 BLDC無位置傳感器控制方式介紹
BLDC無位置傳感器控制方式介紹

本期速覽
在第四季 第九話“常用的電機分類以及控制方法”的小課堂結尾,我們給大家留了個新的問題:
BLDC根據轉子的位置進行換向控制,而轉子位置要靠位置傳感器獲取,那么這期就為大家介紹BLDC的無位置傳感器控制方式。
01為什么需要無位置傳感器控制?
在工業生產中,我們會根據應用場景的不同,選擇合適的轉子位置傳感器。對于高精度的伺服應用,比如工業機械手臂,需要采用高分辨率的光電編碼器,或者由檢測磁場變化的磁編碼器,而對于要求較低的應用,比如工業風扇,考慮到傳感器的成本,一般采用霍爾位置傳感器就足夠了。
圖1:不同應用場景適合的位置傳感器
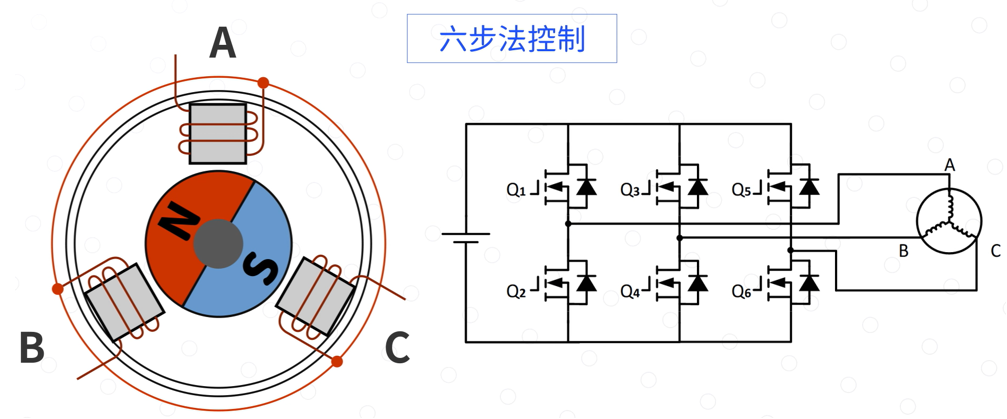
霍爾位置傳感器的尺寸小,價格廉宜,操作穩定而且安裝方便,利用霍爾傳感器在一個電氣周期內提供的六個轉子位置,作為換相信號,控制MOSFET管的通斷,就可以實現之前視頻提到的六步法轉BLDC。
但位置傳感器的存在會增加電機的體積和成本,限制系統的尺寸,在惡劣的工況下,位置傳感器有失效風險,會降低系統可靠性。
既然位置傳感器應用有限,那是不是能夠用其他位置檢測的方式代替,進一步拓展無刷直流電機的應用場合呢?
就這樣,無位置傳感器控制應運而生!!
023 大核心控制算法拆解
無位置傳感器控制的核心就是轉子位置估算策略,目前常用的BLDC無位置傳感器控制算法主要分為以下三種:
第一種常見的就是反電動勢過零檢測法,由方波驅動的BLDC在電機旋轉時,由于對轉子磁場磁感線的切割作用,定子繞組內會形成反電動勢(Back Electromotive Force,BEMF)
由相反電動勢過零點和電機換相點的位置關系可以看出,相反電勢的過零點再延遲30°電角度就是電機的換相點S,所以只要檢測到相反電動勢的過零點,便可以得到6個離散的轉子位置信號。
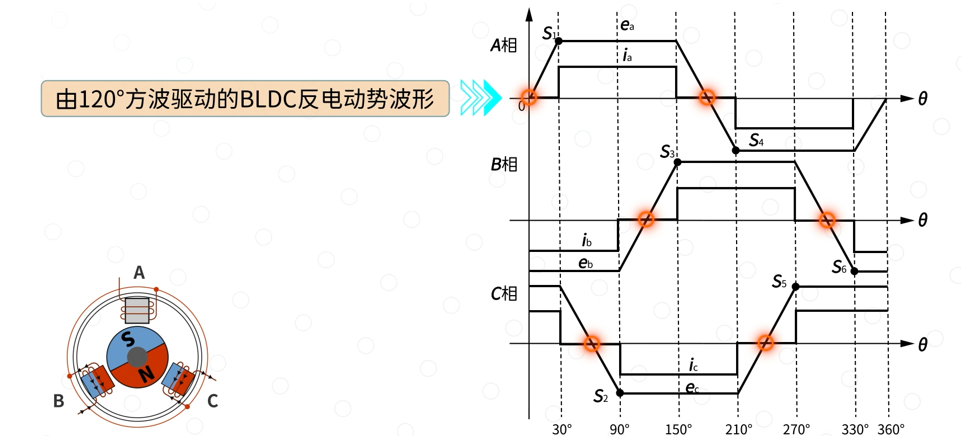
圖2:反電動勢過零檢測法方波示意圖
反電動勢法原理簡單,易于實現,但是在靜止和低速狀態下存在反電動勢難以測量、實際反電動勢波形不理想和高頻信號干擾等問題,需要設計合適的檢測電路和控制策略來獲取電機繞組的反電動勢信號。
第二種常見的無位置控制算法就是磁鏈法,它主要通過檢測BLDC定子繞組中的電流和電壓信號計算磁鏈,再根據磁鏈與轉子位置關系間接得到電機的轉子位置。
由電機學知識可以知道,這是定子相繞組的磁鏈ψ與轉子位置關系θ公式:

而電機的反電動勢與永磁磁鏈也有關系:
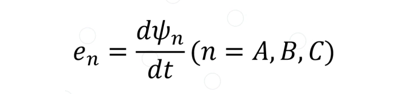
通過這些公式可以得到兩相繞組的磁鏈之差與電機換相點之間的關系,我們以A相為例,檢測到B、C兩相繞組的磁鏈之差的過零點延遲30°電角度就是電機A相的換相點。
圖3:磁鏈法方波示意圖
磁鏈法也是間接計算轉子位置,但是磁鏈幅値不受電機轉速影響,因此適用于整個速度范圍,具有更強的適應性,但還是需要靠其他方式起動電機,而且計算結果易受電機參數變化的影響,應用同樣受到限制。
第三種常見控制是采用狀態觀測器法檢測轉子位置,它的基本控制思路就是以定子電流 (iA IB IC)、母線電壓(Udc)、電機參數 (定子電阻、定子電感。。) 等為狀態變量,在電機數學模型的基礎上,建立轉子位置的觀測模型。
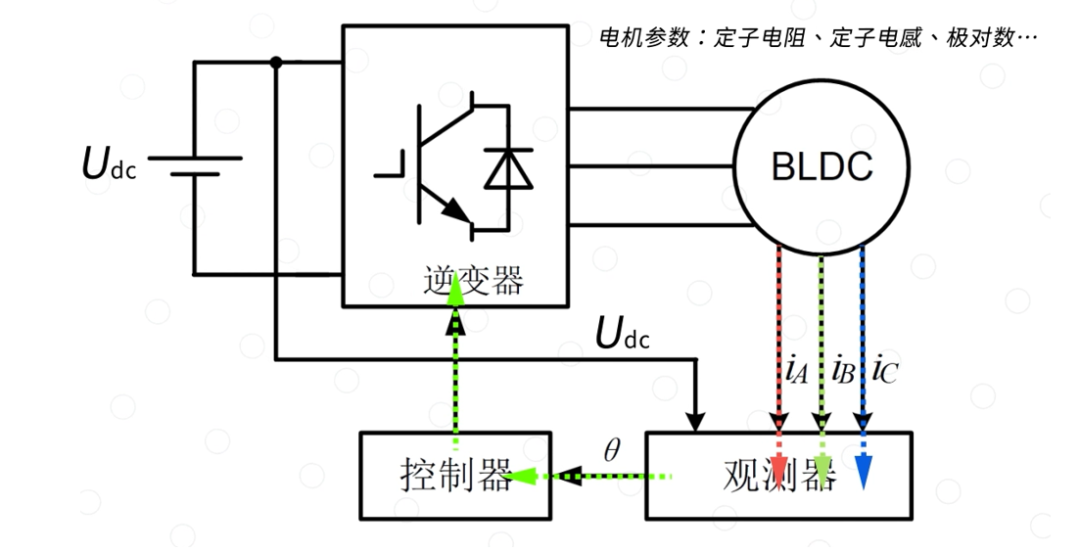
圖4:觀測模型示意圖
常見的方式是反電動勢或磁鏈觀測器,通過提取反電動勢或磁鏈中包含連續轉速或位置信息 ,實現BLDC的無位置控制,但是在零速、低速范圍內穩定性較差,還有可能完全失效。
實際應用中,可以用卡爾曼濾波器、滑模觀測器、自適應觀測器改變算法結構,實現更加有效的轉子位置檢測。
狀態觀測器法抗干擾能力強,在高速、重載等情況下控制效果也較好,并且能夠檢測到任意時刻的轉子位置信息,但是由于狀態觀測器法需要不斷地計算系統狀態變量,所以要求控制芯片有較高的運算速度。
03MPS 最新方案:MP6636 專用芯片
在BLDC無位置控制中,將無位置控制技術集成化、芯片化成為新的趨勢,MPS最新推出針對三相BLDC無位置傳感器控制的專用芯片——MP6636。
相比于反電勢過零檢測得到六個離散的轉子位置信號,MP6636能夠檢測任意時刻的轉子位置信號,采用FOC控制,保證電機在轉動過程中力矩始終恒定,相比于6步換向控制,電機運轉更平穩。
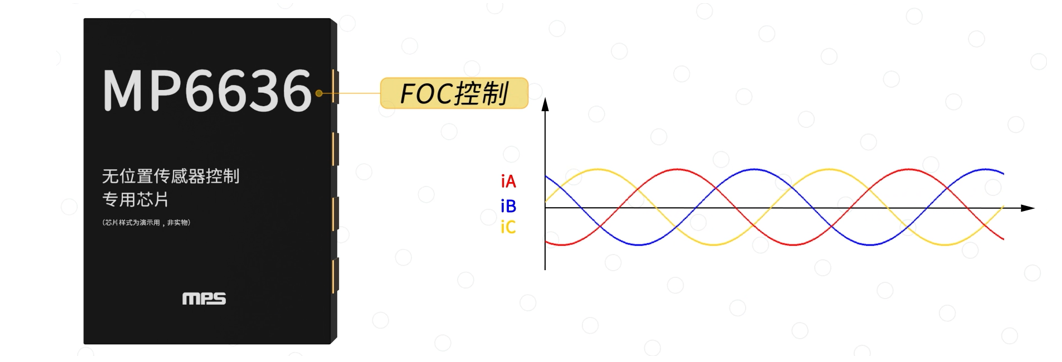
圖5:三相BLDC無位置傳感器控制芯片MP6636
-
傳感器
+關注
關注
2577文章
55272瀏覽量
792876 -
MOSFET
+關注
關注
151文章
10087瀏覽量
234287 -
電機
+關注
關注
143文章
9653瀏覽量
154500 -
BLDC
+關注
關注
220文章
935瀏覽量
100509
原文標題:【電源小課堂】BLDC無位置傳感器控制
文章出處:【微信號:MPS芯源系統,微信公眾號:MPS芯源系統】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論