 如何驗證ROS是否安裝成功 ubuntu20.04教程
如何驗證ROS是否安裝成功 ubuntu20.04教程

驗證ROS是否安裝成功
按正常來說ROS到這里就安裝完成了,現在我們來驗證一下,輸入以下命令:
roscore
如果出現了以下的問題:Command ‘roscore’ not found, but can be installed with:sudo apt install python3-roslaunch,按照提示輸入sudo apt install python3-roslaunch命令并執行,成功后界面如下:
如果出現了以下的問題說明,之前的安裝沒有安裝全
輸入以下命令,把沒安裝的安裝一下就好了(如果顯示有幾個安裝包無法下載,是因為網絡的原因重新輸入以下命令就行了)
sudo apt install ros-noetic-desktop-full
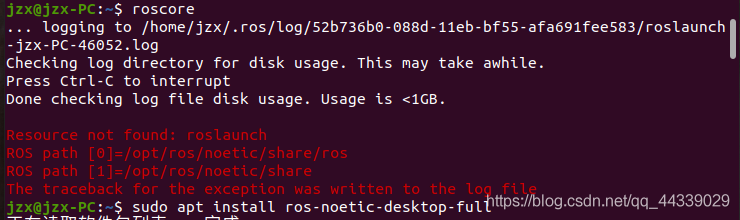
如果出現了以下的問題:

可嘗試輸入以下命令:
source /opt/ros/noetic/setup.bash
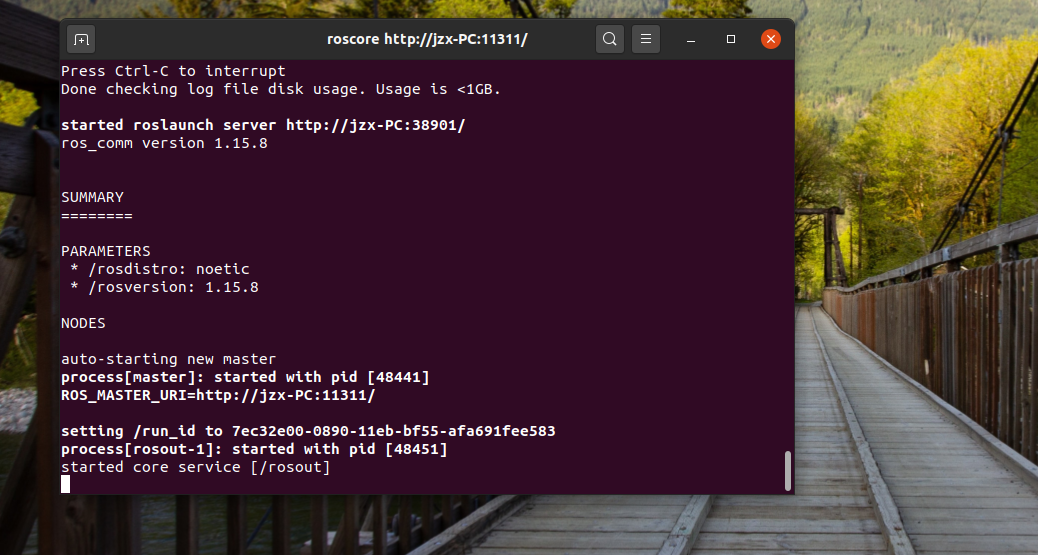
到這里再輸入roscore看一下,若安裝成功會顯示如下界面:
然后我們啟動一下小海龜的仿真器試一試,按ctrl+alt+t打開一個新的終端,輸入以下命令:
rosrun turtlesim turtlesim_node
按ctrl+alt+t再打開一個新的終端,輸入以下命令:
rosrun turtlesim turtle_teleop_key
這時候你按鍵盤上的↑↓←→鍵就可以控制小海龜移動了,那么恭喜你的ROS已經成功安裝完了。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
命令
+關注
關注
5文章
755瀏覽量
23752 -
Ubuntu
+關注
關注
5文章
613瀏覽量
33366 -
ROS
+關注
關注
1文章
293瀏覽量
18723
發布評論請先 登錄
相關推薦
熱點推薦
怎樣利用Ubuntu20.04去安裝Mentor Calibre 2020?
怎樣利用Ubuntu20.04去安裝Mentor Calibre 2020?有沒有人遇到過這個問題啊
發表于 06-23 07:19
如何搭建交叉編譯環境?如何驗證是否安裝成功?
[td]A40i板子在linux編譯篇4.5中寫到編譯前需要確保已經搭建好交叉編譯器環境,即交叉編譯器安裝成功。但是并沒有提到如何搭建交叉編譯環境,也沒有提到如何驗證是否安裝成功。
發表于 01-13 06:09
在Ubuntu20.04系統中,如何將Vivado編輯器配置成Vim?
我現在使用的系統是ubuntu20.04,安裝了2022.1版本的vivado,我想將vivado的編輯器設置成vim,但是我一直無法成功。我嘗試將“/usr/bin/vim"添加到
發表于 01-31 10:29
如何制作ubuntu20.04的文件系統
firefly自帶的文件系統,由于缺少一些基本功能模塊,因此,我們可以自己手動制作一個ubuntu20.04的文件系統。
【ROC-RK3568-PC開發板試用體驗】Ubuntu20.04桌面系統體驗升級與GCC安裝
本文來源電子發燒友社區,作者:李先生, 帖子地址: https://bbs.elecfans.com/jishu_2303743_1_1.html 本視頻進行Ubuntu20.04桌面系統體驗 并升級系統 安裝GCC 體驗視頻詳見作者原貼

ubuntu20.04安裝教程
Ubuntu 20.04 的安裝步驟如下: 制作啟動U盤。首先下載Ubuntu 20.04的鏡像文件和UltraISO(鏡像制作工具)。然后
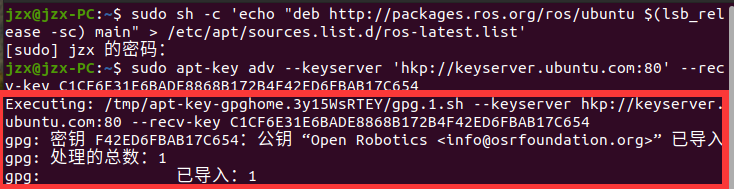
如何在ubuntu20.04中添加和更新ROS軟件源
1.添加ROS軟件源 將下面這條命令復制到ubuntu的終端執行 sudo sh -c '. /etc/lsb-release echo "deb http
ubuntu20.04設置環境變量方法
設置環境變量 輸入下面的這行代碼,注意到底是melodic還是noetic或者是kinetic是由你的ubuntu的版本決定的,比如我的ubuntu是20.04版本的,對應的是noetic,也就
【北京迅為】iTOP-LS2K0500開發板快速使用編譯環境ubuntu20.04第一章加載迅為提供 Ubuntu20.04
【北京迅為】iTOP-LS2K0500開發板快速使用編譯環境ubuntu20.04第一章加載迅為提供 Ubuntu20.04
Ubuntu20.04取消root賬號自動登錄的方法,觸覺智能RK3568開發板演示
Ubuntu20.04默認情況下為root賬號自動登錄,本文介紹如何取消root賬號自動登錄,改為通過輸入賬號密碼登錄,使用觸覺智能EVB3568鴻蒙開發板演示

系統適配 | RK3588適配Ubuntu20.04發布預告
前言:為了滿足廣大開發者與嵌入式愛好者的需求!眺望電子正式宣布,已完成基于瑞芯微RK3588的開發板對Ubuntu20.04LTS操作系統的深度適配與優化。此次適配不僅成功移植了

系統適配 | RK3576適配Ubuntu20.04正式發布
前言:為了滿足廣大開發者與嵌入式愛好者的需求!眺望電子正式宣布,已完成基于瑞芯微RK3576的開發板對Ubuntu20.04LTS操作系統的深度適配與優化。此次適配不僅成功移植了



 工商網監
工商網監
評論