步進(jìn)電機(jī)控制器電路
2010-02-05 15:32:40 3342
3342 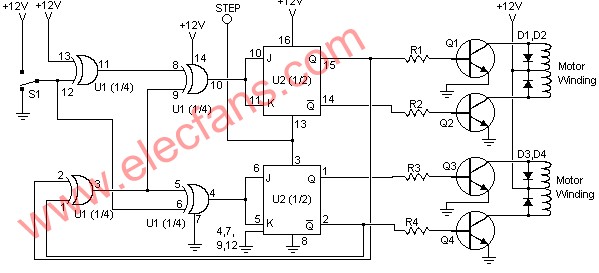
現(xiàn)代步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)通常使用集成電路功率芯片驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn),有時(shí)可能還會(huì)集成一些簡(jiǎn)單的控制功能,像電流控制。
2010-12-31 14:11:341737 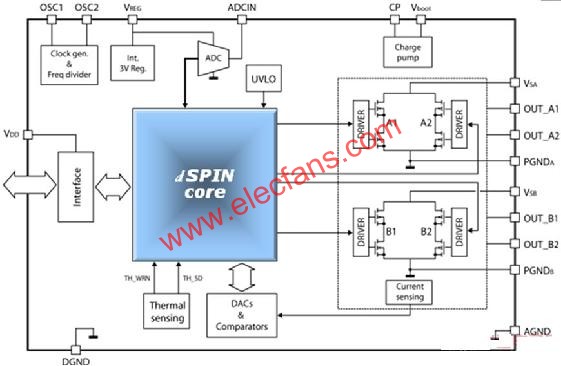
USB的眾多便利使設(shè)計(jì)師能將該總線用于許多應(yīng)用。例如,圖中顯示的是一個(gè)利用現(xiàn)成的便宜器件搭建的基于USB的4步進(jìn)電機(jī)控制器。該電路采用MCU和DSP。它利用簡(jiǎn)單邏輯電路和應(yīng)用軟件控制步進(jìn)電機(jī)的選擇
2020-11-21 10:48:063797 、PLC 和任何其他能夠發(fā)送 UDP 消息的機(jī)器來控制運(yùn)動(dòng)。您還可以控制任意數(shù)量的電機(jī),因?yàn)槊總€(gè)電機(jī)都能從網(wǎng)絡(luò)上的 DHCP 服務(wù)器獲得一個(gè) IP 地址。您還可以將末端和 E-Stops 連接到控制器。還可以通過網(wǎng)絡(luò)請(qǐng)求獲取編碼器反饋、電壓、運(yùn)行和按鈕狀態(tài)等傳感器數(shù)據(jù)。
2023-12-03 09:23:151878 
用單片機(jī)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)控制器。要求能對(duì)步進(jìn)電機(jī)實(shí)現(xiàn)正、反轉(zhuǎn)及速度控制,同時(shí)能對(duì)步進(jìn)電機(jī)進(jìn)行位置控制,即能控制步進(jìn)電機(jī)從一個(gè)位置精確地運(yùn)行到另一個(gè)位置。步進(jìn)電機(jī)為四相反應(yīng)式,軟件生成脈沖序列,可設(shè)
2013-03-20 16:48:37
步進(jìn)電機(jī)控制器總結(jié)一、整體框架:系統(tǒng)在通信方式時(shí)支持主從控制二、系統(tǒng)原理1、 控制信號(hào)模塊電機(jī)控制信號(hào):EN——>電機(jī)使能信號(hào),只有當(dāng)該信號(hào)有效的時(shí)候,步進(jìn)電機(jī)才會(huì)工作DIR/CP+——>
2021-09-07 07:46:23
步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)一個(gè)開環(huán)步進(jìn)電機(jī)控制系統(tǒng)。使得步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)。并能實(shí)現(xiàn)啟停、正反轉(zhuǎn)、調(diào)速控制。以及顯示速度。2.設(shè)計(jì)要求如下:①硬件測(cè)試通過。接線完成。三個(gè)芯片分別測(cè)試通過。步進(jìn)電機(jī)
2021-06-29 06:48:40
,電機(jī)體積越小,則共振區(qū)向上偏移,反之亦然。為使電機(jī)輸出力矩大,不失步和整個(gè)系統(tǒng)的噪音降低,一般工作點(diǎn)均應(yīng)偏移共振區(qū)較多。丟步(失步): 控制器給電機(jī)發(fā)了n個(gè)脈沖,步進(jìn)電機(jī)并沒有轉(zhuǎn)動(dòng)n個(gè)步距角。一般當(dāng)
2023-03-01 10:29:10
步進(jìn)電機(jī)與步進(jìn)電機(jī)控制器連接:A+:黑A-:綠B+:紅B-:藍(lán)電機(jī)控制器與arduino板連接:PUL-,DIR-,EN-連arduino的地EN+:脫機(jī)信號(hào),接地或者不接DIR+:控制轉(zhuǎn)動(dòng)方向,高電平正轉(zhuǎn)PUL+:控制脈沖...
2021-07-08 07:21:38
01步進(jìn)電機(jī)驅(qū)動(dòng)控制器步進(jìn)電機(jī)驅(qū)動(dòng)器作為實(shí)驗(yàn)裝置可控的部分,能夠提供自動(dòng)測(cè)量的方法。前面已經(jīng)有兩款步進(jìn)電機(jī)驅(qū)動(dòng)器:SH-20403AXIS12雙軸藍(lán)牙移動(dòng)框架基于ESP8266WiFi步進(jìn)電機(jī)控制
2021-08-31 08:32:52
SM1P步進(jìn)電機(jī)控制器怎么接線?
2021-10-09 07:33:24
STK682-010GEVB,STK682-010-E評(píng)估板是一款步進(jìn)電機(jī)驅(qū)動(dòng)器混合IC,內(nèi)置超微步進(jìn)控制器,步長(zhǎng)為1/128,基于雙極性恒流PWM系統(tǒng)。它們通過提供內(nèi)置的4相分配步進(jìn)電機(jī)控制器來支持應(yīng)用簡(jiǎn)化和標(biāo)準(zhǔn)化
2019-06-28 11:24:43
引出MCU是 stm32F407ZGT6 最小系統(tǒng)板根據(jù)步進(jìn)電機(jī)控制器的資料可以知道 步進(jìn)電機(jī)的速度和轉(zhuǎn)過的角度都是通過 PUL + 和PUL- 來控制的(這里...
2021-07-08 07:46:57
伺服電機(jī)控制器與步進(jìn)電機(jī)控制器有啥不一樣?
2021-02-25 07:42:10
想利用ni的一塊板卡上的計(jì)數(shù)器口來輸出脈沖來控制步進(jìn)電機(jī),但是想不到怎么輸出一段頻率成線性變化的脈沖來實(shí)現(xiàn)步進(jìn)電機(jī)的啟動(dòng)?不知可否幫個(gè)忙。一下面為例。謝謝!!
2015-06-12 16:29:30
步進(jìn)電機(jī)是一種完全數(shù)字化的電動(dòng)執(zhí)行機(jī)構(gòu),從原理上說,其角位移與驅(qū)動(dòng)脈沖的個(gè)數(shù)成正比,在正常情況下,步進(jìn)電機(jī)具有使用簡(jiǎn)單、運(yùn)動(dòng)精確、連續(xù)運(yùn)行無累積誤差等特點(diǎn),因而被廣泛應(yīng)用于各種位置控制系統(tǒng)中。當(dāng)前
2019-09-19 06:55:10
新人一枚,希望大家能發(fā)個(gè)關(guān)于 基于LabVIEW的步進(jìn)電機(jī)PID速度控制器 的文章,謝謝了!!!!
2015-04-20 20:34:47
如何利用HMI USART串口屏做一個(gè)步進(jìn)電機(jī)控制器呢?其代碼該怎樣去實(shí)現(xiàn)呢?
2021-12-23 06:55:13
28BYJ步進(jìn)電機(jī)的配置流程是怎樣的?STM32的PWM控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn)的實(shí)質(zhì)是什么?如何利用PWM模塊來調(diào)節(jié)步進(jìn)電機(jī)不同的轉(zhuǎn)速?
2021-10-15 08:48:20
如何利用集成收發(fā)器簡(jiǎn)化AISG控制系統(tǒng)設(shè)計(jì)?
2021-05-25 06:12:43
如何使用主從定時(shí)器方式控制PWM波輸出給步進(jìn)電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)?
2021-11-18 07:59:44
如何設(shè)計(jì)一個(gè)開環(huán)步進(jìn)電機(jī)控制系統(tǒng)?
2021-10-15 06:43:25
本文介紹通過FPGA實(shí)現(xiàn)的步進(jìn)電機(jī)控制器。該控制器可以作為單片機(jī)或DSP的一個(gè)直接數(shù)字控制的外設(shè),只需向控制器的控制寄存器和分頻寄存器寫入數(shù)據(jù),即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2021-04-29 06:05:44
怎樣利用esp8266通過驅(qū)動(dòng)器來控制步進(jìn)電機(jī)呢?有誰有這方面的資料嗎
2021-06-29 08:36:42
由于項(xiàng)目需要樓主需要利用步進(jìn)電機(jī)來實(shí)現(xiàn)一個(gè)開關(guān)拉門的動(dòng)作。由于,控制精度要求不高,所以只需要樹莓派做控制器即可。網(wǎng)上樹莓派控制步進(jìn)電機(jī)的教程大多局限于如圖所示的小功率步進(jìn)電機(jī),不符合項(xiàng)目需求。所以
2021-07-08 07:39:40
Controller/Driver),來自于大恒新紀(jì)元科技股份有限公司。現(xiàn)在拆解它,利用其中的部件組成其他的實(shí)驗(yàn)系統(tǒng)。▲ 待拆解的步進(jìn)電機(jī)控制器的外觀 01拆解過程1.內(nèi)部的組成打開機(jī)殼后,可以看到內(nèi)部的組成包括:三個(gè)步進(jìn)電機(jī)控制器,型號(hào):HS-20403電源變壓器:...
2021-07-08 06:35:29
請(qǐng)問各位,片上系統(tǒng)如何簡(jiǎn)化風(fēng)扇控制器設(shè)計(jì)?
2021-05-13 07:00:06
步進(jìn)電機(jī)控制_液晶顯示一、實(shí)驗(yàn)?zāi)康亩?shí)驗(yàn)內(nèi)容三、實(shí)驗(yàn)步驟四、C代碼如下五、實(shí)驗(yàn)結(jié)果六、實(shí)驗(yàn)體會(huì)一、實(shí)驗(yàn)?zāi)康挠?0C51單片機(jī)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)控制器二、實(shí)驗(yàn)內(nèi)容1.用8015設(shè)計(jì)一個(gè)四相步進(jìn)電機(jī)
2021-12-06 07:31:54
在本篇文章中,我們將學(xué)習(xí)如何使用A4988步進(jìn)驅(qū)動(dòng)器和Arduino開發(fā)板控制步進(jìn)電機(jī)。概述A4988是一款用于控制雙極步進(jìn)電機(jī)的微步進(jìn)驅(qū)動(dòng)器,內(nèi)置轉(zhuǎn)換器,易于操作。這意味著我們可以用控制器的2個(gè)
2021-08-31 08:59:34
Arduino 2560控制兩個(gè)步進(jìn)電機(jī)用arduino和步進(jìn)電機(jī)控制器驅(qū)動(dòng)兩個(gè)步進(jìn)電機(jī),具體的接線過程和怎樣連接都在圖片上。準(zhǔn)備工具:兩個(gè)步進(jìn)電機(jī)(我用的是J42):Arduino板(我用
2021-08-31 06:13:29
描述硬盤步進(jìn)電機(jī)速度控制器這個(gè)想法來自控制步進(jìn)電機(jī)的需要,而不需要復(fù)雜的編程或微控制器和其他復(fù)雜的 IC,我想找到最便宜的解決方案。PCB
2022-08-05 06:29:44
跪求!!求基于LabVIEW步進(jìn)電機(jī)PID速度控制器的設(shè)計(jì)
2015-04-21 15:52:00
一用通過運(yùn)動(dòng)采集卡來控制步進(jìn)電機(jī)相比, 本文采用的計(jì)算機(jī)并口作為連接機(jī)和步進(jìn)電機(jī)驅(qū)動(dòng)器的通訊媒介來傳輸脈沖信號(hào)的方式, 不僅價(jià)格低廉, 而且更加容易推廣。 2.系統(tǒng)控制的研究方案 2.1系統(tǒng)總體
2019-05-08 06:15:33
基于GAL器件的步進(jìn)電機(jī)控制器的研究與設(shè)計(jì)
采用GAL控制脈沖分配的邏輯設(shè)計(jì)若采用集成電路芯片來實(shí)現(xiàn)三相六拍步進(jìn)電機(jī)的控制,所用器件較多! 電路一般比較復(fù)雜# 為
2008-10-21 01:53:23 42
42 本文闡述了基于CPLD的毛皮機(jī)梳理頭步進(jìn)電機(jī)控制器的設(shè)計(jì)原理與結(jié)構(gòu)。
2009-04-02 17:00:3718 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD 和鍵盤陣列, 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在X/
2009-04-06 17:12:3142 介紹了用一個(gè)開關(guān)代替單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行手動(dòng)控制的原理電路,給出了步進(jìn)電機(jī)的開關(guān)控制電路,以及用一個(gè)開關(guān)控制數(shù)字電位器和加減計(jì)數(shù)器設(shè)置計(jì)數(shù)器輸出的兩種擴(kuò)展電路
2009-04-29 13:52:4323 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):步進(jìn)電機(jī)控制器.vhd,直流電機(jī)控制器.vhd
2009-05-27 08:51:5463 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):
2009-05-27 10:23:0547 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng):通過ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開環(huán)控制。在步進(jìn)電機(jī)
2009-08-25 18:27:01102 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD和鍵盤陣列,構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿
2009-09-10 09:19:3033 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL 為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA 內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速
2010-01-18 14:52:31314 本文介紹了一種的新型的步進(jìn)電機(jī)控制系統(tǒng),采用DSP作為控制器,構(gòu)建步進(jìn)電機(jī)的驅(qū)動(dòng)系統(tǒng),并在此基礎(chǔ)上實(shí)現(xiàn)細(xì)分角度和電流的實(shí)時(shí)運(yùn)算。利用其片內(nèi)集成的事件管理模塊通過軟
2010-02-21 14:14:0035 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速、減
2010-07-13 16:14:4045 控制步進(jìn)電機(jī)的現(xiàn)場(chǎng)總線端子-集成的步進(jìn)電機(jī)控制器:用于新驅(qū)動(dòng)技術(shù)的總線端子為最高功率為200W 的小型步進(jìn)電機(jī)提供了運(yùn)動(dòng)控制解決方案。KL2531和KL2541 步進(jìn)電機(jī)端子便是用于傳
2010-10-06 09:52:5741 步進(jìn)電機(jī)的PLC直接控制
步進(jìn)電機(jī)的可編程控制器直接控制,可使組合機(jī)床自動(dòng)生產(chǎn)線控制系統(tǒng)的成本顯著下降。文章介紹了用PLC控制步
2009-06-19 14:09:033273 
基于FPGA的步進(jìn)電機(jī)控制器設(shè)計(jì)
?????? 目前大多數(shù)步進(jìn)電機(jī)控制器需要主控制器發(fā)送時(shí)鐘信號(hào),并且要至少一個(gè)I/O口來輔助控
2010-02-09 10:44:443069 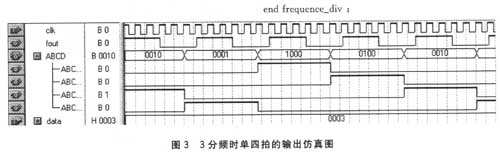
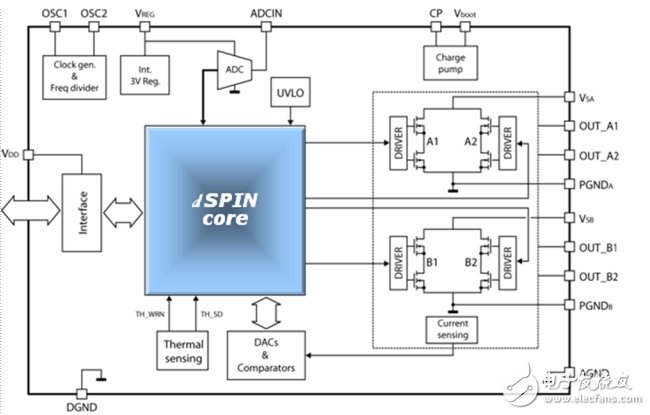
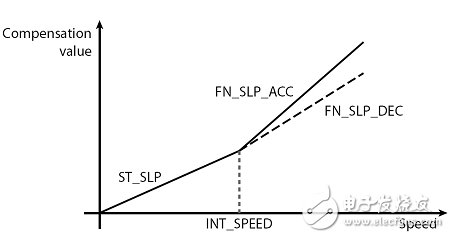
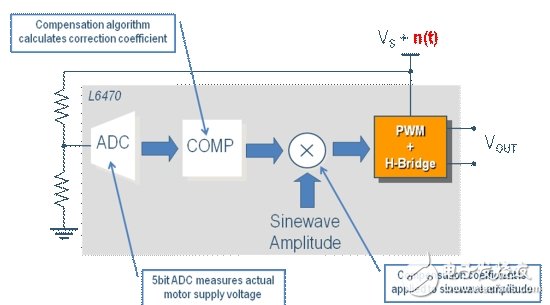
意法半導(dǎo)體新推出的步進(jìn)電機(jī)控制芯片L6470在一顆芯片上集成了功率級(jí)和一個(gè)數(shù)字控制內(nèi)核。這款步進(jìn)電機(jī)控制
2011-01-06 13:09:041257 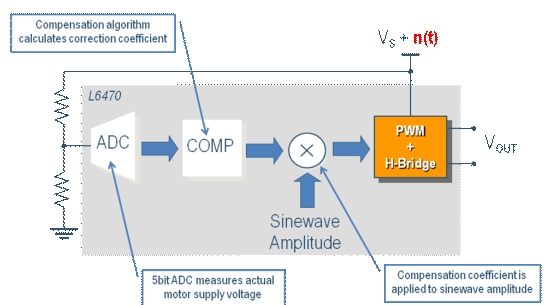
步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0158 步進(jìn)電機(jī)控制器,感興趣的小伙伴們可以看一看。
2016-08-23 16:23:3217 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-08-11 16:47:2325536 
利用恩智浦LPC1500微控制器簡(jiǎn)化BLDC和FOC電機(jī)控制
2017-09-21 08:55:0812 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-09-29 09:06:081 、反饋裝置、驅(qū)動(dòng)放大器、運(yùn)動(dòng)控制器組合成一個(gè)整體。其優(yōu)勢(shì)為:體積小、故障率低、無需匹配電機(jī)和驅(qū)動(dòng)控制器,使用簡(jiǎn)單,系統(tǒng)設(shè)計(jì)和維護(hù)方便,大大減少產(chǎn)品開發(fā)時(shí)間。 然而國(guó)外的一體化步進(jìn)系統(tǒng)售價(jià)高昂,一般在200到1000美
2017-11-01 10:16:015 步進(jìn)電機(jī)是一種完全數(shù)字化的電動(dòng)執(zhí)行機(jī)構(gòu),從原理上說,其角位移與驅(qū)動(dòng)脈沖的個(gè)數(shù)成正比,在正常情況下,步進(jìn)電機(jī)具有使用簡(jiǎn)單、運(yùn)動(dòng)精確、連續(xù)運(yùn)行無累積誤差等特點(diǎn),因而被廣泛應(yīng)用于各種位置控制系統(tǒng)中。 傳統(tǒng)
2017-11-08 14:21:4512 步進(jìn)電機(jī)的控制系統(tǒng)有了新的的研究方向與意義。本文描述了一個(gè)由STM32微處理器、步進(jìn)電機(jī)、LCD顯示器、鍵盤等模塊構(gòu)成的,提供基于STM32的PWM細(xì)分技術(shù)的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)采用STM32微處理器為核心,在MDK的環(huán)境下進(jìn)行編程,根據(jù)鍵盤的
2017-11-27 18:49:3694 ,從而可以構(gòu)建多軸步進(jìn)電機(jī)控制器的可編程片上系統(tǒng)(SOPC系統(tǒng))。利用VHDL硬件描述語言,設(shè)計(jì)了一種高性能步進(jìn)電機(jī)IP核,并進(jìn)行了仿真驗(yàn)證。為了驗(yàn)證該IP核的復(fù)用性,構(gòu)建了一個(gè)4軸步進(jìn)電機(jī)控制器的SoPC系統(tǒng)。實(shí)驗(yàn)結(jié)果表明,此系統(tǒng)可對(duì)多軸步進(jìn)電機(jī)
2017-12-06 10:41:3024 文中介紹了一種基于STM32控制器的步進(jìn)電機(jī)控制系統(tǒng),該系統(tǒng)對(duì)步進(jìn)電機(jī)的加速和減速運(yùn)動(dòng)采用了s型函數(shù)模型,有效的避免了系統(tǒng)在高速運(yùn)動(dòng)時(shí)出現(xiàn)的失步和過沖現(xiàn)象。在系統(tǒng)中通過調(diào)節(jié)分頻系數(shù)保證了系統(tǒng)在高頻
2018-01-09 14:53:5127 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2018-02-11 13:50:0015438 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4729 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2018-09-16 09:48:193411 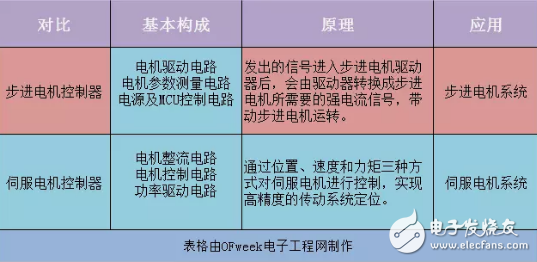
該項(xiàng)目旨在通過制造模塊化控制器來簡(jiǎn)化步進(jìn)電機(jī)的使用,該模塊化控制器可以輕松驅(qū)動(dòng)步進(jìn)電機(jī),而無需使用微控制器來完成工作。
2019-08-08 11:52:0319850 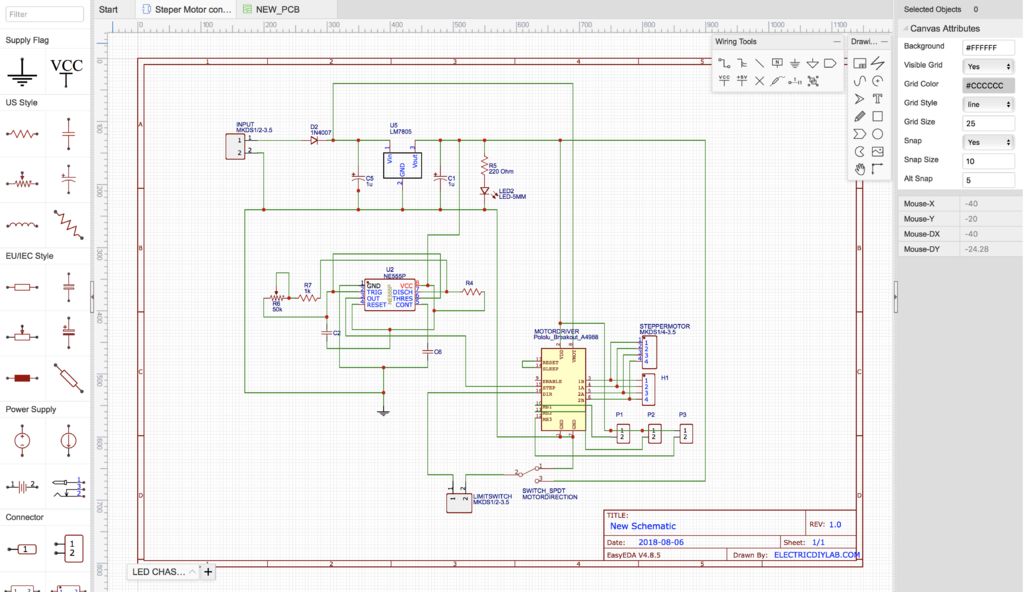
步進(jìn)電機(jī)控制器是一種能夠發(fā)出平均脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2019-10-01 15:10:008330 
步進(jìn)電機(jī)控制器接線圖如下:接線之前我們需要大概了解,控制器需要發(fā)送什么信號(hào),才能控制驅(qū)動(dòng)器,進(jìn)而操縱電機(jī)。
2019-10-01 08:51:0019286 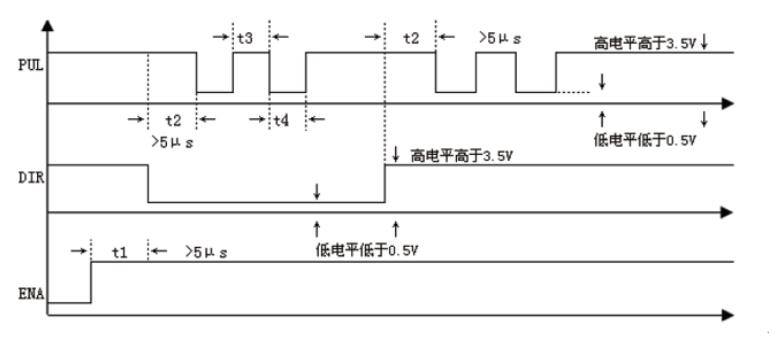
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-10-01 08:58:0017380 步進(jìn)電機(jī)控制器:它是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-12-10 08:49:069925 步進(jìn)電機(jī)已經(jīng)滲透入我們生活的方方面面,本文介紹了一些重要的步進(jìn)電機(jī)相關(guān)技術(shù),為開發(fā)人員基本了解步進(jìn)電機(jī)的工作原理提供了足夠的信息,同時(shí)也介紹了用微控制器或數(shù)字信號(hào)處理器控制步進(jìn)電機(jī)的方法。 步進(jìn)電機(jī)也叫步進(jìn)器,它利用電磁學(xué)原理,將電能轉(zhuǎn)換為機(jī)械能,人們?cè)缭?0世紀(jì)20年代就開始使用這種電機(jī)。
2020-03-14 09:09:053667 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2020-12-14 20:26:092826 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2021-01-31 06:17:2415 介紹基于FPGA 的步進(jìn)電機(jī)控制器的設(shè)計(jì), 在分析步進(jìn)電機(jī)的工作原理的基礎(chǔ)上, 給出了層次化設(shè)計(jì)方案與VHDL程序,并利用Quartus Ⅱ進(jìn)行了仿真并給出了仿真結(jié)果。它以FP GA 作為核心器件
2021-02-05 11:37:0027 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)并且運(yùn)用范圍廣泛的電機(jī)控制器,步進(jìn)電機(jī)控制器怎么使用?下面就由小編來簡(jiǎn)單介紹一下!
2021-07-19 09:52:577151 本文檔作備份用。摘 要: 設(shè)計(jì)了一種具有多模式的步進(jìn)電機(jī)控制裝置,本裝置基于STC的一款單片機(jī)STC89C52,軟件部分由C51編寫,包含啟停中斷程序、轉(zhuǎn)向中斷程序、步進(jìn)電機(jī)調(diào)速程序以及鍵盤信號(hào)
2021-11-23 16:22:5118 引出MCU是 stm32F407ZGT6 最小系統(tǒng)板根據(jù)步進(jìn)電機(jī)控制器的資料可以知道 步進(jìn)電機(jī)的速度和轉(zhuǎn)過的角度都是通過 PUL + 和PUL- 來控制的(這里...
2021-12-05 12:51:160 有多種版本的步進(jìn)電機(jī)類型,也有多種版本的步進(jìn)電機(jī)控制器設(shè)計(jì)。本電路是一款使用ICTDA2030作為驅(qū)動(dòng)器的通用步進(jìn)電機(jī)控制器。
2022-06-04 17:17:004226 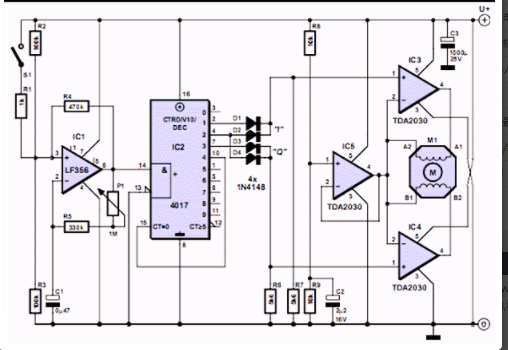
電子發(fā)燒友網(wǎng)站提供《用于Arduino UNO兼容板的3個(gè)步進(jìn)電機(jī)控制器載板.zip》資料免費(fèi)下載
2022-07-19 10:56:451 電子發(fā)燒友網(wǎng)站提供《硬盤步進(jìn)電機(jī)速度控制器.zip》資料免費(fèi)下載
2022-07-22 11:29:022 MS35711T 器件是一款步進(jìn)電機(jī)控制器, 它使用外部 N 溝道 MOSFET 來驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī)或兩個(gè)刷式直流電機(jī)。
2022-07-31 10:26:464 電子發(fā)燒友網(wǎng)站提供《PCB設(shè)備步進(jìn)電機(jī)控制器.zip》資料免費(fèi)下載
2022-08-22 16:17:532 電子發(fā)燒友網(wǎng)站提供《如何測(cè)試TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器控制器和步進(jìn)電機(jī).zip》資料免費(fèi)下載
2022-12-06 15:51:087 步進(jìn)電機(jī)是一種特殊的電動(dòng)機(jī),相較于傳統(tǒng)的直流電機(jī)或交流電機(jī),其具有以下幾個(gè)特點(diǎn):
高精度定位:步進(jìn)電機(jī)可以通過控制脈沖信號(hào)來實(shí)現(xiàn)準(zhǔn)確的位置定位,通常可達(dá)到0.9度或更小的步距角度,精度高于傳統(tǒng)電機(jī)。
2023-03-08 14:17:279088 步進(jìn)電機(jī)的驅(qū)動(dòng)方式可以描述為:
1、步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。
2、當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。
3、通過
2023-03-16 14:04:533 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所
需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-03-23 10:24:221 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,可以用來控制步進(jìn)電機(jī)的轉(zhuǎn)速和方向。步進(jìn)電機(jī)控制器通常包括一個(gè)驅(qū)動(dòng)電路板和一個(gè)控制板,驅(qū)動(dòng)電路板用于提供電源和輸出脈沖信號(hào),控制板則用于控制步進(jìn)電機(jī)的運(yùn)行。
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置一般包括以下幾個(gè)方面:
2023-03-26 22:30:202197 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:038 信號(hào)來控制電機(jī)的轉(zhuǎn)動(dòng)角度和速度。 步進(jìn)伺服是一種基于步進(jìn)電機(jī)的改進(jìn)型產(chǎn)品,其工作原理是在步進(jìn)電機(jī)上增加了閉環(huán)控制系統(tǒng),以實(shí)現(xiàn)更高的精度和穩(wěn)定性。步進(jìn)伺服可以通過反饋控制器獲取電機(jī)的實(shí)際位置和速度信息,并與設(shè)
2023-06-13 08:30:021520 那些在運(yùn)行過程中移動(dòng)距離和速度均確定的具體設(shè)備,認(rèn)為采用PLC通過步進(jìn)電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)也是一種技術(shù)方案。▲CRT-工業(yè)運(yùn)動(dòng)控制器步進(jìn)電機(jī)的特點(diǎn):(1
2023-08-07 08:09:363137 
電子發(fā)燒友網(wǎng)站提供《步進(jìn)電機(jī)控制器的FPGA的實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-07 16:29:171 電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:10:401 :本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型 LCD 和鍵盤陣列 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在 X/Y 軸方向聯(lián)動(dòng)。文中討論
2023-12-18 09:24:246 步進(jìn)電機(jī)是一種可以實(shí)現(xiàn)精確的位置控制的驅(qū)動(dòng)器。它通過交替通電和斷電的方式來控制電機(jī)的旋轉(zhuǎn)角度和速度。步進(jìn)電機(jī)通常由一個(gè)旋轉(zhuǎn)部分(轉(zhuǎn)子)和一個(gè)靜止部分(定子)組成。整個(gè)系統(tǒng)由電源、控制器和電機(jī)
2024-01-18 11:02:456490 控制,需要使用步進(jìn)電機(jī)控制器。步進(jìn)電機(jī)控制器是一種電子裝置,用于接收和處理控制信號(hào),并將其轉(zhuǎn)換為電機(jī)驅(qū)動(dòng)信號(hào)。通過調(diào)整步進(jìn)電機(jī)控制器的參數(shù)設(shè)置,可以使電機(jī)按照需求進(jìn)行旋轉(zhuǎn),實(shí)現(xiàn)精確的運(yùn)動(dòng)控制。 在進(jìn)行步進(jìn)電
2024-01-19 10:50:225084 :全步進(jìn)控制是步進(jìn)電機(jī)最基本的控制方式。它通過控制電流的方向和大小來控制電機(jī)的轉(zhuǎn)動(dòng)。具體來說,當(dāng)電流按照順時(shí)針方向流過第一個(gè)線圈時(shí),電機(jī)會(huì)向前轉(zhuǎn)動(dòng)一個(gè)固定的角度,當(dāng)電流反向流過第一個(gè)線圈時(shí),電機(jī)會(huì)向后轉(zhuǎn)動(dòng)同
2024-01-22 17:18:182071 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,主要用于控制步進(jìn)電機(jī)的運(yùn)動(dòng)。它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2024-02-07 17:57:008569 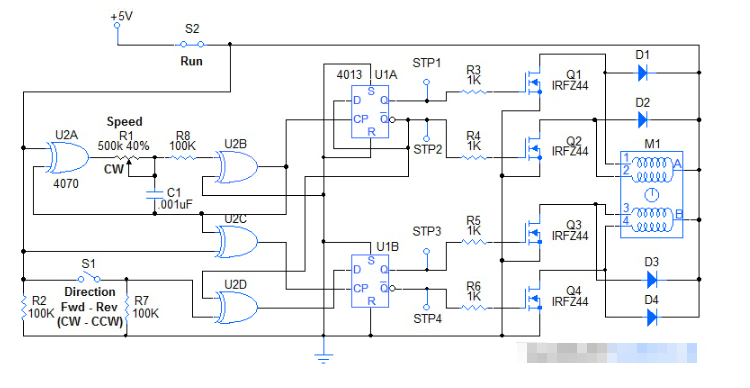
引言 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移的電機(jī),具有控制精度高、響應(yīng)速度快、結(jié)構(gòu)簡(jiǎn)單等優(yōu)點(diǎn)。在自動(dòng)化設(shè)備、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域得到了廣泛應(yīng)用。步進(jìn)電機(jī)控制器是實(shí)現(xiàn)步進(jìn)電機(jī)控制的關(guān)鍵部件,通過
2024-06-12 09:17:356005 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)運(yùn)行的裝置。步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件,其運(yùn)行需要由步進(jìn)電機(jī)控制器產(chǎn)生的脈沖信號(hào)來進(jìn)行驅(qū)動(dòng)。這些脈沖信號(hào)不僅決定了步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)方向,還決定了其轉(zhuǎn)動(dòng)的速度和位置。
2024-06-20 16:14:155083 
步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,它通過發(fā)出脈沖信號(hào)來驅(qū)動(dòng)步進(jìn)電機(jī),實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)動(dòng)角度、速度和方向的精確控制。步進(jìn)電機(jī)控制器通常包括一個(gè)脈沖信號(hào)發(fā)生器、一個(gè)驅(qū)動(dòng)器和一個(gè)控制板。脈沖
2024-06-24 17:12:236470 
步進(jìn)電機(jī)伺服控制系統(tǒng)是一種精密的電機(jī)控制系統(tǒng),它通過精確控制電機(jī)的步進(jìn)角度來實(shí)現(xiàn)對(duì)機(jī)械運(yùn)動(dòng)的精確控制。這種系統(tǒng)廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、精密儀器等領(lǐng)域。 步進(jìn)電機(jī)伺服控制系統(tǒng)的作用 步進(jìn)電機(jī)伺服
2024-09-04 09:46:121709
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論