電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2018-05-16 08:43:56 9242
9242 在本系列中,到目前為止,我們已經(jīng)討論了針對(duì)電機(jī)位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485或
2018-05-28 09:20:2212896 由于光電編碼器不僅能測(cè)位置還能通過一定的算法測(cè)速度,因此伺服電機(jī)通常在轉(zhuǎn)子軸的非負(fù)載端裝有光電編碼器。
2020-08-25 13:45:526463 
電機(jī)參數(shù)提取程序和帶編碼器接口的電機(jī)控制示例程序由瑞薩電子提供。因此,您可以使用 RA6T1 電機(jī)控制 RSSK 上的編碼器輕松運(yùn)行您自己的電機(jī)。(注1)
2022-04-26 09:53:325829 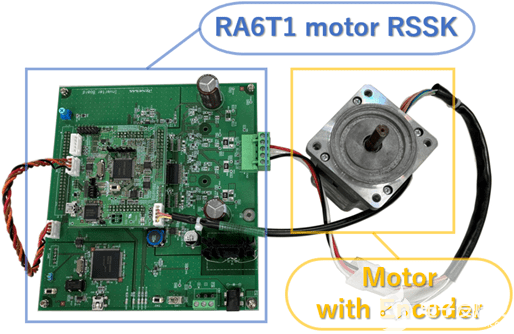
? ?1.?最常見的電機(jī)位置傳感器有哪些? 用于電機(jī)的最先進(jìn)的位置傳感器被認(rèn)為是基于旋轉(zhuǎn)變壓器(resolver-based)和編碼器(encoder-based)的傳感器。 1.1基于旋轉(zhuǎn)變壓器
2023-08-30 09:09:029164 
電機(jī)位置的呢?今天就來聊一聊編碼器。 一、什么是編碼器 編碼器是將信號(hào)或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲(chǔ)的信號(hào)形式的設(shè)備。編碼器把角位移或直線位移轉(zhuǎn)換成電信號(hào),前者稱為碼盤,后者稱為碼尺。他
2016-06-27 16:43:31
伺服電機(jī)的種類有哪些?伺服電機(jī)主要的作用是什么?編碼器的結(jié)構(gòu)域工作原理是什么?編碼器的分類和特點(diǎn)有哪些?伺服電機(jī)與編碼器的工作是什么?
2021-06-28 08:11:44
`描述此 TI 設(shè)計(jì)基于 HEIDENHAIN EnDat 2.2 標(biāo)準(zhǔn)實(shí)現(xiàn)適用于位置和旋轉(zhuǎn)編碼器的硬件接口解決方案。構(gòu)件塊包括編碼器電源(采用創(chuàng)新的智能 e-Fuse 技術(shù))和可靠的半雙工
2015-04-29 11:55:26
PMSM電機(jī)帶編碼器時(shí),常規(guī)的方法是相電流經(jīng)過PARK,CLARK變換后,進(jìn)行ArcTan算出電流方向再進(jìn)行補(bǔ)償,是否可以直接用編碼器反饋的位置信息進(jìn)行補(bǔ)償呢?
2024-04-08 07:53:42
我想問一下,TI的PMSM的例程庫里,增量編碼器永磁同步電機(jī),初始位置是通過什么方式實(shí)現(xiàn)的。在例程的那個(gè)位置,謝謝
2018-10-30 15:58:42
編碼器能夠滿足高精度、高可靠性、低成本的設(shè)計(jì)要求。那么將AS5040磁旋轉(zhuǎn)編碼器應(yīng)用于永磁同步電機(jī)位置檢測(cè)時(shí),需要解決兩個(gè)問題:一是磁旋轉(zhuǎn)編碼器安裝位置初始定位,即確定編碼器輸出的位置信號(hào)與電機(jī)實(shí)際
2021-09-22 09:41:15
在本系列中,到目前為止,我們已經(jīng)討論了針對(duì)電機(jī)位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。這些是使用基于RS-485或
2018-09-04 14:48:19
為什么要用電機(jī)驅(qū)動(dòng)?TB6612電機(jī)驅(qū)動(dòng)怎么實(shí)現(xiàn)?為什么要用電機(jī)編碼器?電機(jī)編碼器怎么使用?
2021-10-20 07:36:53
編碼器可以分為哪幾類?怎樣去讀取編碼器的位置值?伺服電機(jī)與編碼器是怎樣工作的?
2021-09-26 08:43:27
什么是脈沖當(dāng)量?伺服電機(jī)和編碼器有什么關(guān)系?伺服電機(jī)自帶編碼器為什么還要外加編碼器?
2021-11-01 06:20:22
編碼器的原理是什么?電機(jī)編碼器是如何進(jìn)行接線的?編碼器接口的配置方式有哪些?使用編碼器時(shí)有哪些注意事項(xiàng)?
2021-08-02 10:21:23
電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2018-09-05 16:07:42
角度,可以通過其SSI接口輸出,并由單片機(jī)或者DSP的SPI讀取。 由上圖三可以看到,電機(jī)位置角可以表示為:θ = Ax - (α1 + α2),由于Ax可以直接從磁編碼器芯片中讀取,為了能夠求出
2023-03-09 15:30:26
電機(jī)的旋轉(zhuǎn)編碼器輸出是5V的脈沖信號(hào),DSP是3.3V供電的,這個(gè)接口怎么設(shè)計(jì)?
2013-04-08 14:11:56
帶編碼器的步進(jìn)電機(jī),電機(jī)在工作的情況下有時(shí)會(huì)出現(xiàn)電機(jī)自身的步數(shù)和編碼器測(cè)得的步數(shù)不一致的情況!以編碼器測(cè)得的步數(shù)和電機(jī)自身的步數(shù)對(duì)比,調(diào)整電機(jī)步數(shù),有時(shí)會(huì)出現(xiàn)調(diào)整后的電機(jī)位置與預(yù)設(shè)位置不符現(xiàn)象,(步進(jìn)電機(jī)步數(shù)準(zhǔn)確,編碼器不準(zhǔn)確?)問下有什么辦法解決沒?
2018-05-09 22:37:31
在本博客系列的第一部分,Martin Staebler提供了各類電機(jī)位置編碼器及其接口的概述。在第二部分中,筆者將對(duì)雙向/串行/同步(BiSS)位置編碼器的接口進(jìn)行講解。 BiSS是來自
2018-09-05 16:07:37
請(qǐng)問一下運(yùn)動(dòng)控制卡中伺服電機(jī)的規(guī)劃位置與編碼器位置的區(qū)別是什么?
2021-10-12 11:24:30
上料小車傳動(dòng)電機(jī)(自帶編碼器)帶吸盤實(shí)現(xiàn)上料控制,小車軌道設(shè)置四個(gè)位置實(shí)現(xiàn)不同的控制要求。今天更換電機(jī)送電后小車無法實(shí)現(xiàn)精確定位,請(qǐng)問更換帶編碼器的電機(jī)后需要做哪些工作才能實(shí)現(xiàn)原來設(shè)定位置的精確控制。
哪位大師有編碼器實(shí)現(xiàn)位置控制的資料,能不能提供一些作為學(xué)習(xí)參考!!!謝謝!!!
2023-11-10 07:41:01
針對(duì)位置檢測(cè)的需要,提出了一種光電編碼器 位置檢測(cè) 系統(tǒng)。首先闡述了 光電編碼器 的工作原理,并對(duì)基于MSP430單片機(jī)位置檢測(cè)系統(tǒng)的硬件和軟件系統(tǒng)進(jìn)行了詳細(xì)的論述。結(jié)論證明,
2011-08-02 17:02:09 86
86 EnDat 2.2-位置編碼器雙向數(shù)字接口。
2016-03-14 15:50:0021 在本系列中,到目前為止,我們已經(jīng)討論了針對(duì)電機(jī)位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。這些是使用基于RS-485或
2017-04-26 12:08:116419 電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2017-04-26 13:16:121980 在本博客系列的第一部分,Martin Staebler提供了各類電機(jī)位置編碼器及其接口的概述。在第二部分中,筆者將對(duì)雙向/串行/同步(BiSS)位置編碼器的接口進(jìn)行講解。BiSS是來自iC-Haus公司的開源協(xié)議。它定義了適用于致動(dòng)器和傳感器(如旋轉(zhuǎn)編碼器或位置編碼器)的數(shù)字雙向串行接口。
2017-04-26 13:24:382285 泰德- 00179參考設(shè)計(jì)是一種符合EMC標(biāo)準(zhǔn)的通用數(shù)字接口,用于連接到絕對(duì)位置編碼器,例如EnDat 2.2,bis,SSI或HIPERFACE DSL。該設(shè)計(jì)支持15-60V(標(biāo)稱24 v)的寬
2017-05-04 16:35:2914 該TI設(shè)計(jì)基于雙標(biāo)準(zhǔn)實(shí)現(xiàn)適用于位置或旋轉(zhuǎn)編碼器的硬件接口解決方案。它既支持bis點(diǎn)對(duì)點(diǎn)配置又支持bis總線配置。構(gòu)件塊包括5 v的bis編碼器電源(采用創(chuàng)新的智能e-Fuse技術(shù))和可靠的全雙工
2017-05-08 17:13:0312 接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。增量式編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖,用脈沖的個(gè)數(shù)表示位移的大小。絕對(duì)式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,因
2017-05-24 11:41:0722 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價(jià)格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢(shì)。
2017-11-10 16:47:37137082 
在本文對(duì)雙向/串行/同步(BiSS)位置編碼器的接口進(jìn)行講解。 BiSS是來自iC-Haus公司的開源協(xié)議。它定義了適用于致動(dòng)器和傳感器(如旋轉(zhuǎn)編碼器或位置編碼器)的數(shù)字雙向串行接口。(更多詳情見
2017-11-17 01:55:5722951 
在本系列中,到目前為止,我們已經(jīng)討論了針對(duì)電機(jī)位置編碼器的不同數(shù)字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485或
2017-11-17 01:56:011736 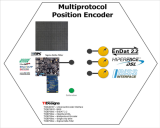
伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價(jià)格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢(shì)。
2018-02-03 11:34:5563612 正交編碼器接口(Quadrature Encoder Interface,QEI)模塊提供了與用于獲得機(jī)械位置數(shù)據(jù)的增 量式編碼器的接口。正交編碼器(也稱為增量式編碼器或光電式編碼器)用于檢測(cè)旋轉(zhuǎn)
2018-06-22 04:20:0014 在伺服電機(jī)的內(nèi)部零件中有一個(gè)是用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器叫伺服電機(jī)編碼器,根據(jù)物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2019-11-06 11:34:3413337 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價(jià)格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢(shì)。
2019-11-07 09:18:5311259 脈沖編碼器是一種光學(xué)式位置檢測(cè)元件,編碼盤直接裝在電機(jī)的旋轉(zhuǎn)軸上,以測(cè)出軸的旋轉(zhuǎn)角度位置和速度變化,其輸出信號(hào)為電脈沖。
2019-11-07 10:15:5019236 眾所周知, 直流伺服電機(jī) 控制器和編碼器是組成伺服控制系統(tǒng)的必要部件,直流伺服電機(jī)控制器主要通過讀取編碼器來獲得:伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速大小、轉(zhuǎn)子位置、轉(zhuǎn)子角度。可完成伺服電機(jī)轉(zhuǎn)速、電機(jī)轉(zhuǎn)速大小、轉(zhuǎn)角位置
2021-08-27 14:55:534603 的另一個(gè)應(yīng)用,即幫助把您選擇的數(shù)字位置編碼器主接口集成入Sitara處理器內(nèi)。
? 首先,讓我們來看下包含位置編碼器的系統(tǒng)層面方塊圖——見圖1。諸如伺服驅(qū)動(dòng)器等應(yīng)用通常都配有集成了數(shù)字位置反饋編碼器的電機(jī)
2021-11-10 09:38:571063 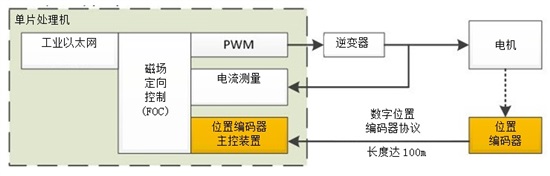
傳統(tǒng)型編碼器測(cè)速方案編碼器,經(jīng)常被用來測(cè)量速度或者顯示電機(jī)位置,大致分為絕對(duì)值式編碼器和增量式編碼器,顧名思義,相對(duì)應(yīng)的是產(chǎn)生增量或者絕對(duì)信號(hào)。增量信號(hào)不表示特定位置,只表示位置已經(jīng)更改;絕對(duì)信號(hào)
2021-12-31 18:53:2612 本文介紹工業(yè)自動(dòng)化領(lǐng)域的設(shè)計(jì)人員在設(shè)計(jì)用于電機(jī)控制的位置檢測(cè)接口時(shí)面臨的常見問題,即:能在速度更快、尺寸更小的應(yīng)用中檢測(cè)位置。利用從編碼器捕獲的信息以便精確測(cè)量電機(jī)位置對(duì)于自動(dòng)化和機(jī)器設(shè)備的成功運(yùn)行很重要。快速、高分辨率、雙通道同步采樣模數(shù)轉(zhuǎn)換器(ADC)是此系統(tǒng)的重要組件。
2022-04-01 13:43:512560 本文介紹工業(yè)自動(dòng)化領(lǐng)域的設(shè)計(jì)人員在設(shè)計(jì)用于電機(jī)控制的位置檢測(cè)接口時(shí)面臨的常見問題,即:能在速度更快、尺寸更小的應(yīng)用中檢測(cè)位置。利用從編碼器捕獲的信息以便精確測(cè)量電機(jī)位置對(duì)于自動(dòng)化和機(jī)器設(shè)備的成功運(yùn)行很重要。快速、高分辨率、雙通道同步采樣模數(shù)轉(zhuǎn)換器(ADC)是此系統(tǒng)的重要組件。
2022-04-09 11:25:273150 電機(jī)編碼器配置種類繁多,例如增量式或絕對(duì)式,光學(xué)或磁性,帶軸或輪轂/空心軸等。所使用的電機(jī)編碼器的類型取決于許多因素,尤其是電機(jī)類型,需要閉環(huán)反饋的應(yīng)用以及所需的安裝配置。
2022-10-11 14:44:145221 本文深入探討了工業(yè)自動(dòng)化中電機(jī)控制位置傳感接口設(shè)計(jì)人員面臨的常見問題,即能夠在更快、更小尺寸的應(yīng)用中感測(cè)位置。從編碼器捕獲信息以準(zhǔn)確測(cè)量電機(jī)位置對(duì)于自動(dòng)化和機(jī)器人設(shè)備的成功運(yùn)行非常重要。快速、高分辨率、雙通道、同步采樣模數(shù)轉(zhuǎn)換器(ADC)是該系統(tǒng)的重要組成部分。
2022-12-20 11:32:311366 
伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價(jià)格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢(shì)。
2023-02-24 11:56:383643 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價(jià)格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢(shì)。
2023-02-27 17:50:212951 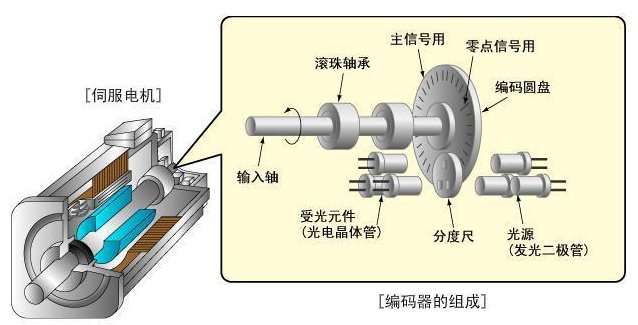
伺服電機(jī)編碼器故障的意思是編碼器組件出現(xiàn)故障,導(dǎo)致其無法生成和輸出正確的波形。在這種情況下,維修的方法是更換編碼器或修理其內(nèi)部部件。
2023-03-01 15:46:4215728 
伺服電機(jī)編碼器在更換了相應(yīng)的編碼器以后,基本上都要進(jìn)行相應(yīng)的調(diào)零對(duì)位。伺服電機(jī)編碼器調(diào)零對(duì)位一般設(shè)計(jì)到伺服電機(jī)編碼器的拆除,在拆除伺服電機(jī)編碼器時(shí)要對(duì)伺服電機(jī)編碼器的安裝位置進(jìn)行記錄,保證伺服電機(jī)的正常云運(yùn)行。?
2023-03-10 16:30:5919325 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價(jià)格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢(shì)。
2023-03-20 09:12:432486 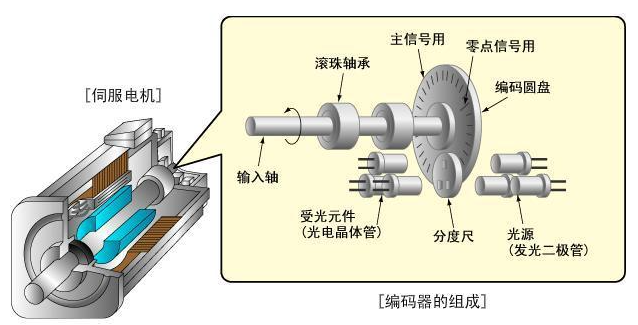
首先,讓我們來看下包含位置編碼器的系統(tǒng)層面方塊圖——見圖1。諸如伺服驅(qū)動(dòng)器等應(yīng)用通常都配有集成了數(shù)字位置反饋編碼器的電機(jī)。位置編碼作為傳感器,能夠精準(zhǔn)測(cè)量電機(jī)軸的角度(以度為單位)或線性軸(以微米為單位)的距離。
2023-04-12 09:14:161733 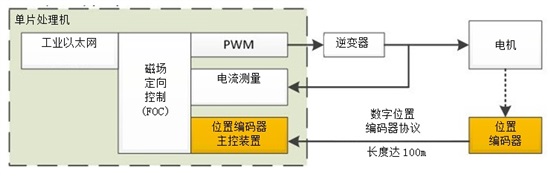
本篇來介紹電機(jī)的位置環(huán)控制,實(shí)現(xiàn)電機(jī)快速準(zhǔn)確地轉(zhuǎn)動(dòng)到指定位置。回顧上篇,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來看電機(jī)位置PID
2023-05-06 11:50:369 在選擇伺服電機(jī)編碼器時(shí),需要考慮多個(gè)因素,例如精度、分辨率、速度、穩(wěn)定性、可靠性等。以下是一些常見的伺服電機(jī)編碼器類型及其特點(diǎn): (1)光電編碼器:光電編碼器具有高精度、高分辨率、高速度等特點(diǎn)
2023-06-09 08:20:022118 編碼器種類及型號(hào):最常見的編碼器類型是旋轉(zhuǎn)編碼器和線性編碼器。旋轉(zhuǎn)編碼器通常用于測(cè)量機(jī)器人的關(guān)節(jié)位置,以及測(cè)量車輛和船只的轉(zhuǎn)向角度。線性編碼器通常用于測(cè)量運(yùn)動(dòng)平臺(tái)的位置和速度。旋轉(zhuǎn)編碼器和線性編碼器可以分為絕對(duì)式和增量式編碼器。絕對(duì)式編碼器可以直接讀取位置信息,而增量式編碼器則需要計(jì)算位置信息。
2023-05-18 11:15:008136 
伺服電機(jī)編碼器 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:012267 多維科技TMR3103和TMR3106角度編碼器芯片產(chǎn)品適用于BLDC無刷電機(jī)位置檢測(cè)、轉(zhuǎn)速檢測(cè)、閉環(huán)步進(jìn)電機(jī)位置檢測(cè)及多種非接觸式角度檢測(cè)等應(yīng)用。
2023-07-03 14:50:462395 
其他執(zhí)行器。通過位置模式,可以實(shí)現(xiàn)準(zhǔn)確的物料定位和裝配操作。 (3)在包裝和印刷行業(yè)中,伺服電機(jī)位置模式被廣泛應(yīng)用于驅(qū)動(dòng)送料系統(tǒng)、定位裝置和印刷頭等設(shè)備。通過位置模式,可以實(shí)現(xiàn)精確的紙張或包裝材料的定位和運(yùn)動(dòng)控制
2023-08-15 08:25:012258 增量型編碼器和絕對(duì)值編碼器是兩種常見的位置控制裝置,它們?cè)诳刂?b class="flag-6" style="color: red">位置方面有著不同的工作原理和特點(diǎn)。雖然它們都可以用于位置控制,但是在某些方面存在差異。首先,增量型編碼器是通過檢測(cè)位置變化的增量來確定
2023-08-18 14:43:501716 
伺服電機(jī)編碼器原理伺服編碼器這個(gè)基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號(hào),除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機(jī)多數(shù)為同步電機(jī)
2023-08-25 08:08:542659 
伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上
2023-08-25 08:09:034363 知道轉(zhuǎn)子的磁極位置,這樣才能夠大力矩啟動(dòng)伺服電機(jī),這樣需要另外配幾路信號(hào)來檢測(cè)轉(zhuǎn)子的當(dāng)前位置,比如增量型的就有UVW等信號(hào),正因?yàn)橛辛诉@幾路檢測(cè)轉(zhuǎn)子位置的信號(hào),伺服編碼器顯得有點(diǎn)復(fù)雜了,以致一般人弄不懂它的道理了,加上有些廠家故意掩遮一些信號(hào),相關(guān)的資料不齊全,就更加增添了伺服電機(jī)編碼器的神秘色彩。
2023-09-22 14:19:582370 ,同步電機(jī)啟動(dòng)的時(shí)候需要知道轉(zhuǎn)子的磁極位置,這樣才能夠大力矩啟動(dòng)伺服電機(jī),這樣需要另外配幾路信號(hào)來檢測(cè)轉(zhuǎn)子的當(dāng)前位置,比如增量型的就有UVW等信號(hào),正因?yàn)橛辛诉@幾路檢測(cè)轉(zhuǎn)子位置的信號(hào),伺服編碼器顯得有點(diǎn)復(fù)雜了,以致一般人弄
2023-09-25 14:07:173731 無磁鐵雙線圈技術(shù)為機(jī)器人、工業(yè)和醫(yī)療設(shè)備中使用的電機(jī)位置傳感器及編碼器帶來高分辨率、高精度和高可靠性
2023-10-27 10:00:551386 位置編碼器(也稱為電機(jī)編碼器)可提供準(zhǔn)確的位置和扭矩控制,支持未來工廠的先進(jìn)運(yùn)動(dòng)控制應(yīng)用。借助精密位置編碼器,能夠以更少的工序步驟和更短的時(shí)間加工復(fù)雜的部件,并且能耗更低,從而提高生產(chǎn)質(zhì)量和產(chǎn)量,實(shí)現(xiàn)可持續(xù)性發(fā)展。
2023-11-13 16:29:011200 
電子發(fā)燒友網(wǎng)站提供《TIDA-060040-帶有用于精確電機(jī)位置控制的霍爾效應(yīng)傳感器的絕對(duì)角度編碼器 PCB layout 設(shè)計(jì).pdf》資料免費(fèi)下載
2024-05-21 16:05:044 編碼器是一種將機(jī)械運(yùn)動(dòng)轉(zhuǎn)換為數(shù)字電信號(hào)的傳感器。當(dāng)駕駛員想要控制電機(jī)旋轉(zhuǎn)時(shí),U、V、W三相電氣輸出驅(qū)動(dòng)電機(jī)運(yùn)行。為了將電機(jī)轉(zhuǎn)到某個(gè)位置或角度,我們將此位置稱為目標(biāo)值。我們需要知道此時(shí)電機(jī)轉(zhuǎn)動(dòng)的幅度
2024-01-17 17:02:123342 
伺服電機(jī)編碼器是一種關(guān)鍵的反饋裝置,用于測(cè)量和控制電機(jī)的轉(zhuǎn)速和位置。在選擇伺服電機(jī)編碼器時(shí),常常面臨一個(gè)選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個(gè)關(guān)鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:025342 伺服電機(jī)的編碼器是用來測(cè)量電機(jī)轉(zhuǎn)動(dòng)角度和速度的重要部件。然而,由于長時(shí)間運(yùn)行、環(huán)境因素等原因,編碼器可能會(huì)出現(xiàn)故障,影響電機(jī)的準(zhǔn)確運(yùn)行。下面將介紹伺服電機(jī)編碼器的故障原因和維修方法,并介紹編碼器的調(diào)
2024-02-14 18:06:0030696 伺服電機(jī)編碼器調(diào)零對(duì)位是指通過調(diào)整編碼器的零位來使得電機(jī)的位置精準(zhǔn)對(duì)位。編碼器是一種能夠?qū)⑽锢砹哭D(zhuǎn)換為電信號(hào)的裝置,它可以測(cè)量電機(jī)轉(zhuǎn)動(dòng)的角度或位置。 在進(jìn)行伺服電機(jī)編碼器調(diào)零對(duì)位之前,我們首先要
2024-01-25 11:32:087731 編碼器零點(diǎn)位置怎么看 要確定編碼器的零點(diǎn)位置,可以通過以下幾種方式進(jìn)行觀察: 1. 物理標(biāo)記點(diǎn):一些編碼器在其旋轉(zhuǎn)軸上具有專門的物理標(biāo)記點(diǎn),例如凹槽或凸起。通過觀察軸上的標(biāo)記點(diǎn),可以確定零點(diǎn)位置
2024-02-18 18:28:194677 
本文介紹工業(yè)自動(dòng)化領(lǐng)域的設(shè)計(jì)人員在設(shè)計(jì)用于電機(jī)控制的位置檢測(cè)接口時(shí)面臨的常見問題,即在速度更快、尺寸更小的應(yīng)用中檢測(cè)位置。利用從編碼器捕獲的信息以便精確測(cè)量電機(jī)位置對(duì)于自動(dòng)化和機(jī)器設(shè)備的成功運(yùn)行很重
2024-04-12 08:24:171258 
絕對(duì)值編碼器在電機(jī)控制系統(tǒng)中的應(yīng)用
在電機(jī)控制系統(tǒng)中,絕對(duì)值編碼器帶來了精確的位置反饋信號(hào)。依據(jù)編碼器的輸出脈沖信號(hào),電機(jī)控制器能夠計(jì)算出電動(dòng)機(jī)的實(shí)時(shí)轉(zhuǎn)速和位置,以此來實(shí)現(xiàn)精確的位置控制。除此之外
2024-05-21 10:55:362696 
。本文將詳細(xì)介紹伺服電機(jī)后面的編碼器的作用、工作原理、分類以及在伺服系統(tǒng)中的應(yīng)用。 一、編碼器的作用 編碼器是一種將機(jī)械位置或角度轉(zhuǎn)換為電信號(hào)的傳感器。在伺服電機(jī)系統(tǒng)中,編碼器的主要作用如下: 位置檢測(cè):編碼器
2024-06-05 14:53:584018 角度轉(zhuǎn)換為電信號(hào)的裝置。編碼器的輸出信號(hào)與電機(jī)軸的旋轉(zhuǎn)角度成正比,因此,編碼器的精度直接影響到電機(jī)的控制精度。調(diào)零操作的目的是將編碼器的輸出信號(hào)與電機(jī)軸的實(shí)際位置對(duì)齊,以確保電機(jī)控制的準(zhǔn)確性。 伺服電機(jī)編碼器調(diào)零
2024-06-05 15:41:498659 伺服電機(jī)編碼器是伺服系統(tǒng)中的重要組成部分,它的作用是將伺服電機(jī)的旋轉(zhuǎn)位置、速度等信息轉(zhuǎn)換成電信號(hào),為控制系統(tǒng)提供反饋信息。 一、伺服電機(jī)編碼器的作用 伺服電機(jī)編碼器的主要作用有以下幾點(diǎn): 位置反饋
2024-06-17 10:52:004038 插頭線接線原理 伺服電機(jī)編碼器的作用 伺服電機(jī)編碼器是一種將電機(jī)軸的旋轉(zhuǎn)位置、速度等信息轉(zhuǎn)換為電信號(hào)的傳感器。編碼器輸出的信號(hào)經(jīng)過處理后,可以用于控制伺服電機(jī)的運(yùn)行狀態(tài),實(shí)現(xiàn)精確的位置控制和速度控制。 伺服電機(jī)編
2024-06-17 10:56:015851 電機(jī)的重要組成部分,用于測(cè)量電機(jī)軸的旋轉(zhuǎn)角度和速度,實(shí)現(xiàn)精確控制。 伺服電機(jī)編碼器的類型 增量式編碼器:通過測(cè)量脈沖數(shù)量來確定位置和速度。 絕對(duì)式編碼器:直接測(cè)量電機(jī)軸的絕對(duì)位置。 伺服電機(jī)編碼器故障的原因 機(jī)械故障:
2024-06-17 11:00:301958 編碼器的好壞。 一、伺服電機(jī)編碼器的工作原理 伺服電機(jī)編碼器是一種將機(jī)械位置信號(hào)轉(zhuǎn)換為電信號(hào)的傳感器,其工作原理是利用光電轉(zhuǎn)換原理,將編碼器上的光柵與電機(jī)軸上的光柵相對(duì)運(yùn)動(dòng),通過光電轉(zhuǎn)換器件將光信號(hào)轉(zhuǎn)換為電信號(hào)
2024-06-17 11:02:303571 ,包括故障現(xiàn)象、故障原因、診斷方法和排除措施。 一、伺服電機(jī)編碼器故障現(xiàn)象 電機(jī)無法啟動(dòng)或啟動(dòng)困難 電機(jī)運(yùn)行不穩(wěn)定,出現(xiàn)抖動(dòng)或振動(dòng) 電機(jī)轉(zhuǎn)速不穩(wěn)定,出現(xiàn)波動(dòng)或偏差 電機(jī)定位精度下降,無法達(dá)到預(yù)期位置 電機(jī)運(yùn)行噪音增大
2024-06-17 11:05:167470 伺服電機(jī)編碼器是伺服電機(jī)的重要組成部分,它能夠?qū)?b class="flag-6" style="color: red">電機(jī)的旋轉(zhuǎn)角度、速度等信息轉(zhuǎn)換為電信號(hào),為控制系統(tǒng)提供精確的位置和速度反饋。 一、伺服電機(jī)編碼器的分類 1.1 增量式編碼器 增量式編碼器是一種常見
2024-06-17 11:07:324911 電機(jī)編碼器的作用 位置檢測(cè) 伺服電機(jī)編碼器的主要作用之一是實(shí)現(xiàn)對(duì)伺服電機(jī)轉(zhuǎn)子位置的實(shí)時(shí)檢測(cè)。編碼器通過測(cè)量轉(zhuǎn)子的旋轉(zhuǎn)角度,將位置信號(hào)轉(zhuǎn)換為電信號(hào),從而實(shí)現(xiàn)對(duì)伺服電機(jī)的精確控制。這對(duì)于保證伺服電機(jī)的穩(wěn)定性和精度具
2024-06-17 11:09:114194 伺服電機(jī)編碼器的零點(diǎn)問題是一個(gè)非常重要的話題,它關(guān)系到伺服電機(jī)的精確控制和定位。 伺服電機(jī)編碼器的基本概念 伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、航空航天等領(lǐng)域。伺服
2024-06-17 11:11:322842 分辨率的定義 伺服電機(jī)編碼器的分辨率是指編碼器能夠分辨的最小角度或位置變化。通常用每轉(zhuǎn)脈沖數(shù)(PPR)或每毫米脈沖數(shù)(P/M)來表示。PPR表示編碼器每轉(zhuǎn)一圈產(chǎn)生的脈沖數(shù),P/M表示編碼器每移動(dòng)1毫米產(chǎn)生的脈沖數(shù)。 伺服電機(jī)編碼
2024-06-17 11:13:193674 引言 伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。編碼器作為伺服電機(jī)的重要組成部分,其作用是檢測(cè)電機(jī)的轉(zhuǎn)速、位置和方向,為控制系統(tǒng)提供反饋信號(hào)。三菱電機(jī)作為
2024-06-17 14:11:535847 、編碼器的基本原理 編碼器是一種將機(jī)械位置轉(zhuǎn)換為電信號(hào)的傳感器,用于測(cè)量和控制電機(jī)的位置和速度。編碼器通常由一個(gè)旋轉(zhuǎn)的轉(zhuǎn)子和一個(gè)固定的定子組成。轉(zhuǎn)子上有一系列均勻分布的凹槽或凸起,而定子上有一系列光電元件或磁
2024-06-17 14:21:085854 引言 伺服電機(jī)是工業(yè)自動(dòng)化領(lǐng)域中常用的一種電機(jī),具有高精度、高響應(yīng)速度和高穩(wěn)定性等特點(diǎn)。編碼器作為伺服電機(jī)的重要組成部分,負(fù)責(zé)將電機(jī)的旋轉(zhuǎn)位置和速度信息轉(zhuǎn)換為電信號(hào),以實(shí)現(xiàn)對(duì)電機(jī)的精確控制。然而
2024-06-17 14:22:452646 與驅(qū)動(dòng)器配合使用,實(shí)現(xiàn)精確的速度和位置控制。編碼器的類型和接口方式對(duì)電機(jī)的性能和穩(wěn)定性有重要影響。 編碼器的類型 編碼器主要分為增量式和絕對(duì)式兩種類型。增量式編碼器通過測(cè)量脈沖的數(shù)量來確定位置變化,而絕對(duì)式編碼器可以
2024-06-17 15:10:302868 伺服電機(jī)編碼器分很多種,有直接轉(zhuǎn)速型編碼器、有位置分辨率型編碼器、有高精度位姿編碼輸出和高靈敏度位移測(cè)量等類型。下面我們來了解一下伺服電機(jī)編碼器如何分類: ? 一、直接轉(zhuǎn)速型編碼器 這種類型的編碼器
2024-07-21 17:01:133369 編碼器還可以提供電機(jī)的絕對(duì)位置信息,這對(duì)于AGV系統(tǒng)的定位和校準(zhǔn)至關(guān)重要。在AGV系統(tǒng)中,一般會(huì)使用Z信號(hào)來表示編碼器的絕對(duì)位置。Z信號(hào)是一個(gè)特殊的脈沖,它在編碼器旋轉(zhuǎn)一周時(shí)只產(chǎn)生一次。通過檢測(cè)Z信號(hào)的上升沿或下降沿,可以確定編碼器軸的絕對(duì)位置,并進(jìn)行位置校準(zhǔn)和零位標(biāo)記。
2024-07-22 11:33:401441 
在現(xiàn)代工業(yè)自動(dòng)化和控制系統(tǒng)中,伺服電機(jī)編碼器扮演著至關(guān)重要的角色。它能夠精確測(cè)量電機(jī)的位置、速度和方向,為系統(tǒng)提供準(zhǔn)確的反饋信息,實(shí)現(xiàn)高精度的運(yùn)動(dòng)控制。伺服電機(jī)編碼器作為伺服系統(tǒng)中的關(guān)鍵部件,其性能和可靠性直接影響著整個(gè)系統(tǒng)的運(yùn)行效果。
2025-01-20 14:01:181822 
伺服電機(jī)編碼器故障及維修,伺服電機(jī)編碼器4大常見故障,編碼器信號(hào)丟失或不穩(wěn)定,編碼器零點(diǎn)偏移,編碼器過熱,編碼器機(jī)械損壞;伺服電機(jī)編碼器4大維修方法:在維修伺服電機(jī)編碼器時(shí),需要維修人員具備一定
2025-01-21 14:49:354303 ? ? ? 絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用廣泛且重要,其優(yōu)勢(shì)顯著,以下是對(duì)其應(yīng)用與優(yōu)勢(shì)的詳細(xì)分析: ? ? ??一、絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用 ? ? ? 絕對(duì)式編碼器是一種常用的位置
2025-02-06 09:46:151722 
伺服電機(jī)編碼器的選型是一個(gè)綜合性的過程,需要考慮多個(gè)因素以確保所選編碼器能夠滿足系統(tǒng)的性能要求。以下是一些關(guān)鍵的選型步驟和考慮因素: 一、明確應(yīng)用需求 首先,需要明確伺服電機(jī)編碼器的應(yīng)用需求,包括
2025-03-11 12:01:041702 
磁旋轉(zhuǎn)編碼器能夠滿足高精度、高可靠性、低成本的設(shè)計(jì)要求。 那么將 AS5040 磁旋轉(zhuǎn)編碼器應(yīng)用于永磁同步電機(jī)位置檢測(cè)時(shí),需要解決兩個(gè)問題:一是 磁旋轉(zhuǎn)編碼器安裝
2025-04-09 13:37:220 AB PLC與編碼器通過EthernetIP轉(zhuǎn)CAN通訊的完整應(yīng)用案例 一、項(xiàng)目背景與需求 某自動(dòng)化生產(chǎn)線需實(shí)現(xiàn)伺服軸的高精度位置檢測(cè),采用 AB CompactLogix 5000 系列 PLC
2025-06-21 13:09:251139 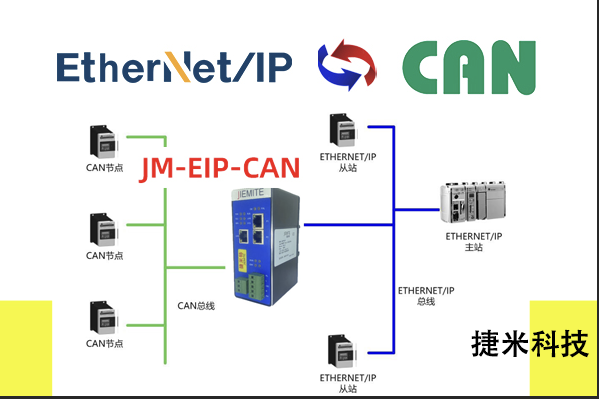
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論