了解CAN總線的人都知道,CAN總線在的幀數據在總線上傳送時,其它的CAN控制器是通過驗收濾波來決定總線上的數據幀的ID是否和本節點相吻合
2015-10-26 14:10:08 3548
3548 
MCS-51單片機組成CAN通信系統需要擴展CAN控制器,本系統采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:007025 
在ISO 11898-2和ISO 11898-3中分別規定了兩種CAN總線結構(在BOSCH CAN2.0規范中,并沒有關于總線拓撲結構的說明):高速CAN總線和低速CAN總線,區別表如下所示。
2023-04-07 09:30:184053 
嵌入式的工程師一般都知道CAN總線廣泛應用到汽車中,其實船艦電子設備通信也廣泛使用CAN,隨著國家對海防的越來越重視,對CAN的需求也會越來越大。這個暑假,通過參加蘇州社會實踐,去某船舶電氣公司實習幾周,也借此機會,學習了一下CAN總線。
2023-04-11 09:30:091222 這意味著變送器通過CAN收發器改變總線電平,并將其信息傳輸到CAN總線。接收器通過監測總線電平將總線上的信息讀取到自己的CAN收發器中。
2024-02-19 14:53:5410585 
發送數據,這被稱作遠程發送請求(RTR)。除此以外,CAN協議還有一個優點,當總線新加入一個節點進行通信時無需更改原有的程序,新節點只要通過ID就可以知道是接收還是丟棄數據。 CAN協議定義了四
2017-10-19 11:12:46
起源在沒有CAN總線之前,所有外設和控制器都是單線連接,導致線布局和數量巨大,錯綜復雜。總線的含義就是所有信息都在這根線上傳輸,當然,CAN總線是兩根。CAN協議概念CAN是Controller
2021-08-20 07:17:29
CAN總線基礎學習,可以幫大家更好了解CAN總線
2013-11-07 13:12:55
IICSPICAN485USB工業以太網EtherCATEtherCAT傳輸性能EtherCAT應用層協議層CoE協議現場總線最近的實驗需要較高的運動控制速率。市場上大部分的驅動板目前只支持CAN通信。畢竟CAN通信配置簡單
2021-08-06 07:44:19
總線系統設計奠定基礎。第4—9章重點講解CAN總線系統硬件設計和程序設計,以幫助讀者熟悉該系統的硬件資源,也是單片機學習者很好的學習范例;同時給出CAN總線自發收、兩點通信、多點通信、CAN
2014-12-30 16:01:59
上周學習了Modbus協議的內容,后面幾周晚上學習下Can總線。這幾天晚上一直在看CanOpen協議源碼,現在開始整理筆記,雖然網上有很多大牛寫過,我還是自己記錄下,這樣印象才深刻。文章目
2021-08-23 08:44:20
STM32 CAN總線通信學習筆記(一)一、CAN總線簡介CAN 是控制器局域網絡(Controller Area Network, CAN)的簡稱。CAN采用數據塊編碼的方式,數據塊根據幀的類型
2021-08-19 06:04:04
串行數據通信協議。目前,CAN 總線已經被列入 ISO 國際標準,稱為 ISO11898。CAN 總線已經成為工業數據通信的主流技術之一。CAN 總線作為數字式串行通信技術,與其他同類技術相比,在可靠性
2018-12-13 14:26:31
基于FPGA的CAN總線通信系統為了克服單片機固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實現CAN總線數據通信的方法; 介紹了
2012-08-11 11:55:19
在開發板上有CAN總線,怎樣來進行CAN總線的通信呢?希望能普及一下這方面的知識或者提供些相關的例程。如果有高手做過,請介紹一下開發的過程。
2019-09-30 04:35:02
基于STM32的CAN總線通信學習筆記本文主要簡單介紹CAN總線的相關概念,以及通信協議等知識,和使用STM32自帶的bxCAN外設進行CAN總線編程實驗,以及編程心得。1. CAN總線簡要介紹概念:CAN是控制器局域網絡(Controller Area Netwo...
2021-08-19 07:23:37
介紹CAN 總線及其通信協議J1939, 并設計基于CAN 總線的多ECU 通信平臺的硬件結構; 闡述節點ECU 通信的軟件設計方法,在仿真試驗的條件下實現數據通信的功能。試驗表明該平臺運行
2009-04-15 09:49:53 22
22 本文針對賓館、酒店的客房控制和管理系統,介紹了基于CAN 總線的客房通信控制器的硬件電路結構、原理及軟件結構和主程序流程。關鍵詞:CAN 總線;現場總線;通信技術;樓
2009-06-13 12:06:0313 本文研究 CAN 總線在電梯串行通訊中的應用。論文對比RS-485 通訊方式,分析CAN 總線應用于電梯串行通訊中的優點,采用SJA1000 設計了CAN 總線通訊硬件,優化CAN總線的通信參數,提高
2009-06-25 13:28:0341 鑒于目前基于RS-485通信的監控系統的一些問題,本文闡述了用微控制器P87C591和現場總線技術實現基于CAN總線的監控系統,還詳細說明了RS-232與CAN總線轉換器和基于CAN總線的云臺控制
2009-07-09 10:06:4736 本設計為光電穩定跟蹤平臺開發CAN 驅動,以實現CAN 總線上設備間的通信。分析了linux 下標準設備驅動機制和CAN 總線通信模型,給出了光電穩定跟蹤平臺中CAN 總線通信的硬件設計
2009-08-04 08:33:4830 CAN總線是一種應用極為普及的現場總線。文中提出了一種CAN總線通信接口的設計方案。CAN總線智能節點用單片機AT89S52和SJA1000控制器為核心組成。分別從硬件電路設計和SJA1000軟件
2010-01-25 15:04:2252 摘要:介紹CAN總線及其通信協議J1939,并設計基于CAN總線的多ECN通信平臺的硬件結構;闡述節點ECN通信的軟件設計方法,在仿真試驗的條件下實現數
2006-03-11 13:21:032063 
CAN總線通信電路
2008-10-14 13:59:176881 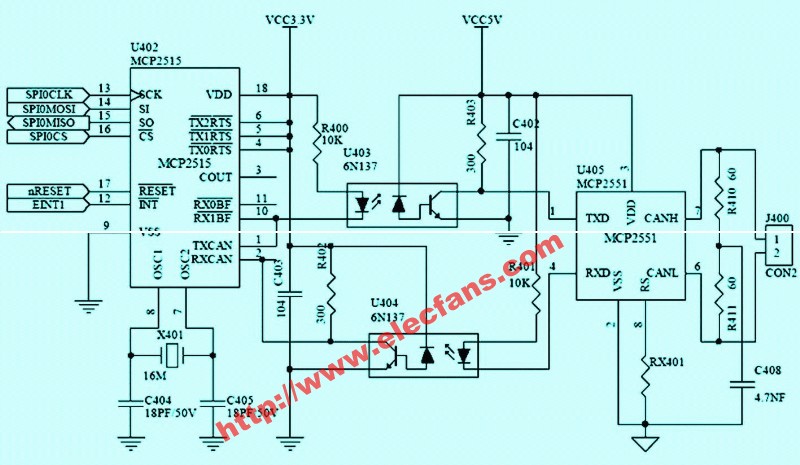
CAN總線通信硬件原理圖(采用TJA1050T CAN總線驅動器)
F040中內置CAN總線協議控制器,只要外接總線驅動芯片和適當的抗干擾電路就可以很方便地建立一
2009-11-13 12:18:1435131 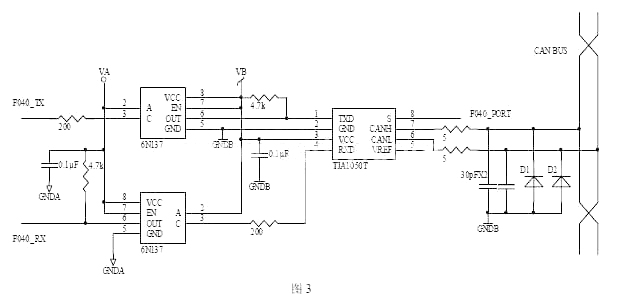
CAN總線與RS-485總線的通信接口設計
1 CAN總線及RS-485總線簡介 CAN總線(Controller Area Network)是由德國Bosch公司于20世紀80年代專門為汽車電子控制系統
2010-01-27 10:46:075054 
設計了多個CAN總線的通信節點,通過PCI9810-CAN適配卡上的CAN總線,組成一個局域通信網絡,實現了PC機對各個節點的監控和通信以及節點間的自由通信。
2011-10-19 14:57:5668 本文介紹了CAN 總線的主要性能及特點,CAN 總線在實際工業應用中的總體結構,同時給出了CAN 總線協議轉換器的硬件設計方法和通信協議。主要研究了CAN 總線接口電路設計,把所設計的
2011-10-31 15:01:47463 文中分析了CAN總線的發展和汽車CAN總線技術的特征,對CAN總線在汽車領域的應用進行了深入的探討。
2011-12-14 14:58:1086 基于對CAN 總線控制器的功能分析, 并應用Verilog語言進行軟件設計, 從而實現CAN節點之間的通信功能。
2012-04-28 09:56:5415287 
基于CAN總線系統結構構成,通過工程實踐的具體應用以及對CAN控制器及收發器硬件結構的深入理解,并從通信的角度出發著重深入分析了CAN總線通信的節點同步機制、總線地址機制、總
2012-05-08 15:23:04404 CAN總線通信詳解。
2016-03-30 16:46:100 系統設計奠定基礎。第4—9章重點講解CAN總線系統硬件設計和程序設計,同時給出CAN總線自發收、兩點通信、多點通信、CAN—RS232網橋、溫控系統等綜合實例,讓讀者在學習和實踐中理解CAN總線的精髓。
2016-04-05 11:17:2318 系統設計奠定基礎。第4—9章重點講解CAN總線系統硬件設計和程序設計,同時給出CAN總線自發收、兩點通信、多點通信、CAN—RS232網橋、溫控系統等綜合實例,讓讀者在學習和實踐中理解CAN總線的精髓。
2016-04-05 11:18:2021 基于FPGA的CAN總線通信系統,下來看看。
2016-05-10 11:47:1337 電子專業單片機相關知識學習教材資料——CAN總線推薦電路
2016-09-13 17:23:280 CAN-bus現場總線基礎方案_通信
2017-02-07 17:16:4014 基于CAN總線的EPS通信系統研究
2017-01-14 11:27:1217 CAN總線通信協議的分析和實現 CAN總線通信協議以及其實現方法
2017-09-04 08:45:3340 CAN總線是什么?CAN總線定義是什么? CAN(Controller Area Network)是ISO國際標準化的串行通信協議。廣泛應用于汽車、船舶等。 CAN控制器通過組成總線的2根線
2017-12-27 13:40:0733009 
在各種現場總線中,CAN總線以其結構簡單、應用靈活方便而在工業過程控制和車輛中得到廣泛應用。在CAN的技術規范中,規定了CAN分為數據鏈路層和物理層兩層,用戶在設計通信軟件時,必須先根據需求設計合適
2018-01-08 15:01:029 CAN已經形成國際標準,并已被公認為幾種最有前途的現場總線之一。CAN 總線的數據通信具有突出的可靠性、實時性和靈活性。由于其良好的性能及獨特的設計,CAN總線越來越受到人們的重視,它在汽車領域上的應用是最廣泛的。接下來及跟隨小編一起來了解一下CAN總線的工作原理、特點及優缺點、應用領域及應用案例吧。
2018-05-07 10:36:3936240 
),是國際上應用最廣泛的現場總線之一。本文主要介紹了四款CAN總線通信典型電路原理圖,具體的跟隨小編一起來了解一下。
2018-05-07 15:38:03217224 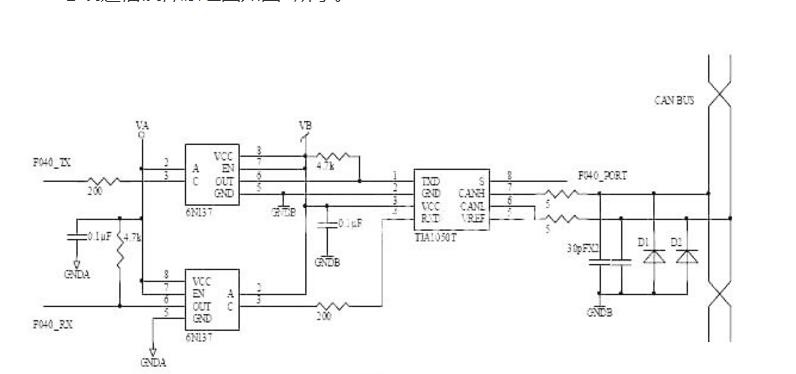
CAN總線通信是目前汽車電子和工業現場的主流通信,CAN總線憑其穩定性、時效性、抗干擾性、傳輸距離遠及低成本等特點,占領總線巔峰,但是隨著越來越多的電子產品的誕生,再加上工業現場等干擾,即使是CAN
2018-05-07 17:09:358383 本文說的CAN即是一種總線,也是一種協議。因此,我們常聽見CAN總線,也常聽見CAN協議。CAN協議和CANOpen協議是兩套不同的協議。從軟硬件層次來劃分,CAN協議屬于硬件協議,而CANOpen
2018-10-03 19:53:0076048 
本文檔的主要內容詳細介紹的是CAN總線教程之CAN總線的十個學習資料合集免費下載主要內容包括了:一,BOSCH CAN V20 二,CAN 發展史 三,CAN基本知識 四,CAN通信 五
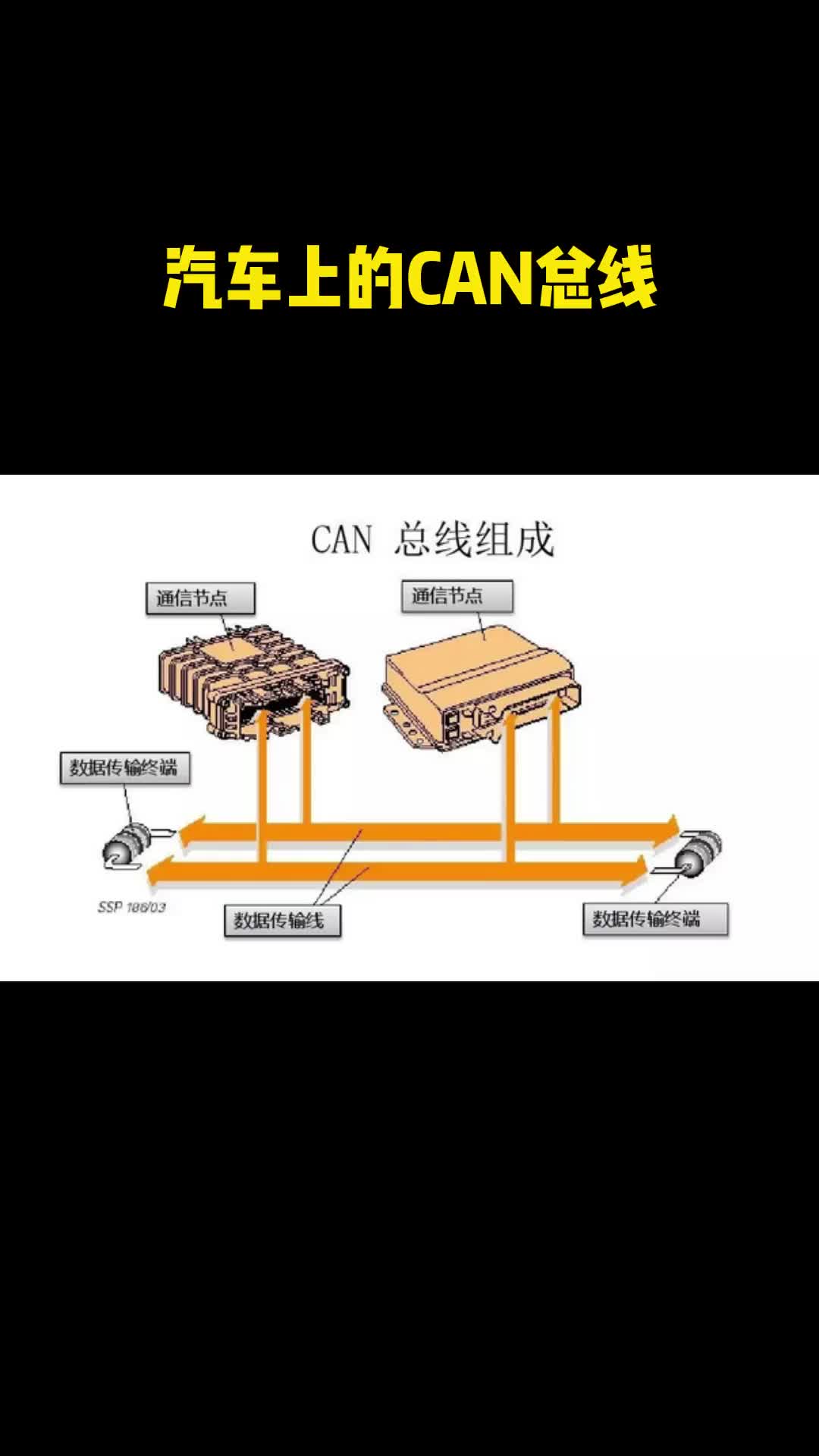
2018-11-22 17:36:00222 CAN總線用戶接口簡單,編程方便。網絡拓撲結構采用總線式結構。這種網絡結構簡單、成本低,并且采用無源抽頭連接,系統可靠性高。通過CAN總線連接各個網絡節點,形成多主機控制器局域網(CAN)。信息的傳輸采用CAN通信協議,通過CAN控制器來完成。
2018-11-28 17:16:0319155 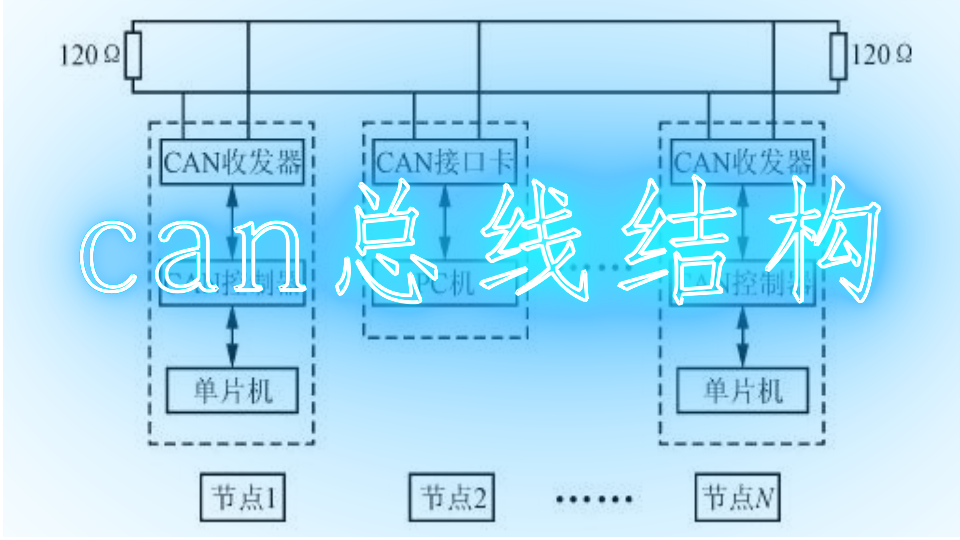
為了弄清CAN總線是否完好工作,必須觀察總線上的通信情況。在這種情況下不需要分析單個位,而只需要觀察CAN總線是否工作。示波器測量說明: “CAN總線很可能無故障工作”。
2018-11-28 17:22:4110210 本文檔額度主要內容詳細介紹的是CAN總線教程之CAN總線快速入門資料免費下載主要內容包括了:CAN總線概述,數據鏈路層,物理層
2018-12-07 17:20:39221 CAN(Controller Area Network)即控制器局域網,屬于工業現場總線的范疇,通常稱為CAN-bus,即CAN總線,它是目前國際上應用最廣泛的開放式現場總線之一,與一般的通信總線
2020-01-15 08:00:007 功能,讓每個節點對報文有選擇性地做出響應。 總線使用不歸零位填充。模塊以線與邏輯連接到總線:如果只有一個節點向總線傳輸邏輯0,那么不管有多少個節點向總線傳輸邏輯1,整個總線都處于邏輯0狀態。 CAN標準定義四種不同的報文類型。報文使用
2020-04-03 15:32:2215223 本文在分析can總線航天應用的基礎上,從硬件原理設計、cpu與can總線接口實現以及can總線通信軟件設計等方面進行了論述。
2020-04-02 09:53:064286 
CAN總線是與串行總線不同的工業控制通信系統,是德國博世公司為提供汽車電子產品的升級服務,所有它更多的用于汽車控制。為什么它非常適合汽車行業呢?
2020-11-02 10:52:2137480 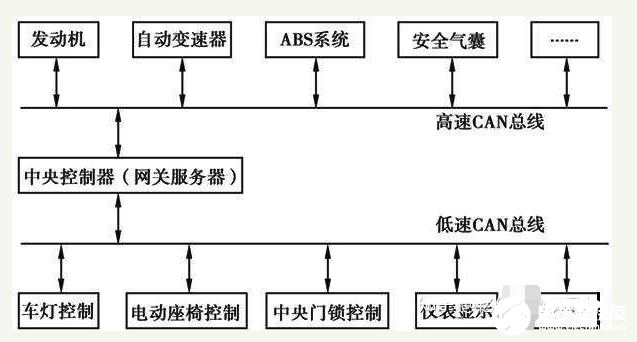
CAN總線作為一種工業界的流行總線廣泛應于工業自動化、多種控制設備、交通工具、醫療儀器以及建筑、環境控制等各個行業中,它是是一種多主機局域網,所以這樣一種總線的潛力是很巨大的,接下來將寫幾篇入門
2020-11-19 17:24:4726 CAN總線通信協議詳細如下。
2021-04-19 16:54:3879 在現場總線概念的出現到現在的近20年時間里,已經出現了好幾種現場總線技術并走向成熟。其中CAN總線已被公認為幾種最有前途的現場總線之一。CAN是一種由帶有CAN控制器組成的高性能串行數據局域通信網絡,是國際上應用最廣泛的現場總線之一。
2021-04-20 15:55:3024 以MSCAN08和MSCAN12為示例,講述CAN現場總線,初步掌握CAN總線技術的應用。
2021-04-20 16:12:35298 總線是當今自動化領域技術發展的熱點之一,被譽為自動化領域的計算機局域網。 一般工程師們都知道在汽車中大部分都會用到CAN總線,其實還有許多的船艦電子設備通信也會用到CAN總線,現在CAN總線的適用范圍越來越廣泛。 CAN總線的優勢是網絡各節點之間的數據通信實時性強、開發
2021-08-07 16:37:1321073 Can通信接口學習筆記
2021-12-08 16:36:0630 ),是一種用于實時應用的串行通訊協議總線,它可以使用雙絞線來傳輸信號,是世界上應用最廣泛的現場總線之一。CAN協議用于汽車中各種不同元件之間的通信,用來取代昂貴而笨重的配電線束。CAN協議的使用廣泛這一特點使其很快延伸到自動化控制以及工業領域中。 CAN協議的特性包括完
2022-01-15 17:04:486523 在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關知識,包括CAN總線錯誤的基礎概念、CAN總線錯誤的類型、CAN錯誤幀和CAN節點錯誤狀態,并通過實際的應用測試生成并記錄CAN錯誤。
2022-06-13 16:08:349243 高速CAN總線上為顯性電平(邏輯0)時,CAN_H為3.5V、CAN_L為1.5V,此時電壓差是2V,顯性狀態的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時,CAN_H和CAN_L都為2.5V,此時電壓差就是0V,隱性狀態的CAN總線電壓范圍。
2022-09-13 16:57:225992 【導讀】介紹了CAN總線與伺服電機的特點,并討論了伺服電機基于CAN總線的通信控制特性。
2022-12-27 10:57:569587 即從CAN控制芯片輸出邏輯電平到CAN收發器,然后經過CAN收發器內部轉換將邏輯電平轉換為差分信號輸出到CAN總線上,CAN總線上的節點都可以決定自己是否需要總線上的數據。
2023-03-29 10:06:1611153 點擊上方 藍字 關注我們 摘要:以FPGA 代替傳統的單片機和外圍擴展芯片, 給出了CAN 總線通信節點的詳細設計方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設計實現通信
2023-06-18 11:15:014210 AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關知識,包括CAN總線錯誤的基礎概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-05-27 10:39:215790 
點擊關注,電磁兼容不迷路。什么是CAN總線CAN總線是一種廣泛用于汽車、工業自動化和其他領域的串行通信協議。它允許多個設備共享通信線路,傳輸數據以及控制信號。CAN總線有兩個不同的版本
2023-04-21 09:42:312299 
CAN總線 CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協議。在汽車產業中,出于對安全性、舒適性、方便性、低功耗、低成本的要求
2023-07-18 11:10:464302 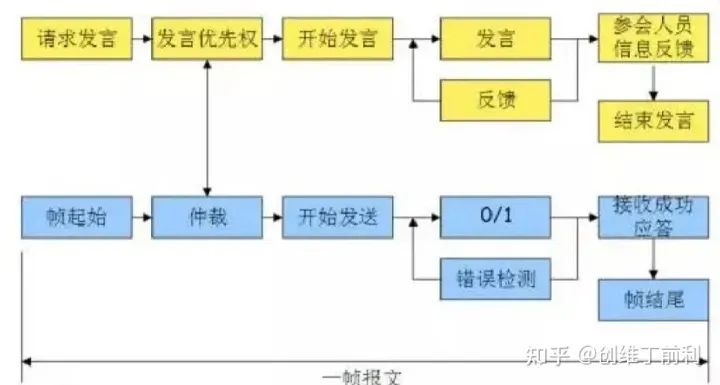
認識CAN 總線錯誤的第一步就是了解認識CAN 總線協議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發現并解決錯誤的。
2023-08-14 15:18:469294 
can總線負載率多少合理? CAN總線是一種控制器區域網絡,它是用于在不同設備之間進行通信的技術。CAN總線的應用領域廣泛,例如汽車、航空航天、醫學儀器等。在CAN總線中,數據通過網絡傳輸,并且在
2023-09-07 15:05:414877 can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數據通信協議,廣泛用于汽車、航空、船舶、工業自動化、機器人等領域。CAN總線采用串行通信方式,主要用于實現多個模塊之間的通信
2023-09-14 16:48:057576 CAN總線 CAN是控制器局域網絡的簡稱,是一種能夠實現分布式實時控制的串行通信網絡。CAN總線的功能復雜且智能。 CAN總線網絡主要掛在CAN_H和CAN_L,各個節點通過這兩條線實現信號的串行差
2023-11-09 18:11:503505 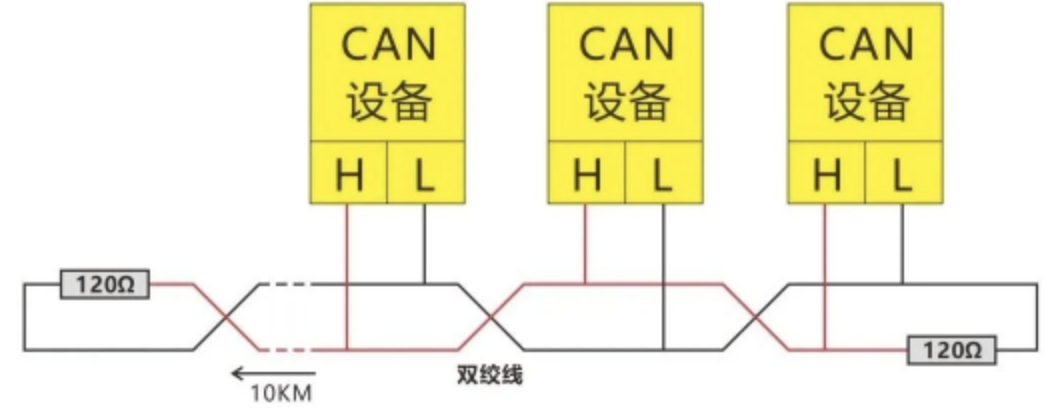
can總線傳輸距離? CAN總線是一種串行通信協議,常用于汽車行業中的數據通信。它被廣泛應用于車載電子系統,如發動機控制單元、制動系統、儀表盤和空調控制系統等。CAN總線的主要優勢在于其高可靠性
2023-12-07 18:09:405414 CAN總線通訊協議由德國博世于上世紀80年代發明,第一個使用CAN總線通訊協議的量產車型是1991年的奔馳S級轎車,至今CAN總線依舊是車內主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開始
2023-12-21 14:03:455389 
CAN總線共模電感是應用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問題。本文將詳細介紹CAN總線共模電感的定義、作用、選型要點以及常見注意事項,并且結合實際案例進行分析
2024-01-05 13:42:347297 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數據傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:014359 CAN總線(Controller Area Network)是一種用于汽車和工業自動化領域的通信協議。它具有高可靠性、實時性和靈活性的特點。然而,在使用過程中,CAN總線也可能出現一些故障。本文將
2024-06-16 10:04:583672 CAN總線(Controller Area Network)是一種廣泛使用的現場總線通信協議,主要用于汽車、工業控制等領域。在CAN總線通信中,中斷狀態是一個重要的概念,它涉及到CAN總線節點在通信
2024-06-16 10:21:373476 CAN總線隔離模塊是一種用于保護CAN總線通信系統的電子設備,它通過在CAN總線和CAN節點之間增加一層隔離層,來防止電氣干擾、電壓沖擊和故障傳播等問題,從而確保CAN總線系統的穩定運行和數
2024-06-16 10:32:503824 CAN總線控制器(Controller Area Network Bus Controller)是CAN總線通信系統中的核心部件,它扮演著接收、處理并轉發CAN總線數據的關鍵角色。下面將從CAN總線控制器的定義、功能、結構、工作原理以及應用等方面進行詳細闡述。
2024-09-03 14:16:173266 CAN總線錯誤狀態的種類主要包括以下幾種,每種狀態都反映了CAN總線網絡中節點或總線的不同錯誤情況,以及相應的通信能力和限制。
2024-09-03 14:17:314814 一、CAN總線概述 CAN總線是一種多主控制的串行通信協議,它允許多個設備共享同一通信線路,而無需中央控制單元。這種設計使得CAN總線非常適合于分布式控制系統,如汽車電子系統。 二、CAN總線
2024-11-12 09:46:514531 CAN總線(Controller Area Network)是一種多主控制的串行通信協議,廣泛應用于汽車電子、工業自動化等領域。它以其高可靠性、實時性和靈活性而受到青睞。Arduino作為一個
2024-11-12 10:09:173772 隨著汽車電子系統的復雜性增加,車輛內部通信的需求也在不斷增長。CAN總線和LIN總線作為兩種主要的車載通信協議,各自扮演著重要的角色。 1. 設計原理 CAN總線: 數據傳輸速率: CAN總線支持
2024-11-12 10:13:386694 使用CAN總線的注意事項 電氣特性 :CAN總線對電氣特性有嚴格的要求,包括電壓水平、終端電阻、電纜長度等。確保遵循CAN總線規范中的電氣參數,以保證通信的穩定性。 拓撲結構 :CAN總線通常采用
2024-11-21 10:16:582098 CAN總線(Controller Area Network)是一種串行通信協議,主要用于汽車電子控制單元之間的通信。它由Bosch公司在20世紀80年代初開發,因其可靠性、實時性和靈活性而廣泛應用
2024-11-21 10:21:513467 CAN(Controller Area Network)總線是一種常用于汽車和工業控制系統的串行通信協議,以其高可靠性和實時性而聞名。Arduino,作為一種流行的開源微控制器平臺,可以通過附加
2024-12-23 09:06:442997 CAN總線模擬器的使用指南 CAN總線模擬器(如ICSim)是一種用于模擬CAN總線通信的工具,它可以幫助用戶在沒有實際硬件的情況下進行CAN總線通信的測試、調試和學習。以下是一個基本的CAN總線
2024-12-23 09:16:303875
 電子發燒友App
電子發燒友App


















 工商網監
工商網監
評論