本文探討的問題是“為什么可以通過感應(yīng)電壓知道轉(zhuǎn)子的位置?”具體而言,就是為什么通過觀察無刷電機繞組中產(chǎn)生的感應(yīng)電壓,可以估測出轉(zhuǎn)子的位置?感應(yīng)電壓和轉(zhuǎn)子位置之間的關(guān)系是驅(qū)動無刷電機時涉及到的重要知識,下面將就此進行說明。
2025-07-14 10:13:42 1641
1641 
無位置傳感器的無刷直流電機的位置估計方法可以從5個方面來論述:反電動勢法、電流法、狀態(tài)觀測器法、人工智能法和磁鏈法。這幾種方法的研究相對比較成熟,且都已得到一定程度的應(yīng)用。CW32生態(tài)社區(qū)在方波控制的相關(guān)應(yīng)用和Demo中多使用反電動勢法,因此,重點講述反電動勢轉(zhuǎn)子位置檢測技術(shù)。
2025-10-09 17:06:123354 
為獲得轉(zhuǎn)子當(dāng)前位置,需要采用某種轉(zhuǎn)子位置檢測環(huán)節(jié)。在有位置傳感器的系統(tǒng)中,轉(zhuǎn)子位置的檢測是通過一系列霍爾效應(yīng)傳感器來實現(xiàn)的,霍爾效應(yīng)傳感器能夠感知轉(zhuǎn)子永磁磁極的位置。
2025-10-09 17:32:273362 
上一篇文章我們講了一些無刷電機的基礎(chǔ)知識,包括無刷電機的內(nèi)部結(jié)構(gòu),驅(qū)動原理等,我們知道了只需要按照轉(zhuǎn)子的當(dāng)前位置,來按順序給定子線圈通電,就能讓電機轉(zhuǎn)動起來。
2022-10-19 15:45:0214283 
刷直流電機較內(nèi)轉(zhuǎn)子來說,轉(zhuǎn)子的轉(zhuǎn)動慣量要大很多,同系列同外形尺寸的無刷電機,根據(jù)繞線匝數(shù)的多少,會表現(xiàn)出不同的KV特性。
2023-07-12 10:19:044564 
28335直流無刷電機用定時器檢測霍爾位置信號啟動程序求幫助!!!
2018-12-07 11:36:34
逆變器換相與轉(zhuǎn)子同步來驅(qū)動電機持續(xù)運轉(zhuǎn)。盡管直流無刷電機也可以通過定子繞組產(chǎn)生的反感生電動勢來檢測轉(zhuǎn)子的位置,而省去位置傳感器,但是電機啟動時,轉(zhuǎn)速太小,反感生電動勢信號太小而無法檢測。位置傳感器可以用
2019-06-28 04:20:10
可以通過定子繞組產(chǎn)生的反感生電動勢來檢測轉(zhuǎn)子的位置,而省去位置傳感器,但是電機啟動時,轉(zhuǎn)速太小,反感生電動勢信號太小而無法檢測。可以用作直流無刷電機位置傳感器的霍爾傳感器芯片分為開關(guān)型和鎖定型兩種
2016-10-09 15:13:14
MATLAB/SIMULINK工具對該方法進行驗證,實驗結(jié)果表明該方法在全程速度下效果良好。
純分享帖,點擊下方附件免費獲取完整資料~~~
*附件:無刷電機小波神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)子位置檢測方法的研究.pdf
2025-06-25 13:06:40
無刷電機的轉(zhuǎn)子結(jié)構(gòu)是怎樣組成的?無刷電機的定子結(jié)構(gòu)是怎樣組成的?如何才能讓這個電機轉(zhuǎn)起來呢?
2021-07-23 14:15:49
做直流無刷電機控制時,必須要知道轉(zhuǎn)子的位置才能驅(qū)動電機運轉(zhuǎn),而獲取轉(zhuǎn)子位置的方法分為:傳感器計算法跟無傳感器估算法兩種。轉(zhuǎn)子位置傳感器,根據(jù)成本及應(yīng)用場景來分有:旋轉(zhuǎn)變壓器、磁編碼器、光電編碼器
2025-02-12 17:35:53
直流無刷電機的定子和轉(zhuǎn)子有什么區(qū)別?直流無刷電機有哪幾種工作方式?
2021-07-21 06:23:15
直流無刷電機是同步電機的一種,也就是說電機轉(zhuǎn)子的轉(zhuǎn)速受電機定子旋轉(zhuǎn)磁場的速度及轉(zhuǎn)子極數(shù)(p)影響:n=60.f / p。在轉(zhuǎn)子極數(shù)固定情況下,改變定子旋轉(zhuǎn)磁場的頻率就可以改變轉(zhuǎn)子的轉(zhuǎn)速。直流
2016-11-01 14:35:27
我們在電動車,家用電器,印刷機械等很多行業(yè)都可以看到直流無刷電機的應(yīng)用。直流無刷電機的運行時靠確定霍爾記錄轉(zhuǎn)子的位置,傳送信號到控制芯片來控制直流無刷電機的工作狀態(tài)。 這里的霍爾的作用就用來記錄直流
2019-10-31 08:00:00
直流無刷電機驅(qū)動原理是什么?直流無刷電機驅(qū)動模塊有什么功能?
2021-07-23 10:21:35
芯片,為直流無刷電機、永磁同步電機、2相步進電機、直流有刷電機和音圈電機提供磁場定向控制。所有的控制功能都被集成在硬件上。集成了ADCs、位置傳感器接口、位置差值器,該款功能齊全的伺服控制器,適用于
2022-09-23 18:10:13
直流無刷電機有什么優(yōu)越性?直流電機具有響應(yīng)快速、較大的起動轉(zhuǎn)矩、從零轉(zhuǎn)速至額定轉(zhuǎn)速具備可提供額定轉(zhuǎn)矩的性能,但直流電機的優(yōu)點也正是它的缺點,因為直流電機要產(chǎn)生額定負載下恒定轉(zhuǎn)矩的性能,則電樞磁場與轉(zhuǎn)子磁場須恒維持90°,這就要藉由碳刷及整流子。
2019-09-12 09:05:02
本文提出了一種采用脈沖注入來檢測無刷直流電機在靜止?fàn)顟B(tài)時轉(zhuǎn)子位置的方法。基
于方法依次向定子繞組注入一系列的脈沖,通過脈沖電流的變化對轉(zhuǎn)子位置進行估算。實驗
結(jié)果表明:該方法不但具有較高的位置檢測準(zhǔn)確性,同時對電機的參數(shù)依賴性低,可以省去
電機內(nèi)部的檢測元件,又可以應(yīng)用到其它電機。
2025-03-14 16:24:10
位置檢查的演示中,可看到在使用此解決方案的手動低速旋轉(zhuǎn)來進行實際轉(zhuǎn)子位置檢測。請觀看視頻, 看看如何利用RL78/G1F的內(nèi)置功能實現(xiàn)無傳感器BLDC電機的初始轉(zhuǎn)子位置檢測。來體驗一下吧!注) 演示
2019-05-21 16:28:43
大家好,一般驅(qū)動無感無刷電機,都是靠BEMF反電勢來檢測轉(zhuǎn)子的位置的,典型電路就是幾個電阻分壓加幾個電容濾波。
但我在stm32的電機驅(qū)動開發(fā)板上,沒有發(fā)現(xiàn)這個電路。
請教,stm32的foc
2024-04-28 06:03:43
無刷電機轉(zhuǎn)子的初始位置信息,形成所謂的檢測“盲區(qū)”。目前,基于反電動勢法的無位置傳感器無刷電機比較多地采用“三段式”起動方法。所謂“三段式”,是指電機起動過程經(jīng)過轉(zhuǎn)子定位、外同步加速和切換三個階段
2021-05-06 12:04:41
摘 要:論文研究了一種直流無刷電機的無位置傳感器的轉(zhuǎn)子位置的硬件電路檢測方法。結(jié)合傳統(tǒng)“反電動勢\"方法,分析并設(shè)計了一種新的帶通濾波器延時檢測電路。該電路不僅可以抑制高頻分量和消除直流
2025-08-04 14:56:17
上,它能保證當(dāng)電樞導(dǎo)體從一個定子磁極下轉(zhuǎn)到另一個極下時其中的電流同步改變方向,直流無刷電機電樞繞組中電流方向的改變由功率管的開關(guān)來控制,為保證開關(guān)信號與轉(zhuǎn)子磁極轉(zhuǎn)過的位置同步,需要有檢測轉(zhuǎn)子位置角
2019-10-30 16:52:19
對電機逆變側(cè)所通 PVM 脈沖進行計數(shù),并采用校正算法來確定電機轉(zhuǎn)子的精確位置。在 Malsb/Sim-ilink 下對該轉(zhuǎn)子位置檢測方法進行建模,設(shè)計了基于 DSP F28I2的 BLDCM 控制
2025-07-29 16:14:54
本帖最后由 abc1900aa 于 2017-12-21 10:56 編輯
一、什么是直流無刷電機? 直流無刷電機是由定子、轉(zhuǎn)子、位置傳感器及換相電路組成的。電子采用疊片結(jié)構(gòu)并在槽內(nèi)鋪設(shè)繞組
2017-12-20 16:21:38
如何測量電機轉(zhuǎn)子的位置?
2021-09-24 07:03:45
關(guān)于電機轉(zhuǎn)子初始位置檢測的方法電機轉(zhuǎn)子檢測的目的對位置的幾種方法使用d軸電流吸合時的電角度解算使用q軸電流吸合時的電角度解算總結(jié)電機轉(zhuǎn)子檢測的目的電機實現(xiàn)閉環(huán)需要電機的轉(zhuǎn)速和轉(zhuǎn)子實際位置的反饋量
2021-09-16 06:48:03
本文闡述了無位置傳感器直流無刷電機控制中退磁與轉(zhuǎn)子位置檢測的關(guān)系,通過對退磁過程的分析,提出了通過 PWM 配置使斷電繞組具有最大反向電壓的加速退方法。
純分享帖,點擊下方附件免費獲取完整資料
2025-08-04 14:45:50
為了解決無位置傳感器直流無刷電機在起動時基于反電動勢的位置檢測方法無法提取出位置信息的問題,分析了無位置傳感器直流無刷電機的起動方法,針對電動車這一特殊的應(yīng)用場合進行了相應(yīng)的改進,電動車在起動時有
2025-08-04 14:49:53
)配置到數(shù)據(jù)空間,也用來存放臨時變量。 圖3是根據(jù)前述控制原理設(shè)計的基于DSP的直流無刷電機控制系統(tǒng)。該系統(tǒng)主要由直流無刷電機、功率變換器電路、電機轉(zhuǎn)子位置檢測電路、各種保護電路以及以
2018-11-07 10:41:54
主要有以下幾個方面的優(yōu)點: 一、省去了電機內(nèi)部容易損壞的霍爾傳感器 目前的電動自行車直流無刷電機內(nèi)部安裝有霍爾位置傳感器,用來檢測電機的轉(zhuǎn)子位置,控制系統(tǒng)根據(jù)傳感器提供的轉(zhuǎn)子位置信號來控制電機的運轉(zhuǎn)
2018-10-30 16:00:02
轉(zhuǎn)子位置檢測是影響無刷直流電機可靠性的關(guān)鍵因素之一。根據(jù)無刷電機轉(zhuǎn)子位置傳感器的冗余配置準(zhǔn)則,提出一種基于霍爾元件和旋轉(zhuǎn)變壓器的非相似余度檢測方案。詳細分析了這兩類傳感器的輸出與無刷電機的最佳換相
2025-07-09 14:15:50
無感BLDC的轉(zhuǎn)子位置檢測是什么?三相無刷直流電機反電勢和傳感器輸出信號間相位有何關(guān)系?數(shù)字反電勢法根據(jù)A/D采樣時刻的不同可分為哪幾種?
2021-09-17 06:59:17
1、電子換相無刷電機要對轉(zhuǎn)子永磁體位置進行精確檢測,并用電子開關(guān)切換不同繞組通電以獲得持續(xù)向前的動力,在目前的絕大多數(shù)電動車三相無刷電機中均使用三個開關(guān)式的霍爾傳感器檢測永磁體相對于定子線圈的位置
2021-09-07 09:19:34
摘 要:針對應(yīng)用在不能反轉(zhuǎn)場合采用無位置控制技術(shù)的無刷直流電機,分析了其繞組等效電感和轉(zhuǎn)子初始位置的關(guān)系。設(shè)計了一套通過注入檢測電壓矢量,比較對應(yīng)母線電流大小關(guān)系來確定轉(zhuǎn)子初始位置的方法,并分析了
2025-07-24 11:53:09
電機轉(zhuǎn)子的轉(zhuǎn)速回授至控制中心反復(fù)校正,n=120.f/p轉(zhuǎn)子極數(shù)固定情況下。以期達到接近直流無刷電機特性的方式。也就是說直流無刷電機能夠在額定負載范圍內(nèi)當(dāng)負載變化時仍可以控制電機轉(zhuǎn)子維持一定的轉(zhuǎn)速
2016-01-18 15:30:16
霍爾IC在無刷電機中的應(yīng)用與原理可分為以下兩部分闡述:
一、核心應(yīng)用
?轉(zhuǎn)子位置檢測?
無刷電機通過霍爾IC實時監(jiān)測轉(zhuǎn)子永磁體的磁場位置,生成與磁極位置相對應(yīng)的數(shù)字或模擬信號。例如,三相無刷電機通常
2025-07-29 14:55:45
基于人們對于生活品質(zhì)的高要求,家用電器的節(jié)能,環(huán)保,噪音等也逐漸成為人們采購電器時候的重要影響因素,新型直流無刷電機便應(yīng)運而生,低噪聲環(huán)保,低能耗的特征使他成為了家電產(chǎn)品使用電機的首選。直流無刷電機
2016-07-05 14:59:40
C8051F120/C8051F121/C8051F123/C8051F124/C8051F125/C8051F126/C8051F127和C8051F13x 系列器件是完全集成的混合信號片上系統(tǒng)型MCU 芯片,具有64 個數(shù)字I/O 引腳(100 腳TQFP 封裝)或32 個數(shù)字I/O 引腳(64
2008-07-20 21:15:03 426
426 介紹了無刷直流電機無位置傳感器轉(zhuǎn)子位置檢測的一種新方法。該方法利用非導(dǎo)通相反電勢邏輯電平經(jīng)邏輯處理后得到一脈沖列, 采用PLL 鎖相技術(shù)將脈沖列倍頻, 通過倍頻電路計數(shù)器
2009-07-09 12:56:2058 表1.1.1. 產(chǎn)品選擇指南 7圖1.1. C8051F206 C8051F220和C8051F226框圖48TQFP 8圖1.2. C8051F221框圖32LQFP 9圖1.3.
2009-08-01 19:39:50262 基于C8051F005 的無刷直流電機控制系統(tǒng):介紹了永磁無刷直流電動機的工作原理,設(shè)計了基于C8051F 的電機控制系統(tǒng)。它與傳統(tǒng)的控制方式相比具有更快的運算速度和易于實現(xiàn)實時控
2009-09-29 09:51:10127 描述:STM32F103C8_Dome.rar基于STM32的雙閉控制直流無刷電機BLDC源代碼。
2015-12-31 09:19:08848 此程序芯片為C8051F020通過DAC的輸出來驅(qū)動直流電機
2017-08-31 17:14:3345 直流無刷電機因為具有直流有刷電機的特性,同時驅(qū)動器也是頻率變化的裝置,所以又名直流變頻,直流無刷電機的運轉(zhuǎn)效率,低速轉(zhuǎn)矩,轉(zhuǎn)速精度等都比任何控制技術(shù)的變頻器還要好,由于無刷直流電動機是以自控式運行的,所以不會象變頻調(diào)速下重載啟動的同步電機那樣在轉(zhuǎn)子上另加啟動繞組,也不會在負載突變時產(chǎn)生振蕩和失步。
2018-12-18 15:59:5315300 ,會造成電機的運行性能問題。? ? ? 而無霍爾直流無刷電機運行平穩(wěn)、起動可靠,采用的是不直接使用轉(zhuǎn)子霍爾傳感器,但在電機的運行中需要轉(zhuǎn)子位置信號來控制電機換相,轉(zhuǎn)子的位置信號檢測大多數(shù)采用的是檢測
2019-04-28 20:19:0313416 ? ? ? 上篇我們說到的是無霍爾直流無刷電機換相原理,根據(jù)電機的反電動勢來獲取轉(zhuǎn)子的位置信號,那么如何能使無霍爾直流無刷電機運行起來?下面我們給大家介紹無霍爾直流無刷電機起動方法:1、外同步三段式
2019-04-28 20:19:0321659 本篇應(yīng)用說明介紹了 R7F0C807 單片機在直流無刷電機控制中的應(yīng)用。
本篇應(yīng)用說明介紹了使用 R7F0C807 單片機的 RTO 功能模塊,輸出 6 路 PWM 控制信號控制直流無刷電機的應(yīng)用。
2019-05-20 08:00:0017 我們在電動車,家 用電器 ,印刷機械等很多行業(yè)都可以看到直流無刷電機的應(yīng)用。直流無刷電機的運行時靠確定 霍爾 記錄轉(zhuǎn)子的位置,傳送信號到控制 芯片 來控制直流無刷電機的工作狀態(tài)。 這里的霍爾的作用
2019-07-17 10:02:1611485 
很多特定的條件下,無位置傳感器的無刷電機就成為了很多用戶的理想選擇。風(fēng)機驅(qū)動用無位置傳感器BLDC無刷電機采用有位置傳感器驅(qū)動零碎,是一種正在發(fā)展的新型直流無刷電機。因為在通常的的直流無刷電機及中擱置
2019-07-30 18:46:457010 無位置控制技術(shù)的關(guān)鍵在于轉(zhuǎn)子位置準(zhǔn)確測試,無位置傳感器控制技術(shù)發(fā)展至今,已經(jīng)出現(xiàn)很多控制策略,直流無刷電機驅(qū)動推薦其中應(yīng)用比較的廣泛的有:反電動勢過零測試法、線反電動勢過零法、滑模觀測器法等。而直流
2019-08-14 22:46:567681 什么是直流無刷電機的機械制動?那么,如何去實現(xiàn)機械制動?直流無刷電機機械制動:把主電斷開,接入一個反向電壓,轉(zhuǎn)子快停轉(zhuǎn)了,如果在轉(zhuǎn)子一端有剎車裝置,可實現(xiàn)機械制動。直流無刷電機不加驅(qū)動電壓自由滑行
2019-09-17 20:12:278922 有感霍爾無刷電機轉(zhuǎn)子的位置檢測主要通過霍爾傳感器來實現(xiàn),通過處理器的異或功能可以講霍爾傳感器發(fā)出的三路180°的信號處理為一路60°的信號
2019-11-14 13:51:436612 直流無刷電機 ZW系列無刷電機 1. 概述 ZW系列無刷電機采用4/8極轉(zhuǎn)子設(shè)計,機型號有57、60、7086、110等。0.1牛米到6牛米的連續(xù)轉(zhuǎn)矩,高性能貼硼磁鋼提供2倍以上的峰值扭矩。 2.
2020-03-15 16:28:006131 直流無刷電機控制系統(tǒng)中,電機的換相是由轉(zhuǎn)子的位置決定的,因此必須有轉(zhuǎn)子位置傳感器對轉(zhuǎn)子位置進行實時檢測。
2020-04-03 10:27:5513356 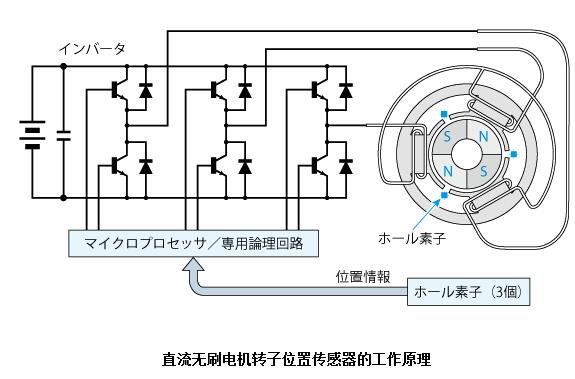
實驗室攪拌器高速無刷電機的轉(zhuǎn)速通常在20000rpm到30000rpm/min.高速電機的設(shè)計與普通低速低頻的電機有很大的不同,轉(zhuǎn)子與軸承系統(tǒng)的動力學(xué)分析對高速電機的運行可靠性有這重要的意義。 轉(zhuǎn)子
2020-04-13 10:13:204447 直流無刷電機為獲得轉(zhuǎn)子當(dāng)前位置,需要采用某種轉(zhuǎn)子位置檢測環(huán)節(jié)。在有位置傳感器的系統(tǒng)中,轉(zhuǎn)子位置的檢測是通過一系列霍爾效應(yīng)傳感器來實現(xiàn)的。霍爾效應(yīng)傳感器能夠感知轉(zhuǎn)子永磁磁極的位置。但位置傳感器的存在
2020-04-22 11:39:058249 
如前所述,直流無刷電機的工作原理必須有轉(zhuǎn)子磁場位置的信息,以控制逆變器功率器件的開/關(guān)實現(xiàn)繞組的換相。例如,三相六狀態(tài)運行的無刷電機在內(nèi)部安放三個轉(zhuǎn)子位置傳感器確定六個換相點時刻。傳統(tǒng)的直流無刷電機
2020-05-09 15:01:111834 方波直流無刷電機轉(zhuǎn)子位置傳感器和控制器比較簡單、體積小、控制成本低,在直流無刷電機中占有很高的比例。控制器的產(chǎn)量很大,特別是電動自行車的控制器,全國的產(chǎn)量非常大,每年要生產(chǎn)數(shù)千萬只,其中
2020-05-11 09:46:363911 開路現(xiàn)象,電機應(yīng)接好,然后用絕緣材料包裹,套上絕緣管,包扎好,烘干; 2、對直流無刷電機籠轉(zhuǎn)子斷籠現(xiàn)象,可采用焊接法、冷焊法或帶更換法進行修復(fù); 3、直流無刷電機槽中的斷點,可用組消除法找出斷點,并在繞組中將斷點連
2020-06-11 09:35:465607 無刷電機磁極對數(shù)是檢測轉(zhuǎn)子磁極磁場的變化來辨別的,轉(zhuǎn)子磁鋼是按照N極、S極交替排列的,當(dāng)無刷電機霍爾檢測到磁鋼從N極躍變到S極,或者S極躍變到N極時,霍爾的輸出就會有相應(yīng)的高低電平變化,也就說明轉(zhuǎn)子
2020-06-28 17:17:478505 檢測永磁轉(zhuǎn)動、轉(zhuǎn)子轉(zhuǎn)動引起的磁場變化。 直流無刷電機采用光電式位置傳感器,在定子組件上按一定位置配置光電感測裝置,轉(zhuǎn)子上配有遮光板,光源為LED或小燈泡。當(dāng)轉(zhuǎn)子轉(zhuǎn)動時,由于遮光板的作用,定子上的感光元件會產(chǎn)生以
2020-12-31 10:35:276716 為準(zhǔn)確獲取永磁同步電機(PMSM)轉(zhuǎn)子初始位置信息,實現(xiàn)電機的平穩(wěn)起動,提出一種 PMSM 轉(zhuǎn)子初始位置檢測方法和基于增量式編碼器的 PMSM 起動策略。 從定子電流矢量的角度預(yù)定位 PMSM 轉(zhuǎn)子
2021-04-08 09:39:4329 。為了實現(xiàn)無刷換向,無刷電機的電樞繞組首先放置在其定子位置,但這還不夠,因為使用直流電源為給定的定子繞組供電,只能產(chǎn)生不能彼此垂直,所以它不能驅(qū)動轉(zhuǎn)子旋轉(zhuǎn)。所以,除了電機轉(zhuǎn)子和定子之外,單相無刷電機系統(tǒng)還需
2021-08-10 10:51:076228 。為了實現(xiàn)無刷換向,無刷電機的電樞繞組首先放置在其定子位置,但這還不夠,因為使用直流電源為給定的定子繞組供電,只能產(chǎn)生不能彼此垂直,所以它不能驅(qū)動轉(zhuǎn)子旋轉(zhuǎn)。所以,除了電機轉(zhuǎn)子和定子之外,單相無刷電機系統(tǒng)還需
2021-07-16 09:30:427144 一種新型的永磁同步電機轉(zhuǎn)子初始位置檢測
2021-08-02 10:54:189 永磁同步電機轉(zhuǎn)子初始位置檢測及啟動策略
2021-08-02 10:50:1730 無刷電機位置傳感器有:磁敏式、光電式和電磁式三種類型 使用磁敏式位置傳感器的直流無刷電機,其磁敏器件(如霍爾元件、磁敏二極管、磁敏導(dǎo)電管、磁敏電阻或?qū)S眉呻娐返?被安裝在一個定子組件上,用于檢測
2021-09-17 11:05:415012 基于C8051F的模數(shù)轉(zhuǎn)換及其在直流電機驅(qū)動系統(tǒng)中的應(yīng)用(電源技術(shù)雜志社)-基于C8051F的模數(shù)轉(zhuǎn)換及其在直流電機驅(qū)動系統(tǒng)中的應(yīng)用
2021-09-16 15:25:106 基于C8051F005的無刷直流電機控制系統(tǒng)(深圳核達中遠通電源技術(shù)開發(fā)有限公司招聘)-基于C8051F005的無刷直流電機控制系統(tǒng)
2021-09-17 14:51:5717 BLDC直流無刷電機驅(qū)動(村田電源技術(shù)(上海)有限公司 (研發(fā)中心))-BLDC直流無刷電機驅(qū)動? ? ? ? ? ? ? ? ? ? ? ?
2021-09-18 17:29:55416 直流無刷電機的工作原理(核達中遠通電源技術(shù)工資)-直流無刷電機的工作原理? ? ? ? ? ? ? ? ? ? ? ? ? ??
2021-09-18 17:59:02123 直流無刷電機控制原理(通信電源技術(shù)規(guī)范書)-? 直流無刷電機控制原理,一本很經(jīng)典的書籍,希望對設(shè)計直流電機控制的又幫助。
2021-09-23 13:28:33191 PIC16F877實現(xiàn)直流無刷電機的控制(深圳市核達中遠通電源技術(shù)有限公司電話)-PIC16F877實現(xiàn)直流無刷電機的控制。PDF中有詳盡的直流無刷電機介紹。
2021-09-28 12:11:1599 三相無刷電機的線圈被固定在電路板上,并纏繞在鐵芯上。三相無刷電機的線圈是固定的,永磁體(轉(zhuǎn)子)在外側(cè)旋轉(zhuǎn)。三相無刷電機通常使用霍爾元件來檢測轉(zhuǎn)子(磁體)的位置。
2023-02-23 17:52:121969 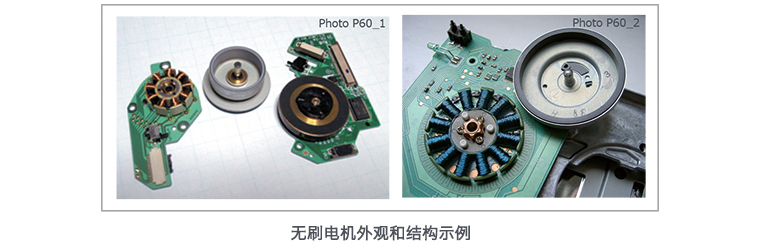
在上一篇“三相全波無刷電機的旋轉(zhuǎn)原理”中,介紹了三相全波無刷電機通過三個線圈中的驅(qū)動電流切換實現(xiàn)旋轉(zhuǎn)的原理。接下來將介紹三相全波無刷電機的驅(qū)動方法,但在此之前會先介紹三相全波無刷電機的位置檢測方法,因為在實際的三相全波無刷電機驅(qū)動中,需要檢測旋轉(zhuǎn)的永磁體的位置。
2023-02-24 09:51:092878 
在三相全波無刷電機的旋轉(zhuǎn)原理中,介紹了三相全波無刷電機通過三個線圈中的驅(qū)動電流切換實現(xiàn)旋轉(zhuǎn)的原理。接下來將介紹三相全波無刷電機的驅(qū)動方法,但在此之前會先介紹三相全波無刷電機的位置檢測方法,因為在實際的三相全波無刷電機驅(qū)動中,需要檢測旋轉(zhuǎn)的永磁體的位置。
2023-03-07 11:36:461925 
目前直流無刷電機的控制主要分兩大類:方波控制(梯形波控制)與正弦波控制,本文PEKEW派酷就具體解說一下這兩種控制方式: 1)方波控制 通過霍爾傳感器獲得電機轉(zhuǎn)子的位置,然后根據(jù)轉(zhuǎn)子的位置在360
2023-03-08 14:51:524 直流無刷電機(Brushless Direct Current Motor,BLDC)沒有了直流有刷電機的電刷及換向器等結(jié)構(gòu),線圈繞組不參與旋轉(zhuǎn)而是作為定子,永磁體作為轉(zhuǎn)子,通過控制線圈電流方向
2023-03-08 15:16:574 一直是通過 石墨電刷 與安裝在轉(zhuǎn)子上的 環(huán)形換向器 相接觸來實現(xiàn)的。 而無刷電機則通過 霍爾傳感器 把轉(zhuǎn)子位置反饋回控制電路,使其能夠獲知電機相位 換向的準(zhǔn)確時間 。大多數(shù)無刷電機生產(chǎn)商生產(chǎn)的電機都具有
2023-03-08 14:58:260 直流無刷電機(Brushless DC motor,BLDC motor)是一種相對于傳統(tǒng)直流電機而言的新型電機,它以無刷方式取代了傳統(tǒng)換向器。它是一種直接將電能轉(zhuǎn)化為機械能的電動機,通常由定子、轉(zhuǎn)子、減速機和編碼器等幾個部分組成。
2023-03-27 15:59:4011156 我們知道,獲取磁鐵的位置可以用霍爾傳感器,無刷電機的轉(zhuǎn)子就是永磁體,因此只要在合適的位置安裝霍爾傳感器,就能知道轉(zhuǎn)子的旋轉(zhuǎn)位置。
在無刷電機中,一般用3個開關(guān)型霍爾器件就能檢測轉(zhuǎn)子的位置。霍爾的安裝位置可以相隔120°,也可以相隔60°,我們以下
2023-04-21 11:29:437011 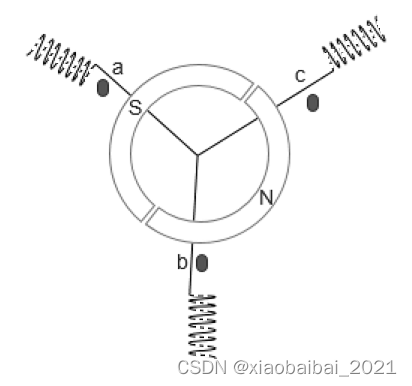
直流無刷電機直流無刷電機(BLDC)是一種用電子換向的直流電機,直流無刷電機由電機主體和驅(qū)動器組成。電機的定子繞組一般為三相對稱星形接法,電機的轉(zhuǎn)子為永磁體。為了檢測電機轉(zhuǎn)子的極性,在電機內(nèi)裝有位置
2022-04-18 17:06:231850 
無刷電機:由定子、轉(zhuǎn)子、控制器等幾個主要部分組成。無刷電機的轉(zhuǎn)子上沒有碳刷和集電環(huán),取而代之的是一組控制器,它可以通過檢測到轉(zhuǎn)子位置來觸發(fā)發(fā)送正確的交換推力電位。
2023-08-26 10:29:088031 與傳統(tǒng)的電機不同的是,無刷電機的轉(zhuǎn)子上沒有刷子和集電環(huán),這使得它不僅減少了機械磨損,而且減小了整個系統(tǒng)的體積和重量。無刷電機的轉(zhuǎn)子上安裝了一個電子設(shè)備,稱為轉(zhuǎn)子傳感器。轉(zhuǎn)子傳感器可以測量轉(zhuǎn)子的位置,并將這個信息傳遞給控制器
2023-08-26 10:38:227110 不管是直流有刷電機還是無刷電機,電機都有兩個主要結(jié)構(gòu)——定子和轉(zhuǎn)子。定子固定、轉(zhuǎn)子旋轉(zhuǎn),其中一方為磁體、一方為線圈,也是線圈與磁體的相對運動使得電動轉(zhuǎn)化成了機械能,這也是電機轉(zhuǎn)動的原因。
2023-09-07 10:29:323039 無刷電機和傳統(tǒng)的有刷電機的構(gòu)造差異非常大。無刷電機的轉(zhuǎn)子上沒有傳統(tǒng)的碳刷子,在轉(zhuǎn)子上有固定的電子元件,比如霍爾元件、傳感器等,這些元件可以感受電極磁極位置,并調(diào)整電機的電流和電壓,從而實現(xiàn)電機的控制。伺服電機中,也有類似的元件用于調(diào)整電機的轉(zhuǎn)速和轉(zhuǎn)矩。
2023-10-15 09:16:386249 無刷電機在某些領(lǐng)域也稱直流變頻電機(BLDC),它采用電子換向(霍爾傳感器),線圈不動磁極動,此時永磁鐵可以在線圈外部也可以在線圈內(nèi)部,于是有了外轉(zhuǎn)子無刷電機和內(nèi)轉(zhuǎn)子無刷電機之分。
2023-12-05 14:52:112008 
定子上的磁場來實現(xiàn)電機轉(zhuǎn)速的調(diào)節(jié)。調(diào)速時,無刷電調(diào)器會控制電機內(nèi)部的三相母線電流大小和相序,以改變轉(zhuǎn)子磁場,從而控制電機的轉(zhuǎn)速。 調(diào)速的原理是基于電機內(nèi)部的傳感器對轉(zhuǎn)子的位置進行監(jiān)測,然后通過電調(diào)器中的控制算法
2023-12-20 16:00:293089 無刷電機(Brushless Motor)是一種將電能轉(zhuǎn)換為機械能的驅(qū)動裝置,也被稱為無刷直流電機(BLDC Motor)。與傳統(tǒng)的有刷電機相比,無刷電機的構(gòu)造更加簡單、耐用,效率更高,噪音更低
2024-02-01 13:57:4119309 三相全波無刷電機(BLDC)的位置檢測是其運行控制中至關(guān)重要的環(huán)節(jié)。位置檢測確保電機的電子換向系統(tǒng)能夠準(zhǔn)確地控制定子繞組的通電順序,從而產(chǎn)生正確的旋轉(zhuǎn)磁場以驅(qū)動轉(zhuǎn)子旋轉(zhuǎn)。在無刷電機中,這一功能通常由
2024-02-05 17:58:343778 
直流無刷電機(BLDC,Brushless Direct Current Motor)是一種無刷直流電動機,它具有高效率、高可靠性、低噪音和長壽命等優(yōu)點,廣泛應(yīng)用于各種工業(yè)和民用領(lǐng)域。本文將詳細介紹
2024-06-04 17:04:126102 直流無刷電機的工作原理及特點。 一、直流無刷電機的工作原理 結(jié)構(gòu)組成 直流無刷電機主要由定子、轉(zhuǎn)子、位置傳感器和電子換向器組成。 (1)定子:定子是電機的固定部分,通常由多個線圈組成,用于產(chǎn)生磁場。 (2)轉(zhuǎn)子:轉(zhuǎn)子是電機的旋轉(zhuǎn)部分,通常由永
2024-06-04 17:10:084932 無刷電機是一種常見的電機類型,廣泛應(yīng)用于各種領(lǐng)域,如工業(yè)自動化、機器人、無人機等。無刷電機主要由定子、轉(zhuǎn)子、控制器等部分組成。在無刷電機中,轉(zhuǎn)子分為內(nèi)轉(zhuǎn)子和外轉(zhuǎn)子兩種類型。下面我們將詳細介紹無刷電機內(nèi)轉(zhuǎn)子
2024-06-12 15:58:428965 直流無刷電機是一種采用電子換向器代替?zhèn)鹘y(tǒng)機械換向器的電動機。與傳統(tǒng)的有刷直流電機相比,直流無刷電機具有更高的效率、更低的噪音、更長的壽命以及更寬廣的調(diào)速范圍等優(yōu)點。直流無刷電機通常由永磁體轉(zhuǎn)子、霍爾元件和電子開關(guān)電路組成,其工作原理基于霍爾效應(yīng)和電子換向技術(shù)。
2024-06-12 17:09:512661 自動化、電動汽車和航空航天等,直流無刷電機都得到了廣泛的應(yīng)用。 一、直流無刷電機的應(yīng)用原理 直流無刷電機主要由定子、轉(zhuǎn)子和控制器三部分組成。定子由繞組和磁鐵組成,轉(zhuǎn)子由永磁體和導(dǎo)體組成。控制器負責(zé)驅(qū)動電機的運行。 定子:定子是電機的固定部
2024-10-21 14:15:421932 一、概述轉(zhuǎn)子初始位置對電機的起動性能至關(guān)重要,不準(zhǔn)確的轉(zhuǎn)子位置輕則導(dǎo)致起動電流增大,重則導(dǎo)致轉(zhuǎn) 子出現(xiàn)反轉(zhuǎn)甚至起動失敗,因此對于無機械式位置傳感器的永磁同步電機控制系統(tǒng),準(zhǔn)確的轉(zhuǎn)子初始位 置檢測
2025-04-09 13:25:360
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論