本文主要介紹了TMS320F28027與L298N的懸掛運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)。以TMS320F28027為控制芯片,利用L298N驅(qū)動(dòng)兩個(gè)步進(jìn)電機(jī)。步進(jìn)電機(jī)采用42HS4813A4,其額定電流為1.3A
2018-02-26 09:40:31 4835
4835 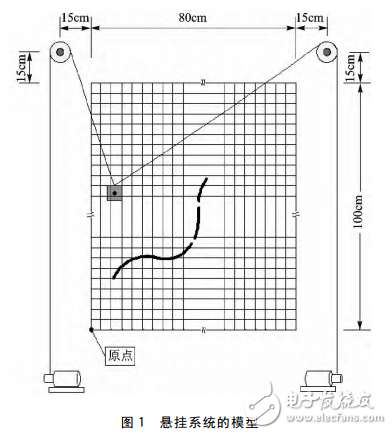
DSP與FPGA設(shè)計(jì)的跟蹤伺服運(yùn)動(dòng)控制技術(shù)
摘 要: 在分析光電跟蹤伺服系統(tǒng)特點(diǎn)的基礎(chǔ)上,以TI公司DSP芯片TMS320F2812作為主控制芯片,采用FPGA進(jìn)行邏
2010-05-15 18:22:521934 
由于DSP將超強(qiáng)的高速實(shí)時(shí)處理能力和豐富的外設(shè)功能集于一身,目前,以DSP為核心的嵌入式運(yùn)動(dòng)控制器已經(jīng)成為開放式運(yùn)動(dòng)控制器的發(fā)展主流,并獲得廣泛的應(yīng)用。本文通過 對(duì)運(yùn)動(dòng)控制
2011-10-24 16:09:543189 
電機(jī)的運(yùn)動(dòng)需要較大的電流,這取決于電機(jī)本身和負(fù)載,所以通常需要驅(qū)動(dòng)芯片。而且驅(qū)動(dòng)芯片可以實(shí)現(xiàn)許多附加的功能,包括細(xì)分、休眠、保護(hù)等。本次采用的是DRV8825驅(qū)動(dòng)芯片模塊。
2020-09-09 16:49:0811984 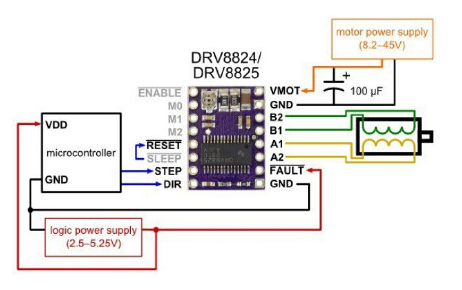
電子發(fā)燒友網(wǎng)報(bào)道(文/黃山明)電機(jī)驅(qū)動(dòng)芯片是一種專門用于控制電機(jī)的芯片,通過對(duì)驅(qū)動(dòng)器進(jìn)行控制,可實(shí)現(xiàn)電機(jī)的轉(zhuǎn)動(dòng)方向、速度和運(yùn)動(dòng)方式等多種控制模式。智能家居中,電機(jī)驅(qū)動(dòng)芯片也被廣泛應(yīng)用于控制電動(dòng)窗
2023-05-22 00:03:005278 想請(qǐng)問下DSP28335是否能夠控制伺服電機(jī),是松下的交流伺服電機(jī),有配套的驅(qū)動(dòng)器,如果有做過類似控制的前輩,希望能分享下經(jīng)驗(yàn)或者資料,謝謝了!
2017-01-07 16:50:38
新手求教dsp問題,現(xiàn)在電機(jī)控制(調(diào)速)的dsp芯片有哪些,我知道有2812,2047,28335,看資料28335好些,我想知道哪款芯片最常用或者以后的趨勢(shì),跟其他控制芯片相比有什么優(yōu)缺點(diǎn),電機(jī)控制領(lǐng)域dsp占什么地位。
2014-08-02 09:51:50
懸掛運(yùn)動(dòng)控制系統(tǒng)代碼分享~
2015-05-29 21:08:13
運(yùn)動(dòng)控制卡設(shè)置點(diǎn)位運(yùn)動(dòng)參數(shù)中平滑時(shí)間參數(shù)的作用是什么?
2022-04-26 11:46:41
及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。本文深刻探討了運(yùn)動(dòng)控制器是如何進(jìn)行設(shè)計(jì)的?
2019-07-31 08:15:26
本帖最后由 2660794397 于 2021-6-18 16:56 編輯
我個(gè)人了解的 HX28034,DSP 芯片有用于電機(jī)控制方向,硬件加速模塊,協(xié)處理器,ADC方面 以及圖形圖像處理、數(shù)字信號(hào)處理、工業(yè)控制及電機(jī)驅(qū)動(dòng)、數(shù)字電源、運(yùn)動(dòng)控制等領(lǐng)域。
2021-06-18 16:19:48
亮點(diǎn)與特色:驅(qū)控一體(集成了控制器、預(yù)驅(qū)動(dòng)器),外擴(kuò)功率管;超靜音、防抖動(dòng)、不丟步、防過沖;力矩隨速度動(dòng)態(tài)調(diào)整;電流隨負(fù)載控制(節(jié)能75%)概況與特性:TMC5160將強(qiáng)大的步進(jìn)電機(jī)驅(qū)動(dòng)器和運(yùn)動(dòng)
2020-03-28 10:56:21
驅(qū)動(dòng)程序一點(diǎn)也不復(fù)雜;德國(guó)TRINAMIC是全球嵌入式電機(jī)運(yùn)動(dòng)控制領(lǐng)導(dǎo)品牌,在設(shè)計(jì)和研發(fā)運(yùn)動(dòng)控制芯片,模塊,機(jī)電一體化產(chǎn)品具有20多年經(jīng)驗(yàn)。TMC將微步操作與先進(jìn)的電流斬波器和電壓斬波器相結(jié)合,允許步進(jìn)
2022-09-02 16:44:29
全球領(lǐng)先的電機(jī)及運(yùn)動(dòng)控制開發(fā)商TRINAMIC近日發(fā)布了一款業(yè)內(nèi)最低成本的單軸運(yùn)動(dòng)控制芯片,該全新的TMC4210運(yùn)動(dòng)控制芯片可完成步進(jìn)電機(jī)的所有實(shí)時(shí)定位和速度計(jì)算,簡(jiǎn)化了電機(jī)控制系統(tǒng)中的主單片機(jī)
2013-09-03 17:08:01
CANopen和電機(jī)通信、編寫電機(jī)驅(qū)動(dòng)、電機(jī)S曲線加減速運(yùn)動(dòng)控制 ④基于目前的板卡硬件環(huán)境編寫方案和實(shí)施計(jì)劃 ⑤項(xiàng)目實(shí)施,功能驗(yàn)證,穩(wěn)定性測(cè)試 ⑥分享成果
2018-01-22 10:32:40
一步在課余時(shí)間學(xué)習(xí)DSP的知識(shí)項(xiàng)目描述:① 利用DSP的事件管理器產(chǎn)生一路PWM接入驅(qū)動(dòng)箱,控制電機(jī); ② 利用按鍵檢測(cè)控制電機(jī),一個(gè)按鍵控制電機(jī)正轉(zhuǎn)和反轉(zhuǎn)(按鍵一次改變電機(jī)轉(zhuǎn)向),另一個(gè)按鍵控制電機(jī)
2015-09-10 11:20:00
、BOM表和Gerber都已經(jīng)分享到了論壇版塊 電機(jī)驅(qū)動(dòng)器是由分立元器件H橋搭起來的,沒有采用半橋驅(qū)動(dòng)芯片如IR2101等芯片,使用三極管搭建的并有一定的硬件死區(qū)作用;我覺得做H橋驅(qū)動(dòng)器最重要的就是上橋臂
2020-09-09 11:32:47
劃分和詳細(xì)的設(shè)計(jì)。1 系統(tǒng)硬件結(jié)構(gòu)驅(qū)動(dòng)控制器采用DSP+ARM的結(jié)構(gòu),與信號(hào)采集電路和功率驅(qū)動(dòng)電路配合共同完成音圈電機(jī)的驅(qū)動(dòng)控制。選用TI公司的32位浮點(diǎn)型DSP TMS320F28335作為主處理器
2021-11-23 07:00:00
專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念概括步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)化為角位移或線位移的電磁機(jī)械裝置。步進(jìn)電機(jī)的穩(wěn)定性和可靠性直接影響到工業(yè)控制領(lǐng)域的精度,特別是在點(diǎn)膠點(diǎn)焊等高精度運(yùn)動(dòng)控制系統(tǒng)中,對(duì)于步進(jìn)電機(jī)的精度和穩(wěn)定性要求更高。所以說,對(duì)于步進(jìn)電機(jī)控制
2021-09-07 08:21:11
基于32位DSP及電機(jī)驅(qū)動(dòng)芯片的懸掛運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
2021-03-08 07:27:43
OUT、DIR向電機(jī)驅(qū)動(dòng)器發(fā)出連續(xù)的加減速脈沖控制,控制電機(jī)做指定的運(yùn)動(dòng)。微處理器與HMC8033運(yùn)動(dòng)控制芯片接口示意圖:以STM32F103單片機(jī)為例開發(fā)一款運(yùn)動(dòng)控制器,硬件方面將運(yùn)動(dòng)控制芯片的控制
2020-04-15 14:35:51
數(shù)控系統(tǒng)的發(fā)展趨勢(shì)。本運(yùn)動(dòng)控制器采用TI公司的高性能浮點(diǎn)DSP作為主控芯片,通過ISA接口與PC協(xié)調(diào)并進(jìn)行數(shù)據(jù)交換,以PC計(jì)算機(jī)作為基本平臺(tái),以DSP高速運(yùn)動(dòng)控制卡作細(xì)插補(bǔ)、伺服控制的核心,對(duì)直線電機(jī)的運(yùn)動(dòng)進(jìn)行控制,取得了良好的實(shí)際應(yīng)用效果。
2019-06-18 06:39:25
數(shù)控系統(tǒng)的發(fā)展趨勢(shì)。本運(yùn)動(dòng)控制器采用TI公司的高性能浮點(diǎn)DSP作為主控芯片,通過ISA接口與PC協(xié)調(diào)并進(jìn)行數(shù)據(jù)交換,以PC計(jì)算機(jī)作為基本平臺(tái),以DSP高速運(yùn)動(dòng)控制卡作細(xì)插補(bǔ)、伺服控制的核心,對(duì)直線電機(jī)的運(yùn)動(dòng)進(jìn)行控制,取得了良好的實(shí)際應(yīng)用效果。
2019-06-18 08:13:08
通用型運(yùn)動(dòng)控制器。其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。本文對(duì)該運(yùn)動(dòng)
2009-09-19 09:43:00
RT,我想做labview的電機(jī)控制,兩者中間通過運(yùn)動(dòng)控制卡。然后我的電機(jī)的每個(gè)時(shí)刻的轉(zhuǎn)角位置已經(jīng)導(dǎo)入txt格式的文本中,,那么這個(gè)程序該怎么寫啊?求大神回復(fù)
2015-04-26 23:16:35
我想用pmac控制電機(jī)運(yùn)動(dòng),pmac與labview通信,并通過labview實(shí)時(shí)顯示電機(jī)運(yùn)動(dòng)狀況,請(qǐng)問labview中如何采集信號(hào)?采集到的信號(hào)我想以波形圖的形式輸出并進(jìn)行分析
2017-05-09 16:05:49
您好!我現(xiàn)在要設(shè)計(jì)基于u***總線與dsp2812開發(fā)運(yùn)動(dòng)控制卡,但u***專用芯片cy7c68013A是16位的,dsp2812是32位的,需不需要一個(gè)協(xié)議什么的東西,或者相關(guān)的一些資料,謝謝!
2020-06-10 16:56:48
以凌陽16位單片機(jī)SPCE061A為控制核心,通過所需運(yùn)動(dòng)軌跡曲線的參數(shù)方程建立運(yùn)動(dòng)控制模型,按照算法對(duì)兩組驅(qū)動(dòng)步進(jìn)電機(jī)進(jìn)行控制,實(shí)現(xiàn)了懸掛畫筆在給定的范圍內(nèi)的定點(diǎn)運(yùn)動(dòng)、任意曲線運(yùn)動(dòng)以及圓心可任意設(shè)定的圓周運(yùn)動(dòng)等功能,不僅完成了要求發(fā)揮的部分功能,同時(shí)還增加了語音播放功能。
2011-03-07 16:00:00
初始點(diǎn)A的坐標(biāo)由鍵盤輸入,初始時(shí)刻安裝紅外探頭,由微型步進(jìn)電機(jī)控制的搖臂處于水平位置。系統(tǒng)啟動(dòng)后,微型步進(jìn)電機(jī)驅(qū)動(dòng)搖臂順時(shí)針旋轉(zhuǎn),最大轉(zhuǎn)角為180°。紅外探頭的運(yùn)動(dòng)軌跡與黑色圓弧會(huì)有一個(gè)交點(diǎn)B,并記錄
2011-08-19 09:50:42
如何使用運(yùn)動(dòng)控制卡控制電機(jī)轉(zhuǎn)動(dòng)?
2021-10-29 07:38:38
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
如何實(shí)現(xiàn)基于STM32F103懸掛運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)?
2021-12-23 06:47:52
電機(jī)作為各種電器和機(jī)械的動(dòng)力源,無論在工業(yè)應(yīng)用還是個(gè)人項(xiàng)目上,幾乎每位工程師和電子愛好者都會(huì)接觸,可謂小電機(jī)大作用,今天我們就一起聊聊電機(jī)運(yùn)動(dòng)控制算法。一、DSP與TI為什么提到電機(jī)控制很多人首先
2018-10-10 18:09:41
在現(xiàn)代的工業(yè)控制、車輛運(yùn)動(dòng)和醫(yī)療設(shè)備等系統(tǒng)中,懸掛運(yùn)動(dòng)系統(tǒng)的應(yīng)用越來越多,在這些系統(tǒng)中懸掛運(yùn)動(dòng)部件通常是具體的執(zhí)行機(jī)構(gòu),因而懸掛部件的運(yùn)動(dòng)精確性是整個(gè)系統(tǒng)工作效能的決定因素,而在實(shí)際中實(shí)現(xiàn)懸掛運(yùn)動(dòng)
2019-08-12 08:21:38
本文采用Verilog FPGA設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語言編程實(shí)現(xiàn)的控制算法,驅(qū)動(dòng)步進(jìn)電機(jī),對(duì)懸掛運(yùn)動(dòng)物體進(jìn)行精確的控制。
2021-05-06 07:11:03
怎樣通過運(yùn)動(dòng)懸掛系統(tǒng)去控制兩個(gè)步進(jìn)電機(jī)呢?其具體代碼該如何去實(shí)現(xiàn)呢?
2021-12-21 07:43:29
搞電機(jī)控制、運(yùn)動(dòng)控制現(xiàn)在是使用SMT32的多嗎?還是用C2000的DSP的多? 分享| 1 分鐘前用哪個(gè)有前途?單片機(jī)51比較熟悉,2407和2812有接觸和簡(jiǎn)單使用。想搞電機(jī)控制、運(yùn)動(dòng)控制,該深入2812和 28335還是轉(zhuǎn)STM32?謝謝指點(diǎn)!
2016-03-06 18:40:47
介紹了三種基于DSP的無線運(yùn)動(dòng)控制方法, 無線接受器接收遙控器發(fā)射器的控制指令,將指令傳送到DSP2407主控板處理,根據(jù)控制指令用PWM 波控制兩個(gè)電機(jī)協(xié)調(diào)運(yùn)轉(zhuǎn)。關(guān)鍵詞:DSP
2009-03-30 22:10:36 15
15 美國(guó)國(guó)家半導(dǎo)體公司生產(chǎn)的運(yùn)動(dòng)控制芯片LM628帶有 16位參數(shù)的可編程數(shù)字 PID 控制器 ,具有速度和位置兩種控制模式,可應(yīng)用于使用DC 電機(jī)、無刷DC伺服電機(jī)以及其它可提供增量位置反
2009-04-22 13:59:1860 使用 32 位 Arm? Cortex?-M3 微控制器,專為電機(jī)控制應(yīng)用開發(fā),具備三角函數(shù)和長(zhǎng)整數(shù)除法運(yùn)算輔助功能單元,可加速電機(jī)控制應(yīng)用中的常用計(jì)算功能,支持
2022-09-21 16:18:57
本文主要介紹了基于PCI 總線的以多單片機(jī)和DSP 為控制芯片的多軸運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì),主要包括其硬件方面的設(shè)計(jì)。詳細(xì)的介紹了運(yùn)動(dòng)控制卡和接口卡的各個(gè)模塊功能電路,包
2009-06-04 09:27:5222 基于MCU和DSP的運(yùn)動(dòng)控制系統(tǒng)由于結(jié)構(gòu)緊湊、環(huán)境適應(yīng)性好而有良好的發(fā)展前景。由于PC機(jī)與MCU和DSP資源環(huán)境差異較大,進(jìn)行MCU和DSP環(huán)境中的運(yùn)動(dòng)控制技術(shù)研究十分必要。基于MCU和DSP的
2009-09-23 11:13:5611 為了滿足CNC齒輪測(cè)量中心的測(cè)量精要求,針對(duì)定點(diǎn)數(shù)字信號(hào)處理器(DSP)TMS320LF2407A的特點(diǎn),設(shè)計(jì)一種以DSP運(yùn)動(dòng)控制為核心的運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)通過DSP內(nèi)部集成的A/D轉(zhuǎn)換模塊對(duì)傳
2010-02-11 12:23:3379 數(shù)字信號(hào)處理芯片TMS320F240是針對(duì)電機(jī)、運(yùn)動(dòng)控制的專用DSP控制器。利用控制器DSP(TMS320F240)實(shí)現(xiàn)感應(yīng)電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)的全數(shù)字化,對(duì)控制系統(tǒng)的硬件包括外圍接口進(jìn)行了設(shè)計(jì)
2010-07-20 15:51:1423 步進(jìn)電機(jī)驅(qū)動(dòng)芯片有:步進(jìn)電機(jī)驅(qū)動(dòng)芯片(UM12017、UM12014)完全代替VID6606、VID6608)
還有
2008-08-29 12:32:332280 采用DSP和CAN的電機(jī)同步控制系統(tǒng)與通信
0 引言傳統(tǒng)的多電機(jī)控制系統(tǒng)適用于要求不高、相對(duì)簡(jiǎn)單、電機(jī)分布比較集中的場(chǎng)合。而對(duì)于運(yùn)動(dòng)控制中實(shí)時(shí)性、可靠性
2009-11-02 15:13:451257 
基于DSP的運(yùn)動(dòng)控制器的開發(fā)
運(yùn)動(dòng)控制器是一種用于多種運(yùn)動(dòng)控制場(chǎng)合的上位控制單元,通常采用專業(yè)運(yùn)動(dòng)控制芯片或高速DSP來控制步進(jìn)電機(jī)或伺服電機(jī)。運(yùn)動(dòng)控制器
2009-12-25 09:44:072332 
本文在硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無刷直流電機(jī)
2010-07-09 11:06:501371 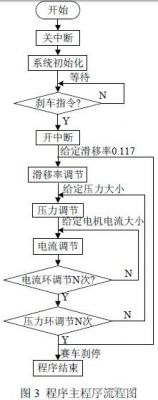
摘要:針對(duì)數(shù)控系統(tǒng)的工作特點(diǎn)和要求,通過對(duì)TI公司新推出的DSP芯片TMS320F2812和ALTERA公司的FPGA芯片EP1K30功能和特點(diǎn)的深入分析,給出了一種基于DSP和FPGA的運(yùn)動(dòng)控制卡的設(shè)計(jì)與實(shí)現(xiàn)。在充分考慮上述芯片特點(diǎn)和資源的基礎(chǔ)上,該卡采用DSP和FPGA取代單片機(jī)
2011-02-27 13:29:19106 步進(jìn)電機(jī)控制芯片TC1002 是一個(gè)高性能二相步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制器。TC1002支持14 種細(xì)分等級(jí),最大256細(xì)分,最大支持4.2A和8.0A電流.....步進(jìn)電機(jī)控制芯片TC1002的應(yīng)用驅(qū)動(dòng)電路如下,上面這種應(yīng)用是
2011-07-27 18:33:1812806 
懸掛軌跡控制系統(tǒng)是一電機(jī)控制系統(tǒng)。為滿足控制需要,本系統(tǒng)采用 AT89S51 單片機(jī)作為核心器件,多圈電位器為物體位置數(shù)據(jù)采集器件,以L298驅(qū)動(dòng)的直流電機(jī)為執(zhí)行設(shè)備,鍵盤和LED顯示
2011-08-08 16:21:5759 為了降低研發(fā)成本,減輕微控制器的壓力,提高系統(tǒng)的穩(wěn)定性和靈活性,提出了一種基于專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)方案。該運(yùn)動(dòng)控制系統(tǒng)中主要采用了微控制器AT90CA
2012-05-30 15:08:3157 設(shè)計(jì)了一種基于DSP與FPGA的運(yùn)動(dòng)控制器。該控制器以DSP為控制核心,用FPGA構(gòu)建運(yùn)動(dòng)控制器與傳感器以及電機(jī)驅(qū)動(dòng)器的接口電路。充分發(fā)揮了DSP強(qiáng)大的運(yùn)算能力和FPGA的并行處理能力。具有
2012-10-26 15:21:5193 分析了運(yùn)動(dòng)控制器對(duì)機(jī)器人的重要性;提出了一種高性能的基于DSP芯片的運(yùn)動(dòng)控制器的整體設(shè)計(jì)方案,該控制器集控制電路、數(shù)據(jù)采集模塊和驅(qū)動(dòng)電路于一體,能夠很好的完成機(jī)器人運(yùn)
2013-05-27 17:16:2577 基于DSP電機(jī)控制應(yīng)用釋疑,好資料,要貴。
2016-01-06 14:32:064 基于DSP的永磁平面電機(jī)運(yùn)動(dòng)控制系統(tǒng)研究,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-26 18:16:4218 懸掛運(yùn)動(dòng)控制系統(tǒng)資料,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-28 11:59:1428 采用DSP和FPGA直驅(qū)閥用音圈電機(jī)驅(qū)動(dòng)控制系統(tǒng)。
2016-05-04 14:37:0119 基于DSP與FPGA的運(yùn)動(dòng)控制器設(shè)計(jì),下來看看。
2016-05-10 11:24:3332 本系統(tǒng)采用凌陽16位單片機(jī)SPCE061A作為控制中心,由直流步進(jìn)電機(jī)、紅外收發(fā)對(duì)管、4*4鍵盤及中文液晶顯示屏構(gòu)成的懸掛運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)能自由控制懸掛物體完成自行設(shè)定運(yùn)動(dòng)、畫圓運(yùn)動(dòng)、沿黑線運(yùn)動(dòng)等,并能正確顯示物體到達(dá)的坐標(biāo)位置。
2016-10-12 14:57:5415 TMS320F28027是一款32位的DSP,具有運(yùn)算速度快、穩(wěn)定性高的優(yōu)點(diǎn)。本文利用TMS320F28027控制兩個(gè)步進(jìn)電機(jī),從而使物體在平面內(nèi)運(yùn)動(dòng),實(shí)現(xiàn)物體在平面內(nèi)可以任意地畫指定的曲線和圓等。
2016-12-15 16:45:267 PLC及變頻器在懸掛輸送鏈電機(jī)同步控制中的應(yīng)用
2017-08-31 09:53:429 設(shè)計(jì)一電機(jī)控制系統(tǒng),控制物體在傾斜(仰角100 度)的板上運(yùn)動(dòng)。在一白色底板上固定兩個(gè)滑輪,兩只電機(jī)(固定在板上)通過穿過滑輪的吊繩控制一物體在板上運(yùn)動(dòng),運(yùn)動(dòng)范圍為 80cm100cm。物體的形狀
2017-09-11 17:40:1914 設(shè)計(jì)了一種基于DSP 和FPGA 的四軸伺服電機(jī)運(yùn)動(dòng)控制器,該控制器選用DSP 與FPGA 作為核心部件。針對(duì)運(yùn)動(dòng)控制中的一些具體問題,如高速、高精度、實(shí)時(shí)控制等,規(guī)劃了DSP 的功能擴(kuò)展,在
2017-09-21 11:24:5210 運(yùn)動(dòng)控制芯片AFD-X05是基FPGA實(shí)現(xiàn)的芯片,能夠完成高速高精度的數(shù)控加工。其運(yùn)動(dòng)控制的穩(wěn)定性和可靠性要比DSP系統(tǒng)或基于DSP技術(shù)的運(yùn)動(dòng)控制芯片如MCX314等要高一個(gè)等級(jí)。
2017-09-25 17:49:3536 MCU和DSP的運(yùn)動(dòng)控制研究硬件平臺(tái)設(shè)計(jì)
2017-10-19 13:20:096 DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
2017-10-19 14:58:4212 近年來,隨著現(xiàn)代電機(jī)控制技術(shù)的發(fā)展和電機(jī)驅(qū)動(dòng)系統(tǒng)市場(chǎng)的繁榮,AD公司推出了ADMCxx系列電機(jī)控制嵌入式DSP。其中的ADMC401屬于高端產(chǎn)品,適合于工業(yè)控制、機(jī)床控制等高精度應(yīng)用。目前有一定
2017-10-24 16:37:296 1 運(yùn)動(dòng)控制器硬件結(jié)構(gòu) 本運(yùn)動(dòng)控制器的硬件結(jié)構(gòu)主要分為如下幾個(gè)模塊:DSP+CPLD 主控模塊,包括 DSP 核心 模塊和 CPLD 驅(qū)動(dòng)與擴(kuò)展模塊;通信接口模塊,包括 PCI 總線、USB 總線
2017-11-03 10:30:472 用于電機(jī)控制的16 位定點(diǎn)DSP芯片DSP56F805設(shè)計(jì)了三相(6/4)SRM雙閉環(huán)驅(qū)動(dòng)系統(tǒng)。該芯片指令執(zhí)行速度快,資源豐富,為高性能的開關(guān)磁阻電機(jī)的控制提供了可靠的信息處理與控制。 1.SRM驅(qū)動(dòng)
2017-11-06 14:55:4714 。基于ARM與DSP運(yùn)動(dòng)控制芯片相結(jié)合的新一代運(yùn)動(dòng)控制系統(tǒng),充分發(fā)揮ARM微控器與專業(yè)運(yùn)動(dòng)控制芯片MCX314As的各自特點(diǎn),可方便的構(gòu)成高性能的嵌入式運(yùn)動(dòng)控制系統(tǒng)。
2018-06-24 08:12:008060 
本文介紹了直流電機(jī)的IR2110驅(qū)動(dòng)控制設(shè)計(jì)及DSP實(shí)現(xiàn),采用功率MOSFET芯片IRF530作為開關(guān)元件,IR2110作為MOSFET的柵極驅(qū)動(dòng)控制,用DSP產(chǎn)生PWM信號(hào)并通過光耦及邏輯控制送至IR2110。該控制達(dá)到了很好的效果,具有較高使用價(jià)值。
2017-12-21 13:49:5919399 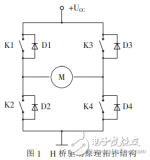
在現(xiàn)代的工業(yè)控制、車輛運(yùn)動(dòng)和醫(yī)療設(shè)備等系統(tǒng)中,懸掛運(yùn)動(dòng)系統(tǒng)的應(yīng)用越來越多,在這些系統(tǒng)中懸掛運(yùn)動(dòng)部件通常是具體的執(zhí)行機(jī)構(gòu),因而懸掛部件的運(yùn)動(dòng)精確性是整個(gè)系統(tǒng)工作效能的決定因素,而在實(shí)際中實(shí)現(xiàn)懸掛運(yùn)動(dòng)控制系統(tǒng)的精確控制是非常困難的。
2019-07-29 08:02:002705 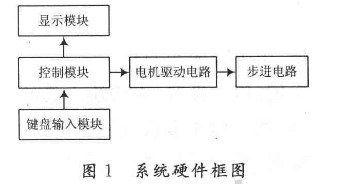
懸掛軌跡控制系統(tǒng)是一電機(jī)控制系統(tǒng), 控制物體在 80cm×100cm的范圍內(nèi)作直線、圓、尋跡等運(yùn)動(dòng),并且在運(yùn)動(dòng)時(shí)能顯示運(yùn)動(dòng)物體的坐標(biāo)。 設(shè)計(jì)采用 STC89C52 單片機(jī)作為核心器件實(shí)現(xiàn)對(duì)物體運(yùn)動(dòng)
2019-05-05 08:00:006 本文開發(fā)的開放式運(yùn)動(dòng)控制器以PC機(jī)為平臺(tái),完成坐標(biāo)變換、軌跡規(guī)劃、粗插補(bǔ)運(yùn)算等控制指令的設(shè)置和發(fā)送,同時(shí)可以實(shí)時(shí)顯示當(dāng)前伺服系統(tǒng)的運(yùn)動(dòng)位置、速度和電機(jī)狀態(tài)等參數(shù)。運(yùn)動(dòng)控制器以DSP芯片作為核心處理器
2020-09-23 08:44:002041 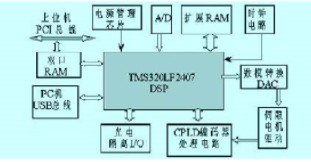
的研究,取得了系列的研究成果。現(xiàn)在超聲電機(jī)研究的主要方向?yàn)椋盒碌某?b class="flag-6" style="color: red">電機(jī)運(yùn)動(dòng)機(jī)理的研究:大力矩超聲電機(jī)的研究:超聲電機(jī)的微型化;超聲電機(jī)的驅(qū)動(dòng)、控制問題。本文就是對(duì)超聲電機(jī)的驅(qū)動(dòng)、控制問題進(jìn)行了研究由于現(xiàn)在研究出的
2021-05-19 10:00:1514 什么是電機(jī)驅(qū)動(dòng)芯片和電機(jī)驅(qū)動(dòng)模塊? 電機(jī)驅(qū)動(dòng)芯片是集成有CMOS 控制電路和DMOS 功率器件的芯片,利用它可以與主處理器、電機(jī)和增量型編碼器構(gòu)成一個(gè)完整的運(yùn)動(dòng)控制系統(tǒng)。可以用來驅(qū)動(dòng)直流電機(jī)、步進(jìn)
2021-07-18 14:46:4419554 電機(jī)驅(qū)動(dòng)芯片是集成有CMOS 控制電路和DMOS 功率器件的芯片,利用它可以與主處理器、電機(jī)和增量型編碼器構(gòu)成一個(gè)完整的運(yùn)動(dòng)控制系統(tǒng)。可以用來驅(qū)動(dòng)直流電機(jī)、步進(jìn)電機(jī)和繼電器等感性負(fù)載。
2022-02-25 15:35:5716380 DSP、電機(jī)控制
2022-03-02 15:28:4499 的IC。 MCX514是一款既能與8/16位、16位數(shù)據(jù)總線接口也能與I2C串行數(shù)據(jù)總線接口的帶插補(bǔ)功能的4軸運(yùn)動(dòng)控制芯片,它能對(duì)脈沖型伺服電機(jī)、步進(jìn)電機(jī)進(jìn)行各軸獨(dú)立定位或速度控制。 可以選擇4軸中任意
2022-03-24 14:34:0012307 型號(hào)TCM260是德國(guó)TRINAMIC公司產(chǎn)的步進(jìn)電機(jī)驅(qū)動(dòng)芯片,綜合性能應(yīng)該是步進(jìn)電機(jī)驅(qū)動(dòng)芯片中排前列的,當(dāng)然價(jià)格也是。TMC260程序上兼容TMC2660、TMC262,其中TMC2660是比較新的型號(hào),驅(qū)動(dòng)電流也比TMC260要大;TMC262是外置mos管,可驅(qū)動(dòng)大功率步進(jìn)電機(jī),如57步進(jìn)電機(jī)等。
2022-07-18 14:36:232660 
運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2022-07-22 09:52:466294 電機(jī)驅(qū)動(dòng)芯片是集成有CMOS控制電路和DMOS功率器件的芯片,利用它可以與主處理器、電機(jī)和增量型編碼器構(gòu)成一個(gè)完整的運(yùn)動(dòng)控制系統(tǒng)。可以用來驅(qū)動(dòng)直流電機(jī)、步進(jìn)電機(jī)和繼電器等感性負(fù)載。
電機(jī)驅(qū)動(dòng)行業(yè)產(chǎn)業(yè)鏈上游主要為半導(dǎo)體材料與半導(dǎo)體設(shè)備,下游應(yīng)用電動(dòng)機(jī)、電子信息制造與機(jī)械機(jī)電等。
2023-03-16 09:28:455 電機(jī)運(yùn)動(dòng)控制解決方案,
包括板級(jí)的集成電路(IC)或微芯片、集成在系統(tǒng)層級(jí)的系統(tǒng)級(jí)模塊(SoM)以及運(yùn)動(dòng)控制器、驅(qū)動(dòng)器、步進(jìn)電機(jī)和BLDC電機(jī)及其各種組合,
在追求電機(jī)運(yùn)動(dòng)控制與性能功耗的道路上堪稱不折不扣的“卷王之王”。
2023-03-17 13:57:301 基于MCU和DSP的運(yùn)動(dòng)控制系統(tǒng)由于結(jié)構(gòu)緊湊、環(huán)境適應(yīng)性好而有良好的發(fā)展前景。由于PC機(jī)與MCU和DSP資源環(huán)境差異較大, 進(jìn)行MCU和DSP環(huán)境中的運(yùn)動(dòng)控制技術(shù)研究十分必要。基于MCU和DSP的運(yùn)動(dòng)控制研究硬件平臺(tái)設(shè)計(jì)遵從運(yùn)動(dòng)控制系統(tǒng)的開放式、可重構(gòu)和網(wǎng)絡(luò)化的發(fā)展方向, 選用主流的M
2023-10-31 17:01:261534 運(yùn)動(dòng)控制卡伺服電機(jī)控制是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中一項(xiàng)重要的技術(shù),它涉及到運(yùn)動(dòng)控制卡、伺服電機(jī)、控制算法等多個(gè)方面。本文將詳細(xì)介紹運(yùn)動(dòng)控制卡伺服電機(jī)的控制原理、控制方法、控制策略以及實(shí)際應(yīng)用等方面的內(nèi)容
2024-06-12 14:13:222028 步進(jìn)電機(jī)驅(qū)動(dòng)芯片是步進(jìn)電機(jī)控制系統(tǒng)中實(shí)現(xiàn)驅(qū)動(dòng)電機(jī)的核心元件。它通過接收外部控制電路提供的控制信號(hào),將其轉(zhuǎn)換為步進(jìn)電機(jī)所需的電流和電壓信號(hào),從而實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)的精確控制。本文旨在詳細(xì)闡述步進(jìn)電機(jī)驅(qū)動(dòng)芯片的工作原理及其特點(diǎn),并結(jié)合相關(guān)數(shù)字信息,為步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)和應(yīng)用提供參考。
2024-06-12 15:14:272961 引言 數(shù)字信號(hào)處理器(Digital Signal Processor,簡(jiǎn)稱DSP)是一種專門為實(shí)時(shí)信號(hào)處理而設(shè)計(jì)的微處理器。在電機(jī)控制領(lǐng)域,DSP被廣泛應(yīng)用于實(shí)現(xiàn)各種復(fù)雜的控制算法,以提高電機(jī)
2024-07-14 11:41:422260
 電子發(fā)燒友App
電子發(fā)燒友App
























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論