 電子發燒友App
電子發燒友App



引言
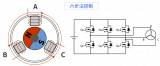
BLDC具備諸多優勢,例如外型緊湊、結構簡單、高效率、低噪音、較長使用壽命等等,這種電機越來越廣泛地應用于自動化、工業和消費類電子產品等領域。圖1所示為典型的BLDC電機框圖,該電機包括一個梯形磁通的永磁同步電機、一個轉子位置檢測器(通常為三個霍爾傳感器)和一個驅動電機的三相逆變器。另外,必須配置一個單片機(MCU),輸出特定的脈沖寬度調制(PWM)模式來驅動BLDC電機。如同一個傳統直流電機那樣,電機的換流必須與轉子位置同步,用戶可以通過改變PWM的占空比來調節電機轉速。
通常,電機中的三個霍爾傳感器相互成60度角。也就是說,每隔60度其中一個傳感器就會變換其狀態,完成一次電循環需要進行6次狀態變換。在這種情況下,定子的相電流始于霍爾傳感器信號轉換后的30度,保持120度。為了使電機正常運行,MCU的輸出模式(換流順序)應當依據輸入模式(轉子位置信號)來確定,輸入轉子位置信號模式與輸出PWM模式相結合,即構成換流表。

圖1 BLDC電機框圖

圖2 CAPCOM6E框圖
單片機C868和CAPCOM6E單元
C868是英飛凌公司8位單片機產品家族中的新成員,可為各種應用和系統提供低成本的先進控制功能。借助功能強大的片上PWM發生單元CAPCOM6E,C868滿足了對低成本、高實時性的電力電子控制的所有要求。利用靈活的CAPCOM6E,由硬件/軟件處理所有對時間要求十分苛刻的任務,而CPU則處理用戶命令,并可進行相應的控制運算。內置的5通道8位ADC所具備的同步特性有助于測量無噪音相關的系統參數。
CAPCOM6E可驅動多種類型的電機(交流異步電機IM、直流無刷電機BLDC和開關磁阻電機SRM等),它是基于此類PWM單元十多年的研發的最新成果。CAPCOM6E具備以下特性:
—T12具有三個捕捉/比較通道,每個通道有兩個輸出,可用作捕捉通道或比較通道,并且具備死區時間控制,可避免電源電路出現短路。T12有中心對齊、邊緣對齊、單脈沖觸發模式和滯環控制等控制模式。對于BLDC電機控制,通道1可用于捕捉速度,通道2可用作相位延遲,而通道3可用作超時功能。
—T13有一個獨立的比較通道和1路輸出,可生成高速PWM信號,并控制占空比。T13也支持單脈沖觸發模式,可與T12同步。PWM信號可自動迭加至T12的6路輸出中任何一路(或全部)的有效電平上。對于BLDC電機控制,通過T13 PWM的占空比調節電機速度。
如圖2所示,CC60-CC62和COUT60-COUT62是用于驅動電機的6個基本輸出信號。對于BLDC電機控制,應當通過三個輸入口CCPOS0-CCPOS2(轉子位置反饋信號)的狀態來控制輸出信號。T13生成的高頻PWM信號具有高達50ns的分辨率,加至T12的CC60-CC62和COUT60-COUT62輸出中的任何一個有效電平。CTRAP是緊急中斷輸入。如果該輸入為低,CC60-CC62和COUT60-COUT62將立即變為預定義的電平,以實現過流/過壓保護。用戶僅需設置各種寄存器的值,例如周期寄存器、比較寄存器、偏移寄存器等等,即可快捷地控制CAPCOM6E。
值得指出的是借助CAPCOM6E,用戶可通過軟件建立任何塊交換表(或狀態機),同時由硬件生成相應的PWM輸出信號。這樣可以非常靈活地實現任何控制要求。下面的例子是以定義自制的塊交換表的源代碼。數組下標HALL_PATTERNS_NUMBER 從0至5。
// Hall patterns
ubyte HallPatterns [HALL_PATTERNS_NUMBER]=
{
0x25, // Current=100 Expected=101
0x29, // Current=101 Expected=001
0x0b, // Current=001 Expected=011
0x1a, // Current=011 Expected=010
0x16, // Current=010 Expected=110
0x34, // Current=110 Expected=100
};
ubyte PWMPatterns[ HALL_PATTERNS_NUMBER]=
{
0x18, // U=0 V=- W=+ COUT62/CC62=01 COUT61/CC61=10 COUT60/CC60=00
0x12, // U=- V=0 W=+ COUT62/CC62=01 COUT61/CC61=00 COUT60/CC60=10
0x06, // U=- V=+ W=0 COUT62/CC62=00 COUT61/CC61=01 COUT60/CC60=10
0x24, // U=0 V=+ W=- COUT62/CC62=10 COUT61/CC61=01 COUT60/CC60=00
0x21, // U=+ V=0 W=- COUT62/CC62=10 COUT61/CC61=00 COUT60/CC60=01
0x09 // U=+ V=-W=0 COUT62/CC62=00 COUT61/CC61=10 COUT60/CC60=01
};

圖3 無傳感器C868 BLDC系統(a)利用外部比較器

(b)利用A/D轉換器

圖4 CAPCOM6E具備特殊功能用于BLDC電機控制
無傳感器的BLDC控制
在有些應用中,不能使用霍爾傳感器或其它直接檢測轉子位置的方法,因此需要采用間接方法來檢測轉子位置。對于如圖3中所示的電機運行,探測電機反電勢的過零點是獲得電機轉子位置最常見的方法。按照120度導電方式, 任何時間都有一相電機端子沒有外加電壓,因此可以在該相電機端子檢測電機反電勢來得知轉子位置。
在圖3(a)中,各個相位使用的霍爾傳感器用三個電阻分壓器和一個比較器替代。比較器向C868提供三個轉子位置信號。CAPCOM6E特別適用于這個解決方案,因為它的每路輸入均有一個噪聲濾波器可抑制噪音,并具備相位延遲功能,可調節相位角度,如圖4所示。
如圖4所示,通過設置T12計時器的死區時間定時器,用戶可以定義噪音抑制窗口,通過設置T12通道1的比較值,用戶可以使T12輸出發生相位延遲,通過設置T12通道2的比較值,用戶可以了解有多長時間輸入沒有變化。T12通道0為捕捉模式,以測量實際速度。
在圖3(b)中,電機端子電壓可由C868的A/D轉換器檢測,A/D轉換可由T13溢出觸發,通常,反電勢信號有很大噪音,進行測量的最佳時機是在關閉電力電子開關的器件前的瞬間。此時正是T13溢出的時間。因此,每一次T13溢出均會觸發一次ADC測量。軟件僅須讀取該值并與預定義的閾值(過零點)進行比較。如果達到了該閾值點,軟件將重設T12,以準備下一個PWM狀態。當相位延遲結束后(因為反向電動勢BEMF過零點約比換流點提前30度),T12通道1的比較事件將觸發換流至下一個狀態。實驗結果表明C868 BLDC系統的A/D方法是切實有效的。
結語
本文介紹了采用英飛凌公司最新推出的8位單片機 C868及其功能強大、靈活自如的PWM發生單元CAPCOM6E實現無傳感器BLDC電機控制系統的方法。C868的CAPCOM6E具有一個用戶自定義的塊交換表(狀態機),其卓越的靈活性為用戶提供了很大應用空間,可實現任何BLDC電機控制方案。C868所帶A/D轉換器的同步功能和CAPCOM6E的相位延遲功能可以進行精確的無噪聲的反電勢測量。實驗結果證明C868確實非常適合無傳感器BLDC電機控制。
- 電機控制(276079)
- BLDC(100019)
- 單片機C(12867)


致力低成本應用,DSC助臂無傳感器BLDC控制
 4760
4760用于驅動無傳感器 BLDC 電機的優化控制方案
5443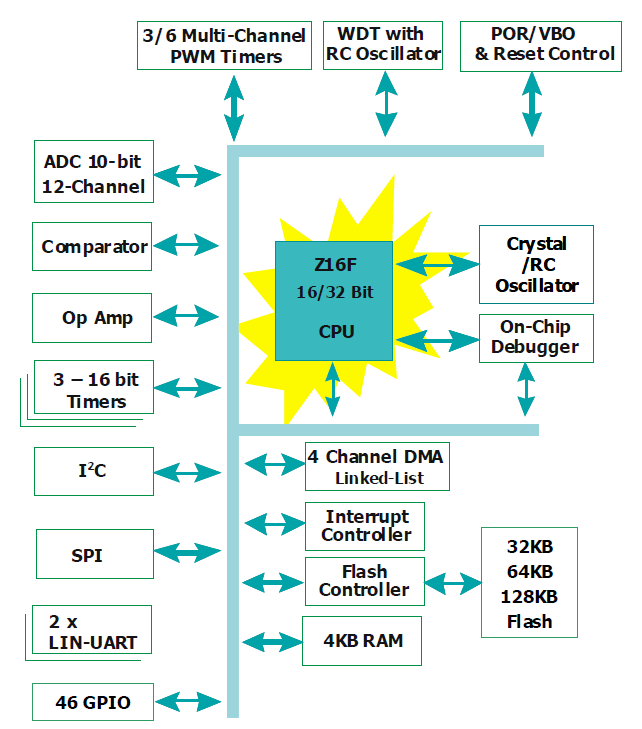
對BLDC和PMS電機使用無傳感器矢量實現精確運動控制
5113將無傳感器矢量控制與BLDC和PMS電機結合使用,提供精確運動控制
9308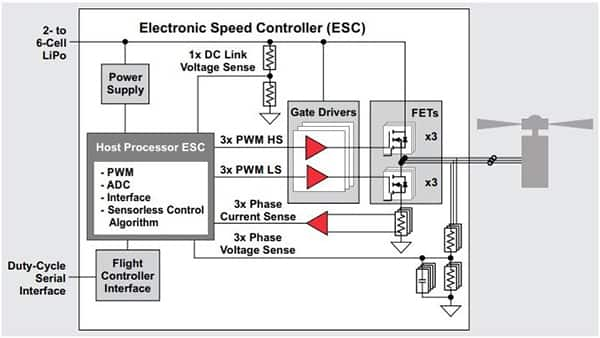
無刷直流 (BLDC) 電機和控制器的接線方式
6534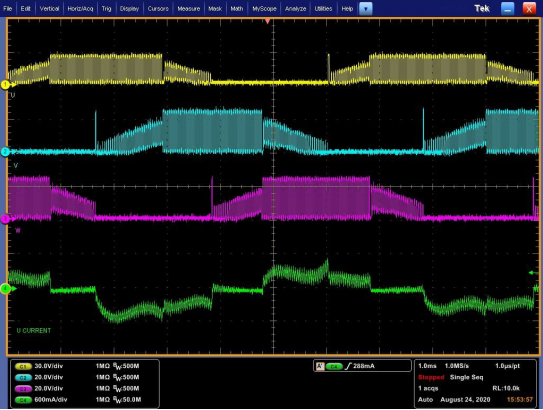
003Plus, 51單片機BLDC有感和無感控制C代碼開源資料
BLDC無傳感器控制對外部器件的依賴怎么減少?
BLDC電機控制必學知識點——角度傳感器
BLDC電機做無傳感器控制時要執行經歷的三個狀態
傳感器發展助力提高BLDC電機控制性能
無傳感器BLDC電機控制怎么引入低成本應用?
無傳感器的變速控制5V三相BLDC風扇電機
電機技術資料—BLDC 電機控制算法
F281x BLDC3_2:無傳感器、BLDC 電機梯形控制相關問題?
L78/G1F 無傳感器BLDC電機 初始轉子位置檢測
LPC 1500 系列實現 BLDC/PMSM 電機控制的技術
STC89C52單片機控制紅外傳感器
《無刷直流電機控制應用——基于STM8S系列單片機》
【案例分享】無傳感器BLDC驅動控制系統的設計
【設計技巧】想搞BLDC電機控制,就必須要懂的角度傳感器
一種大電流無傳感器BLDC電機控制器電路
什么是FOC?帶你看看無傳感器FOC的BLDC電機驅動芯片及解決方案
關于BLDC電機控制的所有信息:無傳感器無刷直流電機控制器
具有變速控制的 5V、三相無傳感器電機系統
基于無傳感器磁場定位控制的三相無刷PMSM低電流電機控制解決方案包含BOM,BOM及光繪文件
基于MC56F8006專用電機控制設備的無傳感器三相無刷直流電機驅動器的設計
基于PSoC4的無傳感器BLDC控制
多個永磁電機的無傳感器磁場定向控制
如何實現ST72141無傳感器控制的BLDC電機轉子堵轉
如何將無傳感器BLDC電機控制引入低成本應用
如何消除BLDC電機控制中的霍爾傳感器?
將無傳感器BLDC電機控制引入低成本應用
帶傳感器的無刷電機BLDC低功耗單片機芯片EN8P2712—深圳單片機開發方案公司英銳恩
案例分享:無位置傳感器的電機控制
用AT89C51單片機怎么實現通過傳感器傳遞信號給單片機,處理后驅動步進電機運停
用擇多函數實現反電動勢濾波的無傳感器BLDC
給大家推薦一款:無需軟件編程的FOC無傳感器BLDC電機控制器 AMT49406
角度傳感器在BLDC電機控制中的作用
采用56F801X DSC的霍爾傳感器參考設計的三相BLDC電機控制
采用56F801X的3相無刷直流電機無傳感器控制參考設計
采用MPC5643L MCU參考設計的3相無傳感器BLDC套件
基于MEGA8單片機的無傳感器無刷直流電機控制系統設計
 135
135單片機在冰傳感器的智能化應用
9用8位微控制器C504, C508, C868,C164CI
28基于單片機及傳感器的機器人設計與實現
49無傳感器BLDCM位置檢測的一種單片機軟件實現方法
27dsPIC30F在無傳感器BLDC 控制中的應用
42無傳感器的BLDC電機控制
69用dsPIC30F2010控制無傳感器BLDC電機,AN99
106用dsPIC30F2010控制無傳感器的BLDC電機 AN9
118無位置傳感器無刷直流電機的單片機控制實現
265dsPIC30F在無傳感器BLDC控制中的應用
78用擇多函數實現反電動勢濾波的無傳感器BLDC控制
57無傳感器BLDC應用中自主外設互操作的必要性
9將無傳感器BLDC電機控制引入低成本應用
2267
dsPIC30F在無傳感器BLDC控制中的應用
16如何使用dsPIC30F2010數字信號控制器控制無傳感器的BLDC電機
15BLDC電機控制算法的介紹和使用反電動勢濾波進行無傳感器BLDC控制概述
108如何實現無傳感器初始位置檢測
10075
基于微控制器實現無傳感器BLDC電機平順快速啟動的設計淺析
3678
如何使用雙單片機進行無刷直流電機調速系統的設計資料說明
2TMPM370無傳感器BLDC電機驅動的控制方法和電路等資料詳解
73為什么說BLDC無刷電機采用無位置傳感器更具優勢?
7009使用STM32單片機控制BLDC無刷直流電機的電路原理圖免費下載
66基于FRDM-KE02Z和Tower Board的無傳感器BLDC電機控制
2使用dsPIC30F2010控制帶傳感器的BLDC電機
27單片機C868實現無傳感器BLDC電機控制
26TI 推出無需編程無傳感器磁場定向控制和梯形控制的 70W BLDC 電機驅動器 可節省數周系統設計時間
1bldc電機什么意思 bldc電機和fpa直驅電機哪個好
11160bldc電機什么意思 bldc電機和fpa直驅電機哪個好
6222
bldc無霍爾怎么控制 BLDC電機與驅動器接線相位是任意的嗎
5245基于MSPM0 MCU實現采用無傳感器FOC算法的BLDC和PMSM控制
3基于TMS320C25 DSP的梯形無刷DC電機無傳感器控制
1基于MCT8315A的無傳感器BLDC電機驅動器技術解析
3035
- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 張迎輝:mikezhang@elecfans.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1
評論