Upper”。這款機器人能對人體手腕及腰部關(guān)節(jié)活動起到輔助作用。
2018-10-18 17:03:449034 據(jù)報道,現(xiàn)代汽車集團已經(jīng)全面展開工業(yè)用穿戴型機器人的研發(fā),未來將加速高附加值領(lǐng)域的機器人事業(yè)發(fā)展。
2018-10-24 10:32:551318 據(jù)外媒報道,當(dāng)?shù)貢r間10月22日,現(xiàn)代汽車集團(Hyundai Motor Group)宣布其機器人部門推出兩款新型背心外骨骼(H-VEX)可穿戴的工業(yè)機器人。繼去年8月,該公司在現(xiàn)代-起亞北美
2018-10-26 09:30:352974 據(jù)外媒報道,現(xiàn)代汽車集團(HyundaiMotorGroup)宣布其機器人部門推出兩款新型背心外骨骼(H-VEX)可穿戴的工業(yè)機器人。
2018-11-01 14:39:563502 FRT成立于2015年3月,是一家以韓國生產(chǎn)技術(shù)研究院開發(fā)的機器人技術(shù)為基礎(chǔ),專門制造增強肌力型穿戴式機器人的初創(chuàng)企業(yè)。韓國生產(chǎn)技術(shù)研究院多年來致力于開發(fā)在災(zāi)難現(xiàn)場增強消防員肌力,提高滅火與救人效率的可穿戴式機器人“HyPER”。FRT正是為促進該事業(yè)而成立的公司。
2018-12-03 14:26:001864 VEX是一款采用背心式外骨骼裝置(Vest Exoskeleton)機器人。盡管目前市面上有幾款輔助仰頭作業(yè)的可穿戴式機器人,但現(xiàn)代·起亞汽車此次研發(fā)的產(chǎn)品在功能性、作業(yè)性、便利性及價格等方面均領(lǐng)先一步,備受業(yè)界好評。
2019-09-05 09:33:012118 雙足步行機器人是真正字面意義上或狹義的“機器人”,其研究和發(fā)展代表了機器人學(xué)的尖端水平。其中最重要的概念是零力矩點(Zero-MomentPoint,簡記ZMP)。本文基于雙足步行機器人ZMP控制與動力學(xué)模型,取得了以下主要的研究成果: 首先,本文分析了雙足機器人動態(tài)步行過程的運動學(xué)特征。
2019-12-31 16:51:0031 雙足步行機器人是一種仿人機器人,是移動式機器人領(lǐng)域中一類重要的仿生系統(tǒng)。雙足步行機器人作為一種移動式機器人,它與輪式,履帶式機器人相比有許多優(yōu)點與優(yōu)越性。由于雙足步行機器人的行走具有獨特的適應(yīng)性
2020-04-01 17:10:0020 機器人控制系統(tǒng)是機器人的大腦,是決定機器人功能和性能的主要因素。本研究將著重介紹一種基于RC伺服馬達控制系統(tǒng)的步行機器人的開發(fā)過程及應(yīng)用。在社會經(jīng)濟、科學(xué)技術(shù)飛速發(fā)展的當(dāng)代,機器人已經(jīng)是世界各國
2020-04-28 08:00:0027 現(xiàn)代機器人技術(shù)公司與現(xiàn)代工程建設(shè)公司合作開發(fā)建筑機器人。
2020-07-24 14:23:411007 電子發(fā)燒友網(wǎng)站提供《如何制作步行機器人.zip》資料免費下載
2023-07-04 10:37:170 ,該公司于1986年發(fā)布了首個版本的LabVIEW。 LabVIEW被廣泛應(yīng)用于各種應(yīng)用領(lǐng)域,如醫(yī)療設(shè)備、機器人控制、科學(xué)儀器、通信、航空航天等。 LabVIEW不同于其他傳統(tǒng)的編程語言,它通過圖形化的編程接口實現(xiàn)程序設(shè)計。LabVIEW的界面主要由前面板和后臺程序構(gòu)成。前面板是程序的用戶界面,在這里用
2023-08-31 17:23:307834
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論