 Ethernet/IP 轉 CAN 實戰:AB PLC 通過編碼器實現伺服電機位置閉環控制
Ethernet/IP 轉 CAN 實戰:AB PLC 通過編碼器實現伺服電機位置閉環控制

AB PLC與編碼器通過EthernetIP轉CAN通訊的完整應用案例
一、項目背景與需求
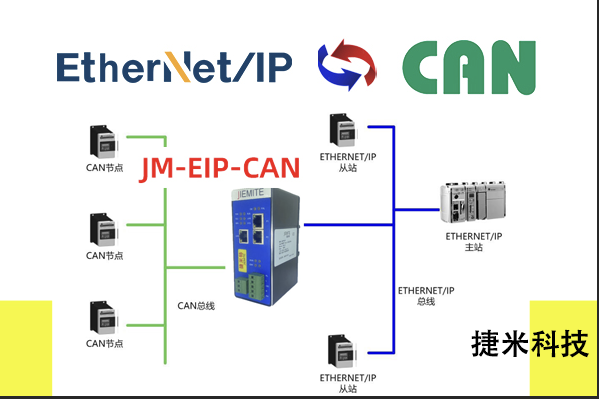
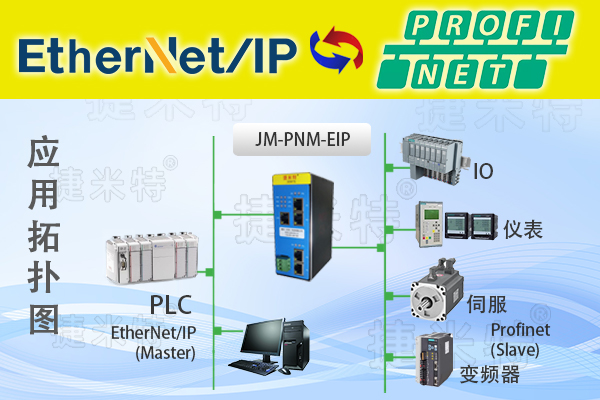
某自動化生產線需實現伺服軸的高精度位置檢測,采用 AB CompactLogix 5000 系列 PLC 作為主控設備,搭配 20 位絕對值編碼器(支持 CANopen 協議)。由于 PLC 原生支持 EthernetIP 協議,需通過Ethernet/IP轉CAN(JM-EIP-CAN)網關實現協議轉換,確保編碼器數據實時接入 PLC 控制系統。
二、系統架構與技術參數
1.硬件配置
oPLC:AB CompactLogix L35E CPU,集成 EthernetIP 接口,支持 100Mbps 通訊速率。
o編碼器:海德漢 ERN 1387,20 位絕對值編碼器,CANopen 協議,通訊速率 1Mbps。
o網關:ProSoft MVI56E-MCM,Ethernet/IP轉CAN網關,支持 CANopen 主 / 從模式,支持熱插拔。
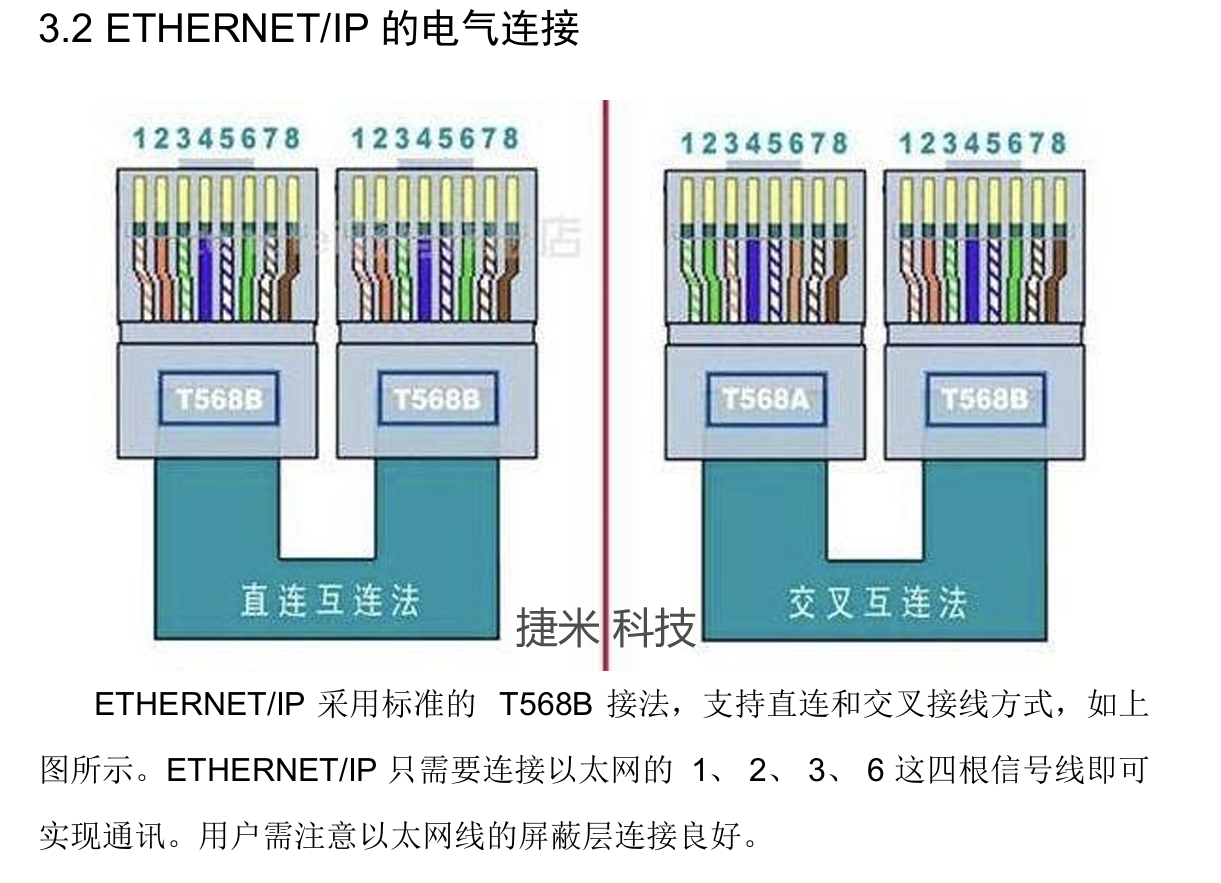
o線纜:CAN 總線采用屏蔽雙絞線,終端電阻 120Ω;EthernetIP 使用工業級網線。
2.技術參數
| 組件 | 關鍵參數 |
| AB PLC | 數據處理周期≤10ms,支持 EthernetIP 實時 I/O 映射 |
| 編碼器 | 分辨率 1/2^20(約 100 萬脈沖 / 圈),位置更新頻率≤1ms |
| 捷米特EthernetIP 轉 CAN網關 | 協議轉換延遲≤5ms,支持 CANopen DS301/DS401 協議,支持 16 個節點配置 |
三、配置步驟詳解
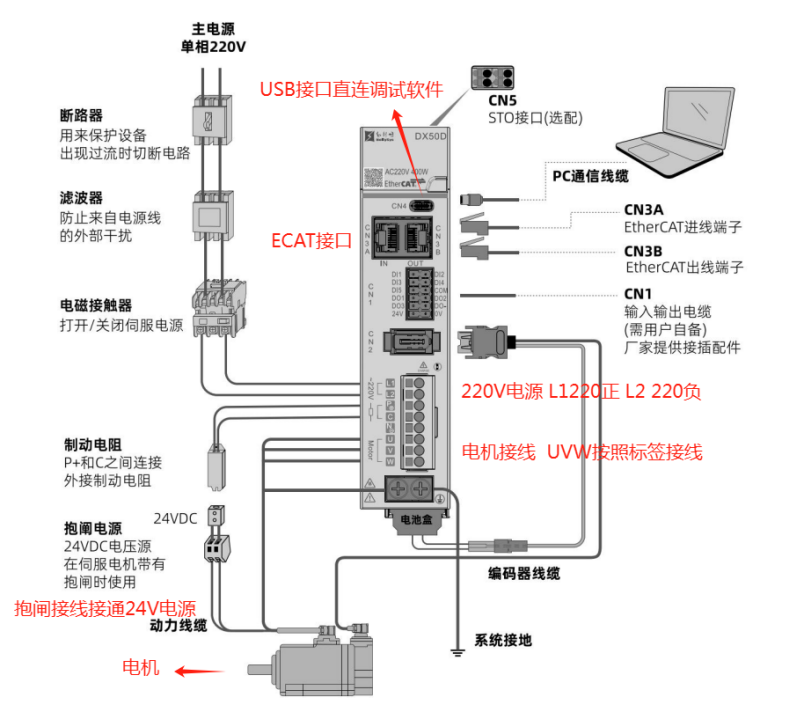
1. 硬件連接與網關初始化
·將Ethernet/IP轉CAN網關插入 PLC 機架的擴展槽,通過網線連接 PLC 的 EthernetIP 端口;
·編碼器 CAN_H/CAN_L 接入網關 CAN 接口,終端電阻接入總線末端;
·網關電源接入 24V DC,通過 ProSoft Configuration Manager 軟件掃描設備,配置網關 IP 地址(如 192.168.1.10)。
2. PLC 端 EthernetIP 配置
·在 AB Studio 中創建項目,添加 CompactLogix CPU,啟用 EthernetIP 接口;
·在 I/O Configuration 中添加Ethernet/IP轉CAN網關設備,配置設備名稱(如 “CAN_Gateway”)和通訊參數(超時時間 500ms,更新頻率 10ms);
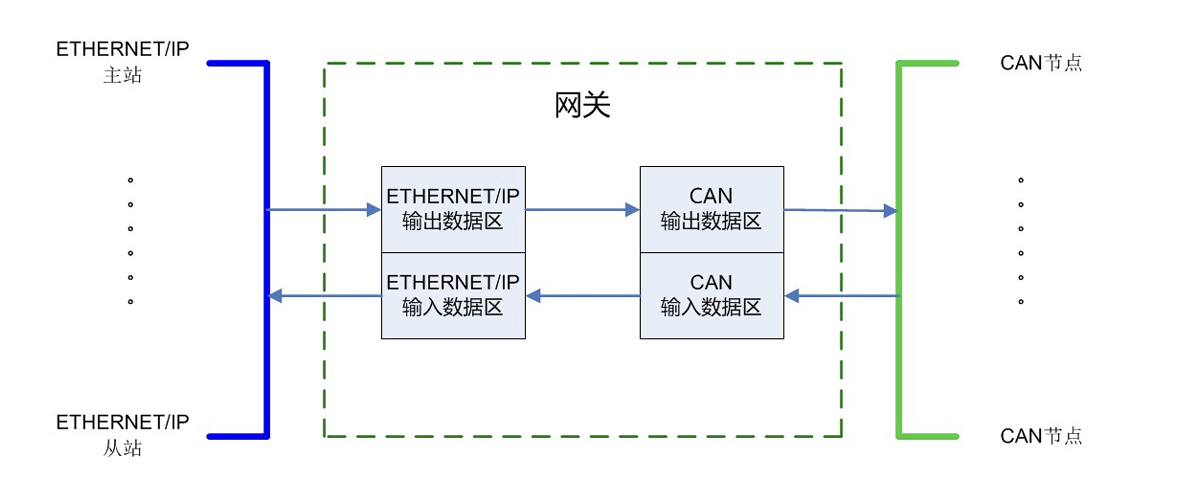
·建立輸入 / 輸出數據映射表,例如:
o編碼器位置數據映射至 PLC 標簽 “Encoder_Position [0..3]”(4 字節浮點型);
o編碼器狀態字映射至 “Encoder_Status”(1 字節)。
o
3. 網關端 CANopen 配置
·打開 ProSoft 網關配置工具,選擇 “CANopen 從站模式”,設置編碼器為從站節點(ID=10);
·配置 CANopen 通訊參數:波特率 1Mbps,數據幀格式 8 位數據 + 1 位停止位;
·定義 PDO(過程數據對象)映射:
oPDO1 映射編碼器位置值(索引 0x6064,長度 32 位)至網關輸出緩沖區;
oPDO2 映射編碼器狀態(索引 0x6041,長度 8 位)至網關輸出緩沖區。
3.編碼器參數設置
關于總線終端和拓撲結構: 470m 410m 640m 550m 480m 為了增強 CAN 通訊的可靠性,CAN 總線網絡的兩個端點通常要加入終端匹 配電阻,終端匹配電阻的大小由傳輸電纜的特性阻抗所決定。用戶應在實際構成 網絡中加以考慮。 網關已經在產品內置了 RT 為 120 歐姆電阻,用戶若需要將 CAN 的總線 終端接入網絡中,只需將 CANL 和 RL 短接,CANH 和 RH 短接。
·通過編碼器配置軟件(如海德漢 iTNC)設置 CANopen 節點 ID=10,波特率 1Mbps;
·啟用循環同步模式(Cyclic Synchronous Position),更新周期 1ms;
·配置位置數據輸出格式為絕對值(工程單位 mm),映射至 PDO1。

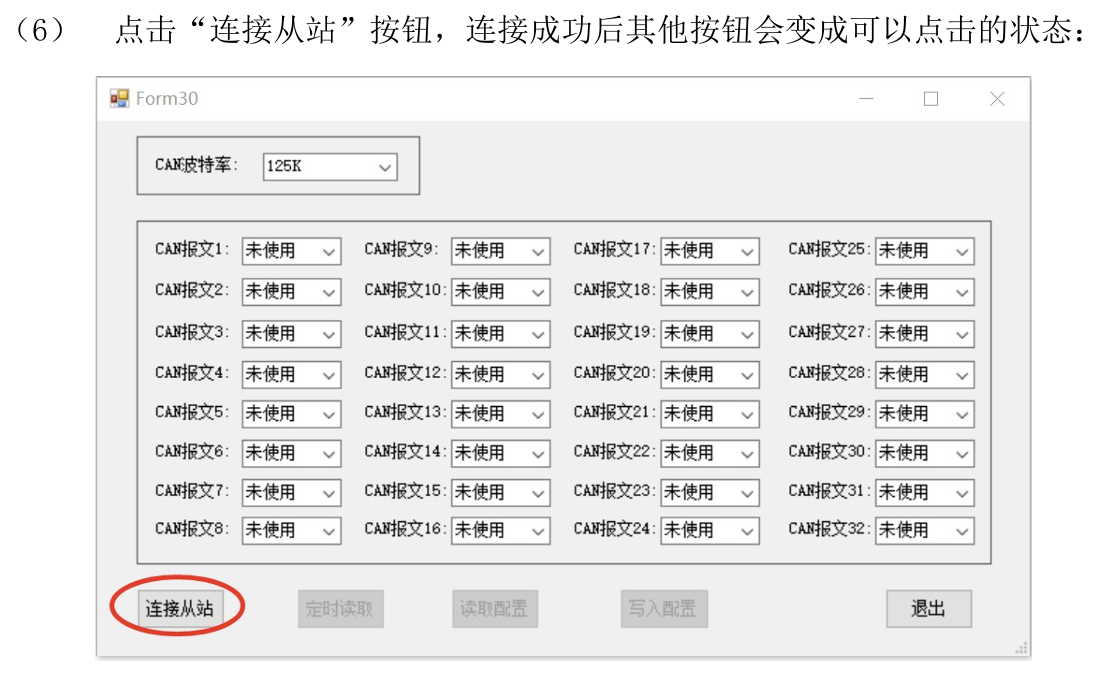
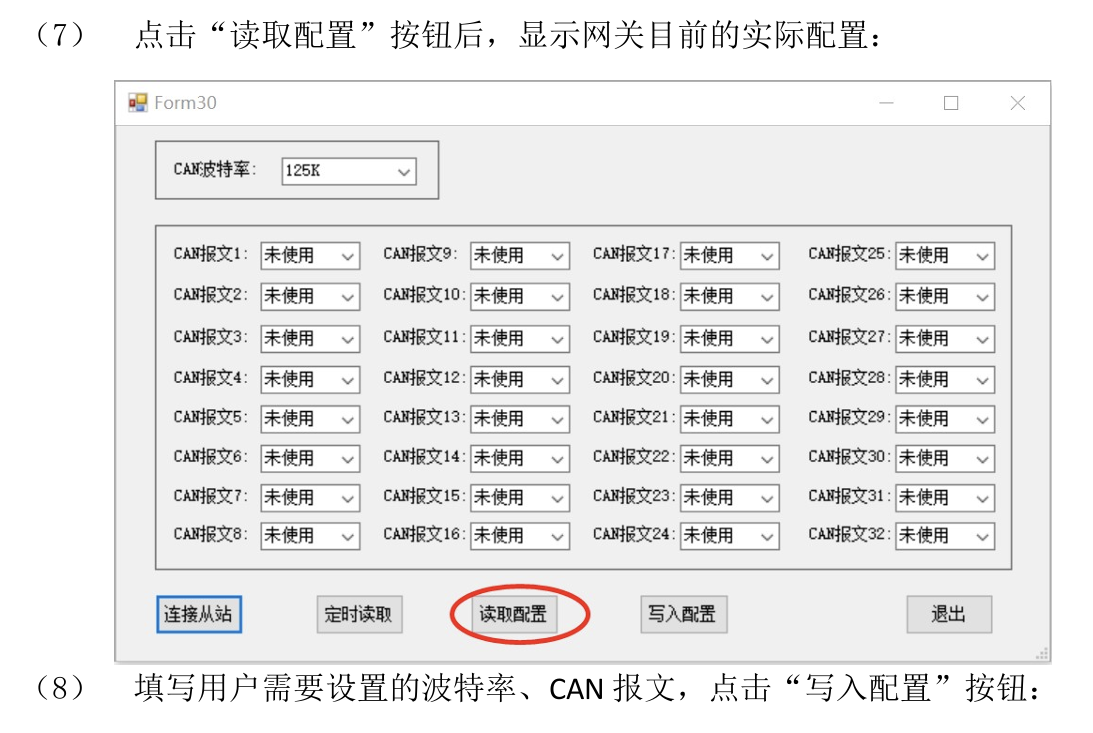
使用 GW Modbus Bulider軟件配置 CAN 報文
(1) 使用網線將電腦與網關相應的網口連接。
(2) 將撥碼的第 8 位撥到 ON,此時網關處于配置狀態,然后給網關供電。
(3) 網關處于配置狀態時,此時網口使用 192.168.1.201 的 IP 地址,應使電
腦的 IP 網段設置于 192.168.1.xxx 。
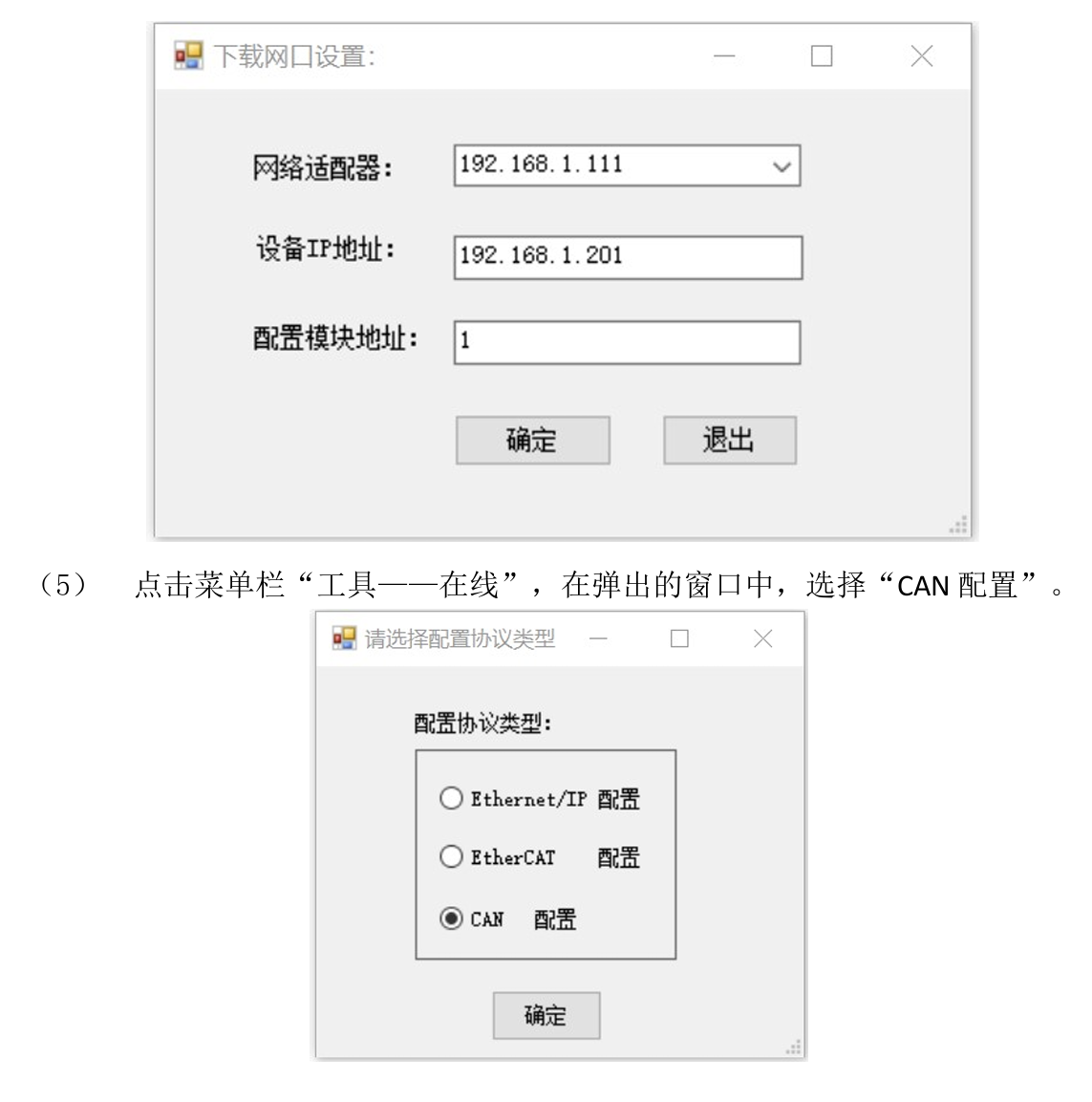
(4) 打開 GW Config 軟件,首先設置軟件使用的 IP 地址,點擊菜單欄“設
置— —通訊設置——以太網設置”,如下圖,電腦的 IP 是
192.168.1.111。(設備 IP 地址和配置模塊地址不需要設置)
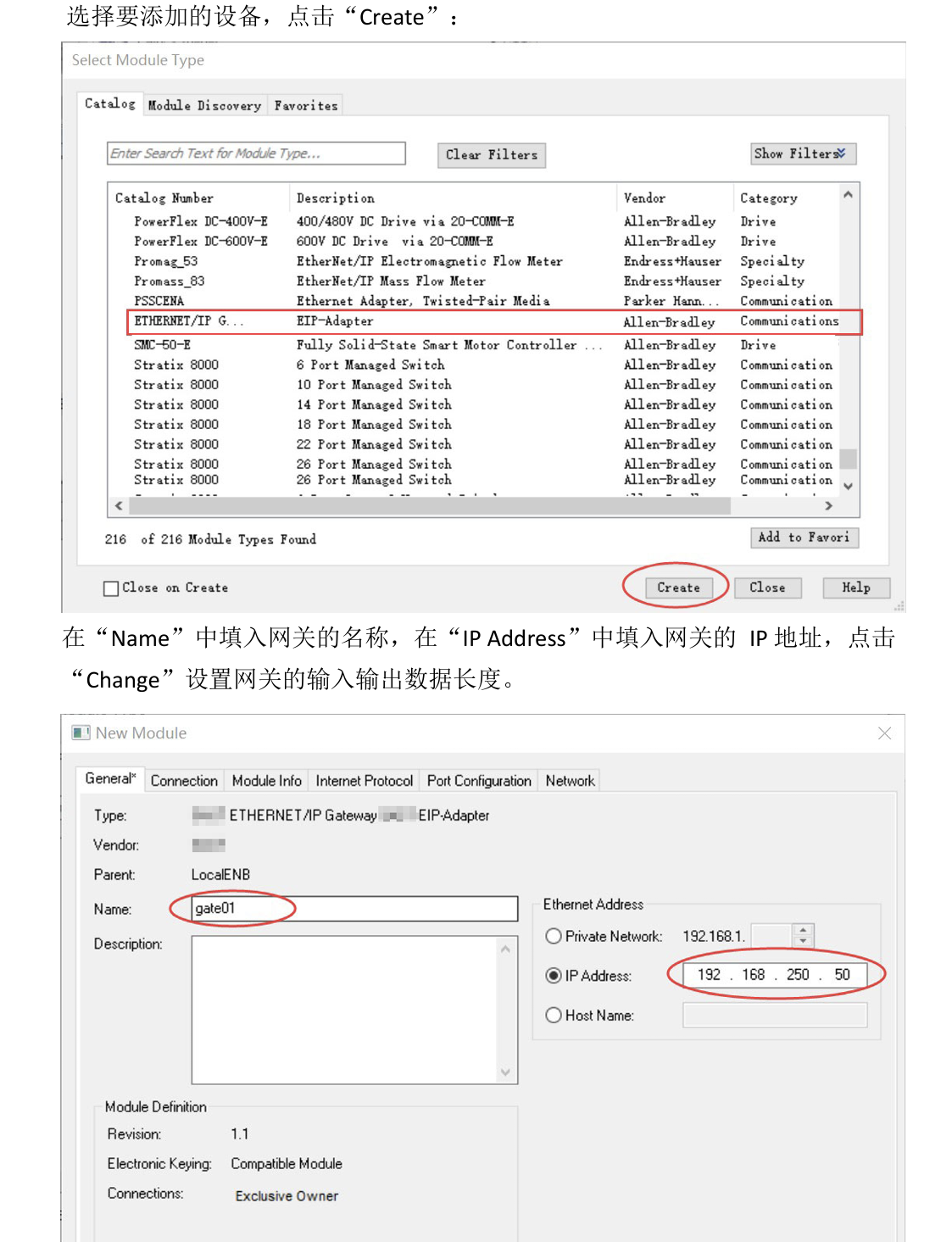
配置網關的 ETHERNET/IP 地址
(1) 使用網線將電腦與網關相應的網口連接。
(2) 將撥碼的第 8 位撥到 ON,此時網關處于配置狀態,然后給網關供電。
(3) 網關處于配置狀態時,此時網口使用 192.168.1.201 的 IP 地址,應使電
腦的 IP 網段設置于 192.168.1.xxx 。
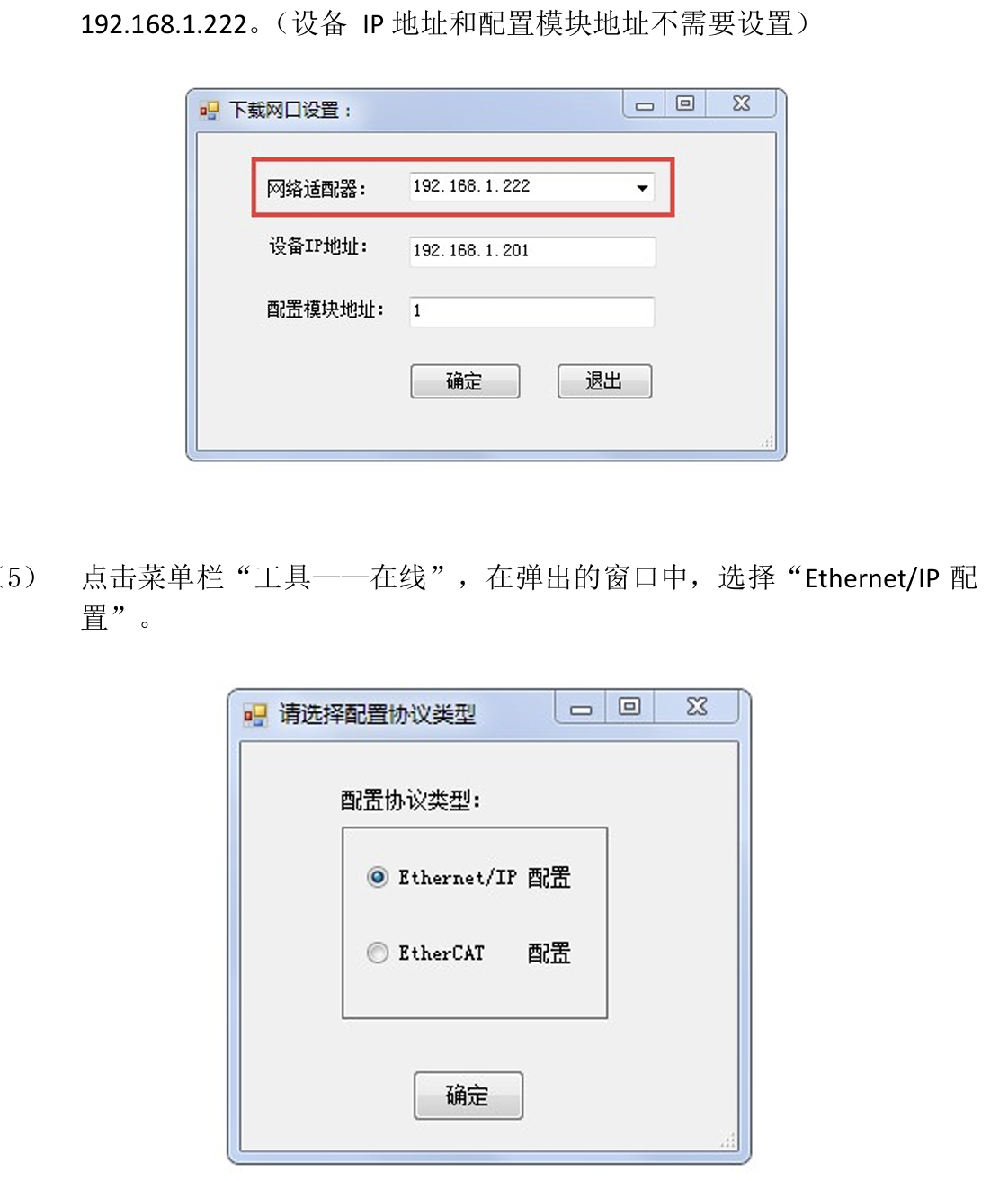
(4) 打開 GW Modbus Bulider 軟件,首先設置軟件使用的 IP 地址,點擊菜單
欄“設置— —通訊設置——以太網設置”,如下圖,電腦的 IP 是
192.168.1.222。(設備 IP 地址和配置模塊地址不需要設置)
應用效果與拓展
該方案通過特米特Ethernet/IP轉CAN網關模塊(JM-EIP-CAN)實現了 AB PLC 與 CANopen 編碼器的無縫通訊,解決了不同協議間的兼容性問題。系統運行穩定,數據傳輸延遲≤15ms,適用于數控機床、機器人分揀等高精度場景。若需擴展,可通過同一網關接入多臺 CANopen 設備(如伺服驅動器),進一步簡化工業網絡架構。
總結:捷米Ethernet/IP轉CAN網關模塊技術在工業自動化協議轉換中具有高兼容性與實時性,通過合理的硬件選型與參數配置,可高效實現 AB PLC 與編碼器等設備的跨協議通訊,為復雜產線的集成提供可靠解決方案。
審核編輯 黃宇
-
編碼器
+關注
關注
45文章
4002瀏覽量
143209 -
CAN
+關注
關注
59文章
3087瀏覽量
473275 -
網關
+關注
關注
9文章
6898瀏覽量
56514 -
Ethernet
+關注
關注
3文章
671瀏覽量
58214
發布評論請先 登錄

疆鴻智能ETHERNET IP轉MODBUS讓羅克韋爾PLC和編碼器輕松對話

老舊產線不淘汰,數據孤島輕松破:EtherNet/IP與DeviceNet協議轉換實戰

Ethernet/IP轉ProfiNet網關:匯川PLC與伺服電機通訊最佳配置方案
采用MT6835絕對式磁編碼器實現高精度閉環步進電機控制
集成MT6816磁性角度編碼器實現伺服電機緊湊型非接觸位置傳感
MT6816高速磁性角度編碼器芯片賦能高性能伺服電機動態響應
MT6835:高速磁編碼技術賦能下一代伺服電機閉環控制
如何實現羅克韋爾PLC與和利時伺服電機通訊-EtherCAT轉EtherNet/IP
閥門拉手傳感器,Ethernetip轉canopen網關解決AB-PLC的冷門用法


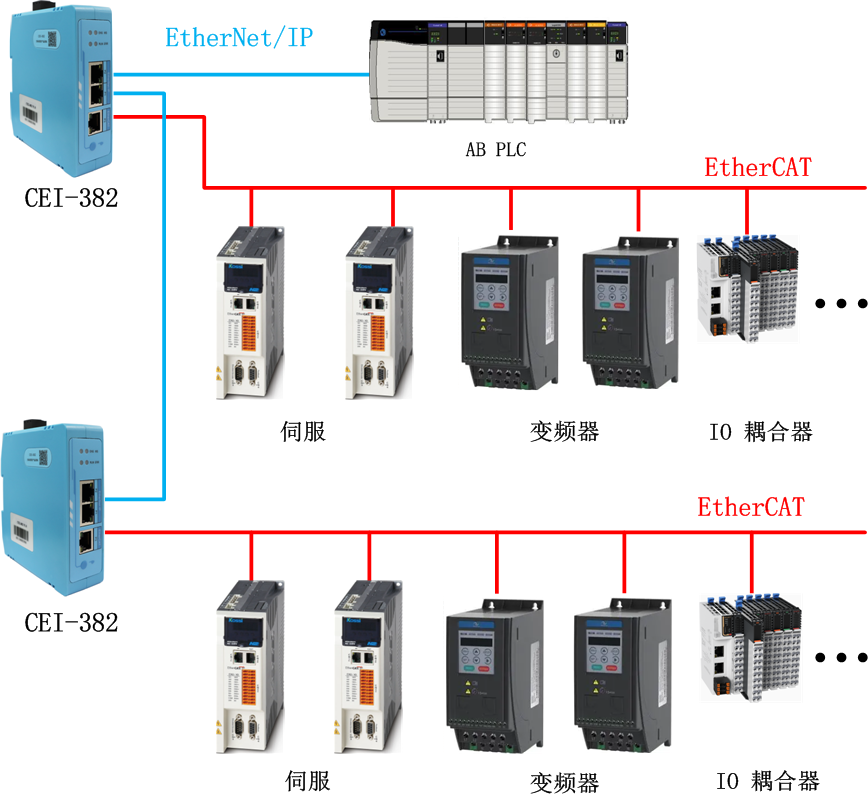
EtherCAT轉EtherNet/IP網關CEI-382實現羅克韋爾PLC與和利時伺服電機通訊



 工商網監
工商網監
評論