 CW32電機控制基礎--無刷電機無位置傳感器的轉子位置檢測技術
CW32電機控制基礎--無刷電機無位置傳感器的轉子位置檢測技術

無位置傳感器的無刷直流電機的位置估計方法可以從5個方面來論述:反電動勢法、電流法、狀態觀測器法、人工智能法和磁鏈法。這幾種方法的研究相對比較成熟,且都已得到一定程度的應用。CW32生態社區在方波控制的相關應用和Demo中多使用反電動勢法,因此,重點講述反電動勢轉子位置檢測技術。
一、反電動勢法
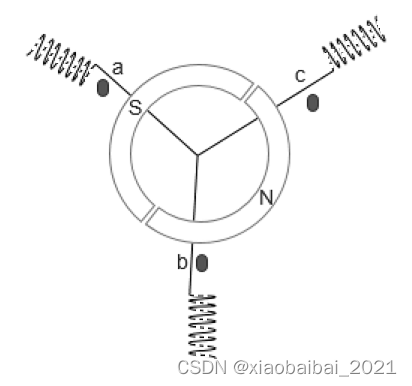
無刷直流電機中,受定子繞組產生的合成磁場的作用,轉子沿著一定的方向連續轉動。電機定子上放有電樞繞組,因此,轉子一旦旋轉,就會在空間形成導體切割磁力線的情況,根據電磁感應定律可知,導體切割磁力線會在導體中產生感應電勢。所以,在轉子旋轉的時候就會在定子繞組中產生感應電勢,即運動電勢,一般稱為反電動勢或反電勢。
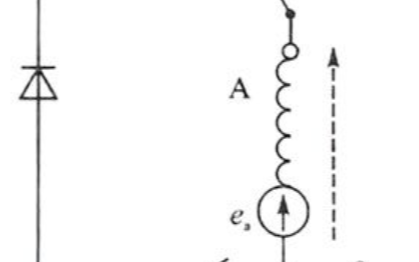
對于稀土永磁無刷直流電機,其氣隙磁場波形可以為方波,也可以是梯形波或正弦波,與永磁體形狀、電機磁路結構和磁鋼充磁等有關,由此把無刷直流電機分為方波電機和正弦波電機。對于徑向充磁結構,稀土永磁體直接面對均勻氣隙,由于稀土永磁體的取向性好,所以可以方便地獲得具有較好方波形狀的氣隙磁場,對于方波氣隙磁場的電機,當定子繞組采用集中整距繞組,即每極每相槽數q=1 時,方波磁場在定子繞組中感應的電勢為梯形波,如圖1 所示。
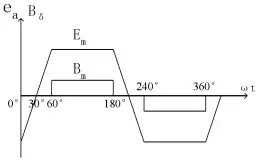
圖1方波氣隙磁場與梯形波反電勢
對于兩相導通星形連接、三相六狀態控制的無刷直流電機,方波氣隙磁密在空間的寬度應大于120°電角度,在定子繞組中感應的梯形波反電勢的平頂寬也應大于 120°電角度。方波無刷直流電機一般采用方波電流驅動,即與 120°導通型逆變器相匹配,由逆變器向方波電機提供三相對稱的、寬度為 120°電角度的方波電流。方波電流應與反電勢相位一致或位于梯形波反電勢的平頂寬度范圍內,這樣才滿足“最佳換相邏輯”[10]。
當BLDCM 的某相繞組反電勢過零時,轉子直軸與該相繞組軸線恰好重合,因此只要檢測到各相繞組反電勢的過零點,就可獲知轉子的若干個關鍵位置,再根據這些關鍵的轉子位置信號,做相應的處理后控制 BLDCM 換相,實現 BLDCM 連續運轉,這就是“反電勢法”BLDCM 控制。
從圖1中可以看出wt=30°電角度為A相反電勢過零點時刻,控制電路檢測到這一時刻,延時30°電角度,到60°電角度時切換到A相導通,A相導通120°電角度后,到 180°電角度時關斷A相,切換到B相導通。依此類推,就可以實現電機的連續運轉,并且滿足“最佳換相邏輯”。
無刷直流電機繞組反電勢的過零點嚴格的反映轉子磁極位置,因此,只要能夠準確的檢測到繞組反電勢的過零點信號,就可以判斷出轉子的關鍵位置,經過30電角度延時處理后,就可以作為繞組的換相時刻,再根據功率管的導通順序觸發相應的功率管,就能夠實現無刷直流電機的換相操作,保證電機按固定的方向連續旋轉。這樣可以保證電機換相滿足“最佳換相邏輯”,減小轉矩脈動。無感反電勢電機運行的具體實現方法詳見社區開源案例。
為了確定電機轉速和反電勢大小的關系,同時為無位置傳感器電機的“三段式”起動技術提供理論依據,這里來推導 BLDCM 反電勢的計算公式,分析無刷直流電機的反電勢特性。
為了便于分析,公式推導過程中忽略開關管動作的過渡過程和電樞繞組的電感。單根導體在氣隙磁場中感應的電勢為:
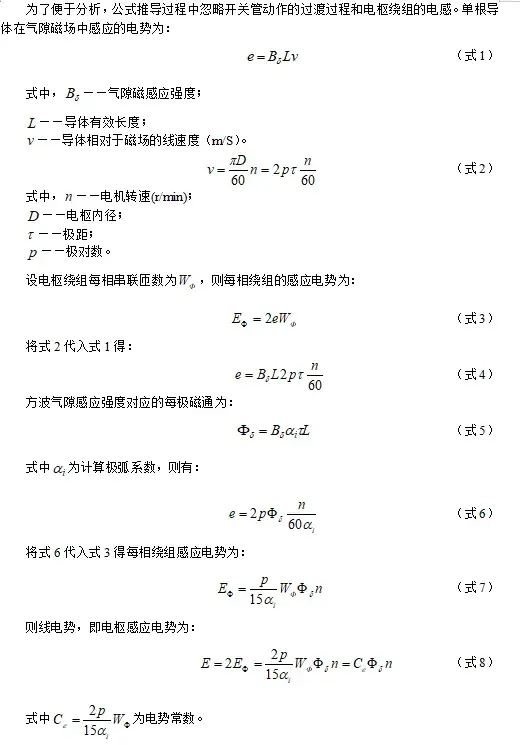
無刷直流電機的反電勢計算公式和一般直流電機相同,反電勢大小與每極磁通量及轉速有關。如保持每極磁通量不變,無刷直流電機的反電勢便和轉速成正比;反之,如保持轉速不變,無刷直流電機的反電勢將和每極磁通量成正比。從公式(8)中也可以看出,當電機靜止或轉速很低時,反電勢為零或很小,無法利用繞組反電勢獲得轉子位置信號,電機無法自起動。因此“反電勢法”無刷直流電機控制必須采用其他方法來使電機起動,這將在后面章節中作詳細介紹。
二、其它檢測方法
電流法
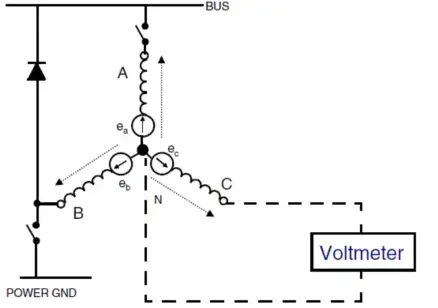
直接反電動勢法是通過測量三相繞組的端點電位及與中性點間的電壓來實現的,當某端點電位與中性點電位相等時,則認為此刻該相反電動勢過零,再延時30個電角度去觸發功率開關管進行換向。
由于端電壓檢測受速度變化、電機換向、低通濾波以及定子電阻電感存在的干擾,使得依賴端電壓的測量來估算轉子位置信號的準確性和精確性都受到不同程度的影響。而這些因素對電流的影響相對較小。與之對應出現了根據電機相電流信號來估計轉子位置信息,進而控制無刷直流電機的換向方法,如直接電流檢測法、電流變化率檢測法和續流二級管法等。這種控制方法的精確性受處理器速度和功率管開關頻率的限制,容易造成電流和反電動勢不同相位運行,導致電機故障。
狀態觀測器法
用卡爾曼濾波器估計轉子位置和轉子速度的方法最早是由M.Schroedl于1988年提出的。根據卡爾曼狀態方程,應用電機測量電壓和測量電流就可得到轉子位置的初步估測。根據這種方法來預測轉子位置和轉子速度時,其運行范圍主要受電壓、電流傳感器的測量精度來確定。
人工智能方法
人工智能技術具備一定的智能行為,能夠產生合適的求解問題的響應。隨著人工智能技術的蓬勃發展和研究的深入,很多學者已經嘗試著將人工智能的方法應用于電機控制中,神經網絡是人工智能控制的一個方向,它具有很強的自適應性和自學習能力,因此將神經網絡技術引入到無刷直流電機控制中進行轉速估算和位置估算是很自然的一步。用這種方法預測轉子位置時,運行范圍主要受電壓和電流的檢測精度影響。
磁鏈法
通過建立不依賴于轉子速度但是和轉子磁鏈直接相關的磁鏈函數來獲得轉子位置的信號。該函數在每個周期內對應6個峰值,通過檢測峰值來獲得轉子的換相信號,可保證電機在 470~35000r/min范圍內有效運行。類似的檢測轉子位置的方法,如在永磁轉子的表面粘貼一些非磁性材料,利用定子繞組高頻開關工作時非磁性材料的渦流效應,使開路相電壓的大小隨轉子位置角發生變化,從而可通過檢測開路相電壓來判斷轉子位置。這種方法完全排除了使用反電勢,因而能保證起動和低速運行時可靠地工作。
-
傳感器
+關注
關注
2577文章
55234瀏覽量
792608 -
電機控制
+關注
關注
3601文章
2144瀏覽量
278270 -
無刷電機
+關注
關注
60文章
972瀏覽量
49532
發布評論請先 登錄



 工商網監
工商網監
評論