 電子發(fā)燒友App
電子發(fā)燒友App



TMC2310 DSP芯片在水下目標(biāo)檢測與參數(shù)估計中的應(yīng)用
介紹了TMC2310芯片的主要特點、功能及其結(jié)構(gòu),給出了采用該芯片的水聲信號處理系統(tǒng)電路原理框圖和軟件設(shè)計流程。該水聲信號處理系統(tǒng)可對水下目標(biāo)進(jìn)行實時高速檢測和參量估計,已在最近幾年進(jìn)行了多次水池試驗。經(jīng)湖上和海上試驗驗證,證明其性能良好、工作穩(wěn)定。現(xiàn)已投入小批量生產(chǎn)。
??? 關(guān)鍵詞: 聲場 檢測與估計 DSP FFT 自適應(yīng)FIR濾波
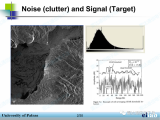
??? 對目標(biāo)進(jìn)行檢測、估計、跟蹤是雷達(dá)與聲納應(yīng)用的最終目的,其任務(wù)是對接收信號進(jìn)行一定的處理、提取特征、分析識別,以檢測目標(biāo)的存在與否,進(jìn)而通過對信號的處理與運(yùn)算估計出目標(biāo)的方位、距離與速度,實現(xiàn)定位和跟蹤。對于水下目標(biāo)的檢測與參量估計有兩種方式:一是對海洋聲場進(jìn)行監(jiān)測,從接收信號中提取目標(biāo)輻射噪聲并進(jìn)行識別與參量估計(即被動方式);二是由聲納系統(tǒng)發(fā)射給定的序列信號(常用的有CW信號和FM信號等),并對接收的回波信號進(jìn)行檢測與參量估計。由于海洋聲場極其復(fù)雜多變,受溫度、鹽度、深度、梯度、水流、水域、季節(jié)、氣候、風(fēng)浪、溫層、流層、界面的反射與折射等諸多因素的影響,使水聲信道相當(dāng)復(fù)雜,接收信號通常會畸變,并淹沒在噪聲之中。對水下目標(biāo)實現(xiàn)實時、快速、準(zhǔn)確、精確地檢測與參量估計是聲納系統(tǒng)不斷追求的目標(biāo)。充分利用高性能的數(shù)字信號處理(DSP)器件及技術(shù)來實現(xiàn)具有良好特性的算法,將會顯著提高檢測目標(biāo)的概率和參量估計的精度,從而推動聲納的發(fā)展與應(yīng)用。
??? 近二十年來,相繼出現(xiàn)了許多重要的目標(biāo)檢測及參數(shù)估計算法,如分裂波束精確測向算法[2]、ARMA法[4]、MUSIC法[5]和ESPRIT法[6]等DOA估計方法,以及LMS算法[7]等自適應(yīng)信號處理方法。這些算法的實現(xiàn),大多需要通過一些通用的數(shù)學(xué)運(yùn)算以及矩陣運(yùn)算,并采用如FFT、IFFT等快速算法,而這些運(yùn)算均可方便地利用TMC2310器件來實現(xiàn)。本文將對TMC2310芯片應(yīng)用于水下目標(biāo)的檢測與估計進(jìn)行介紹。
??? 1 TMC2310簡介
??? TMC2310是美TRW公司生產(chǎn)的高速度(實現(xiàn)一次基二蝶形運(yùn)算僅需100ns)、多功能(共有16種運(yùn)算功能)、可編程的專用數(shù)字信號處理(DSP)器件,其使用靈活、操作方便、性價比高,可廣泛應(yīng)用于雷達(dá)、聲納、通訊及虛擬儀器等領(lǐng)域。
??? 1.1 主要特點????
??? ·可自動或手動地實現(xiàn)浮點塊的溢出調(diào)整
??? ·具有流水線及管道操作兩種尋址方式
??? ·用戶可編程窗函數(shù)功能
??? ·具有片內(nèi)系數(shù)存儲器
??? ·具有兩個算術(shù)運(yùn)算單元
??? ·19bit的運(yùn)算精度及輸出位寬
??? 1.2 主要功能
??? ·可快速完成不加窗及加窗(實數(shù)窗或復(fù)數(shù)窗)的FFT及IFFT算法
??? ·可同時構(gòu)成兩路并行的FIE濾波器(16~1024階)
·可同時構(gòu)成兩路并行的FIE濾波器(16~1024階)
??? ·可構(gòu)成自適應(yīng)FIR濾波器
??? ·可進(jìn)行實數(shù)、復(fù)數(shù)的乘及乘加運(yùn)算
??? ·可進(jìn)行復(fù)數(shù)求模及陣列矢量的平方運(yùn)算
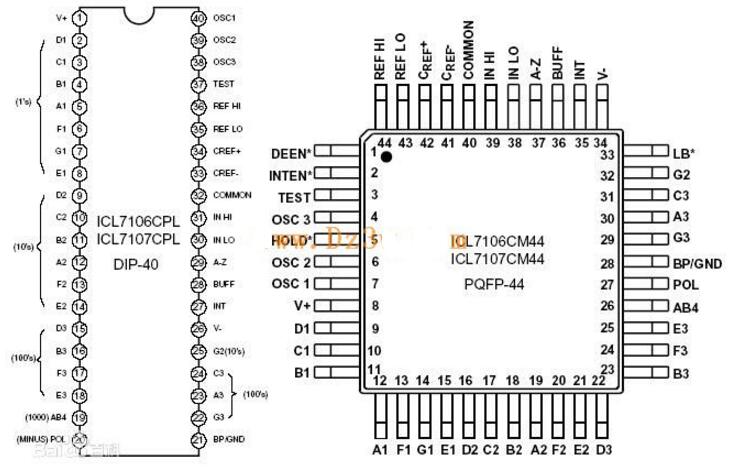
??? 1.3 結(jié)構(gòu)與管腳
??? TMC2310由兩個算術(shù)單元(AE0、AE1)、片內(nèi)系數(shù)ROM、控制邏輯單元和外部接口電路五個主要部分構(gòu)成,其邏輯框圖見圖1。每個算術(shù)單元包括一個乘法序列電路和乘—加算術(shù)邏輯電路塊。該芯片采用了88引腳的PGA封裝形式。
?? 管腳定義如下:
VDD?VSS?? 電源輸入引腳,采用單一+5V供電
CLK??????? 系統(tǒng)時鐘輸入引腳
 ?????? 讀信號,低電平有效
?????? 讀信號,低電平有效
 ?????? 寫信號,低電平有效
?????? 寫信號,低電平有效
SEMSEL???? 外部存儲器選擇信號輸出引腳
SCEN?????? 定標(biāo)輸出允許引腳
DONE?????? 系統(tǒng)工作結(jié)束標(biāo)志輸出引腳
CMD0~CMD1 控制命令輸入引腳
W0~W16??? 雙功能數(shù)據(jù)總線,用于輸入窗函數(shù)、 濾波器系數(shù)及輸出定標(biāo)器的移位指數(shù)和最后一次溢出
AD0~AD9?? 外部數(shù)據(jù)存儲器地址總線
 RG0~RG18? 實部雙向數(shù)據(jù)總線
RG0~RG18? 實部雙向數(shù)據(jù)總線
IM0~I(xiàn)M18? 虛部雙向數(shù)據(jù)總線
??? 1.4 配制寄存器
??? TMC2310片內(nèi)有兩個16bit的配制寄存器(CR1、CR2),用來對TMC2310進(jìn)行編程設(shè)置,其主要用途如下:
CR1 用來設(shè)定芯片的處理功能、轉(zhuǎn)換長度、輸出格式及定標(biāo)方式;
CR2 主要用來設(shè)定尋址方式和變換路數(shù)(1~64路)。
??? 2 電路設(shè)計
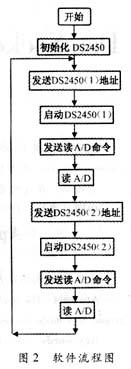
??? 由于TMC2310是可編程的專用DSP器件,我們用一片TMS320C25 DSP器件與之配合,采用主從結(jié)構(gòu)、并行處理方式,加上外圍共享存儲器陣列對等組成處理模塊。TMS320C25除對TMC2310進(jìn)行編程及控制外,還以并行運(yùn)算處理的方式完成一些后續(xù)處理及輔助運(yùn)算(如數(shù)據(jù)抽取、積分等)。整個電路系統(tǒng)采用模塊化設(shè)計,便于調(diào)試及擴(kuò)展。信號處理模塊原理框圖如圖2所示。
??? 在圖2中,TMC2310和TMS320C25之間設(shè)計了一個以乒乓方式工作的雙口RAM陣列,其作用有四:(1)存放待處理的數(shù)據(jù)(實部數(shù)據(jù)放在REM塊,虛部數(shù)據(jù)放在IMM塊);(2)存放TMC2310所需的系數(shù)或參數(shù)(放在WDM塊);(3)存放TMC2310的輸出結(jié)果并作為TMC2310中間結(jié)果緩存;(4)構(gòu)成TMS320C25的運(yùn)算內(nèi)存。為了便于構(gòu)成系統(tǒng)及滿足實時需要,用一片IDT7025雙口RAM(8K×16)構(gòu)成一個TMS320C25與外部共享的RAM區(qū),以便實時地與外部進(jìn)行數(shù)據(jù)交換和通訊。這個雙口RAM區(qū)也以乒乓方式工作,以增強(qiáng)模塊的寬容性。
??? 電路的乒乓工作方式控制邏輯是由TMS320C25根據(jù)系統(tǒng)的節(jié)拍時序進(jìn)行控制的。控制電路確保CAA12與CAB12互斥,CAL12與CAR12互斥。整個電路簡單、緊湊、協(xié)調(diào)有序。由于采用了VLSI器件設(shè)計,電路設(shè)計大大簡化,調(diào)試方便、功能強(qiáng)大、性能可靠、吞吐量大(完成1024點FFT的數(shù)據(jù)通過率為2.343M字/秒)。
電路的乒乓工作方式控制邏輯是由TMS320C25根據(jù)系統(tǒng)的節(jié)拍時序進(jìn)行控制的。控制電路確保CAA12與CAB12互斥,CAL12與CAR12互斥。整個電路簡單、緊湊、協(xié)調(diào)有序。由于采用了VLSI器件設(shè)計,電路設(shè)計大大簡化,調(diào)試方便、功能強(qiáng)大、性能可靠、吞吐量大(完成1024點FFT的數(shù)據(jù)通過率為2.343M字/秒)。
??? 3 軟件設(shè)計
??? TMS320C25的主要任務(wù)有:(1)根據(jù)功能需要對TMC2310進(jìn)行編程設(shè)置及控制管理;(2)與TMC2310進(jìn)行數(shù)據(jù)交換;(3)完成部分處理運(yùn)算(如:抽樣、積分、數(shù)值及參量計算等);(4)與系統(tǒng)進(jìn)行通訊(如數(shù)據(jù)輸入輸出及功能、方式的設(shè)立等)。我們將這些內(nèi)容分成不同的子程序按模塊進(jìn)行設(shè)計,既便于調(diào)試又易于功能擴(kuò)展。
??? 軟件主要由一個主程序與若干個子程序模塊組成。主要的模塊有:TMC2310的設(shè)置與控制;與外部的通訊;數(shù)據(jù)的輸出、數(shù)據(jù)加載、系數(shù)加載及十幾個運(yùn)算子模塊。由于篇幅有限,以下僅給出主程序流程框圖(見圖3)。
??? 將TMC2310應(yīng)用于水下目標(biāo)的檢測與估計,具有速度快、功能強(qiáng)、可編程、易操作等特點。我們用其開發(fā)研制的信號處理模塊,體積小、易擴(kuò)展。組成的系統(tǒng)能在飛機(jī)、艦船等環(huán)境下可靠工作。幾年來,經(jīng)水池、湖及海上的多次試驗和試用,證明其設(shè)計合理、應(yīng)用成功,已投入小批量生產(chǎn)。此外還可用于雷達(dá)、通訊及虛擬儀器等許多領(lǐng)域,具有很好的應(yīng)用前景。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論