") 2026年,3DGS和世界模型,在自動駕駛仿真中的組合應(yīng)用
2026年,3DGS和世界模型,在自動駕駛仿真中的組合應(yīng)用

寫在前面:作為自動駕駛仿真的核心支撐,3DGS與世界模型的技術(shù)落地一直備受關(guān)注。我們看到了車路漫漫的一篇文章,探討了3DGS與世界模型的路線差異,并開箱了aiSim軟件的3DGS功能,從效果對比、流程優(yōu)化及與“世界模型”互補(bǔ)等角度,給大家?guī)Я肆诵袠I(yè)一線的技術(shù)思考。
從行業(yè)角度來看是一篇難得的務(wù)實(shí)分享,特此轉(zhuǎn)載,供大家學(xué)習(xí)交流探討。
大家好呀,我是李慢慢。
先說結(jié)論:
2026年,自動駕駛仿真賽道將持續(xù)升溫。
回顧2025年,兩大仿真新技術(shù)快速走進(jìn)公眾視野,分別是世界模型(World Model)與3DGS(3D Gaussian Splatting,3D高斯?jié)姙R)。
關(guān)于世界模型,此前也寫了挺多科普文章,甚至發(fā)布了一些視頻效果,感興趣的小伙伴可以去后臺搜了看看,本文就不展開了。
而關(guān)于3DGS,我則一直覺得很神秘,因此特地做了一些探索,甚至申請到了商用軟件來試用,因此本文就3DGS怎么嵌入到自動駕駛仿真流程中,做一些膚淺的探索。
1、3DGS與世界模型的路線差異
3DGS和世界模型,聽起來都很“高大上”。
雖然都是在做仿真,但在我看來是兩種截然不同的技術(shù)路線。本文不談公式和理論,我們盡量用通俗的語言快速理解其核心邏輯。
一句話總結(jié)世界模型:AI 構(gòu)建的數(shù)字世界模擬器,復(fù)刻現(xiàn)實(shí)規(guī)律,能推演事件發(fā)展與結(jié)果。例如,向世界模型輸入一段視頻、圖片或文字描述,它就能自動生成后續(xù)連貫的視頻內(nèi)容。
一句話總結(jié)3DGS:這是一種基于點(diǎn)云優(yōu)化的3D高斯分布表征技術(shù),可實(shí)現(xiàn)高保真動態(tài)三維場景的快速渲染。簡單來說,它是一種革新性的三維建模技術(shù)——使用者只需手持掃描設(shè)備對目標(biāo)物體或場景掃描一圈,就能直接生成對應(yīng)的三維模型(過程如下圖所示)。這種模型的細(xì)節(jié)紋理與真實(shí)世界高度貼合,使得整個仿真過程兼具高效性與逼真度,對傳統(tǒng)三維建模技術(shù)形成了降維打擊。

圖片來源:視頻號-扎克力
所以,你看出來了嗎?3DGS與世界模型屬于兩條截然不同的技術(shù)路線。
3DGS是在傳統(tǒng)仿真技術(shù)的基礎(chǔ)上,對三維建模環(huán)節(jié)進(jìn)行革新,屬于“老樹開新花”的迭代升級;
世界模型則走的是AIGC技術(shù)路線,通過直接生成所需仿真數(shù)據(jù),完全跳過三維建模步驟,屬于“大力出奇跡”的顛覆式創(chuàng)新。
前者,我愿稱之為基于規(guī)則的仿真,rule-based simulation。
后者,我愿稱之為基于端到端的仿真,e2e-based simulation。
沒想到吧,智駕領(lǐng)域的技術(shù)路線之爭,也在仿真賽道同步上演。
扯遠(yuǎn)了,還是來繼續(xù)看看,3DGS到底能不能解決傳統(tǒng)仿真技術(shù)中“自動駕駛感知仿真難”的痛點(diǎn)吧。
2、實(shí)操驗(yàn)證:aiSim軟件的3DGS功能開箱體驗(yàn)
感知仿真難,也就是傳感器的仿真難。
自動駕駛最重要的三類傳感器:攝像頭、激光雷達(dá)、毫米波雷達(dá)。其中,激光雷達(dá)與毫米波雷達(dá)的感知置信度難以量化定義,因此本文以攝像頭仿真為例,直觀呈現(xiàn)3DGS在智駕仿真中的實(shí)際效果——畢竟攝像頭仿真的逼真度,可通過肉眼做個簡單判斷。
此前我曾介紹過一些3DGS開源工具,但這類工具的易用性普遍欠佳。而在商用仿真軟件中,目前已知僅aiSim搭載了3DGS功能。為此,我特意向康謀科技(原虹科自動駕駛事業(yè)部)申請了試用許可(license),完成了初步的開箱體驗(yàn)。

圖片:aiSim仿真界面-GUI
作者寄語:使用aiSim的感覺和傳統(tǒng)的仿真?zhèn)鞲衅黝愃疲彩且獎?chuàng)建地圖,然后編輯場景,然后配置主車的動力學(xué),配置各類傳感器,外接自動駕駛算法,做場景泛化和大規(guī)模仿真等等。如果你已經(jīng)掌握了一個仿真軟件,那么遷移到這個軟件應(yīng)該是非常快的,像我,就是線下找aiSim的小伙伴,花了半天就感覺已經(jīng)掌握它了(有點(diǎn)飄了哈哈),另外,aiSim也是支持xosc和xodr的,所以歷史的場景庫什么的遷移也是方便。
但是,這些都不是重點(diǎn),畢竟你有我有全都有,不值得說道。
但但是,aiSim集成了3DGS的功能,讓我著實(shí)覺得有點(diǎn)開眼界了。下面的軟件界面,做了一個對比,一個是調(diào)用的傳統(tǒng)手段建模的3D地圖,一個是調(diào)用的3DGS建模的3D地圖。結(jié)果就是,仿真效果肉眼可見的真實(shí)了不少。以前的仿真就像是放動畫片似的,調(diào)用3DGS地圖后,路面和外景等就更像是我們真實(shí)在道路上看到的效果了。

圖片:aiSim仿真界面-手搓地圖

圖片:aiSim仿真界面-3DGS地圖
以前覺得3DGS很神秘,但是使用軟件體驗(yàn)下來,發(fā)現(xiàn)唯一的變化竟然只是,搭建場景的時候選擇什么地圖。
這是什么意思呢?
具體來說,aiSim中的動態(tài)場景仍通過OpenSCENARIO協(xié)議設(shè)計,而對于協(xié)議中調(diào)用的靜態(tài)地圖(OpenDRIVE格式),既可以選用傳統(tǒng)工具(如RoadRunner)搭建的地圖(動畫感較強(qiáng),真實(shí)度有限),也可以選用3DGS生成的地圖(紋理細(xì)節(jié)更貼近真實(shí)場景)。以下視頻將直觀對比兩種建模方式的仿真效果。
視頻:傳統(tǒng)建模仿真 VS 3DGS建模仿真
可見,3DGS本質(zhì)上只是一種高效的建模手段。未來,它大概率會成為自動駕駛仿真軟件的一個標(biāo)準(zhǔn)化組件——用戶可選擇3DGS生成的靜態(tài)場景地圖,再在此基礎(chǔ)上定義動態(tài)場景,例如添加各類交通參與者,構(gòu)建完整測試場景。
視頻:3DGS建模仿真-添加交通參與者
淺嘗了一下aiSim的3DGS的仿真效果,接下來暢想一下未來3DGS應(yīng)用到自動還是仿真測試的流程。
如果3DGS能在解決感知仿真問題然取得突破,那么接下來的一些工程化應(yīng)用將成為重點(diǎn)。
3、流程變革:3DGS對仿真測試工作流的優(yōu)化
3.1. 傳統(tǒng)仿真測試流程
以前的傳統(tǒng)的仿真測試可能大概是這樣的:
- 1. 智駕產(chǎn)品定義中有新的功能需求發(fā)布啦;
- 2. 仿真小伙伴收到需求,開始構(gòu)思具體的測試用例該有哪些,以完整的覆蓋產(chǎn)品需求;
- 3. 測試用例制定完畢,交給上游產(chǎn)品們進(jìn)行評審,確認(rèn)無誤后就開始畫場景。一般都是基于某款仿真軟件徒手制作靜態(tài)地圖,然后定義各種動態(tài)場景,形成場景庫;
- 4. 在仿真工具鏈中集成被測對象(智駕軟件),然后開始進(jìn)行仿真測試;
- 5. 跑完一輪仿真測試,輸出測試報告,然后推動軟件開發(fā)進(jìn)行迭代;
3.2. 集成3DGS后的流程優(yōu)化
無需手動繪制地圖,通過3DGS快速生成——采集實(shí)景數(shù)據(jù)(如十字路口、特定車輛)導(dǎo)入工具,即可自動生成高精度三維模型/地圖,大幅縮短場景搭建周期,降低人工成本。
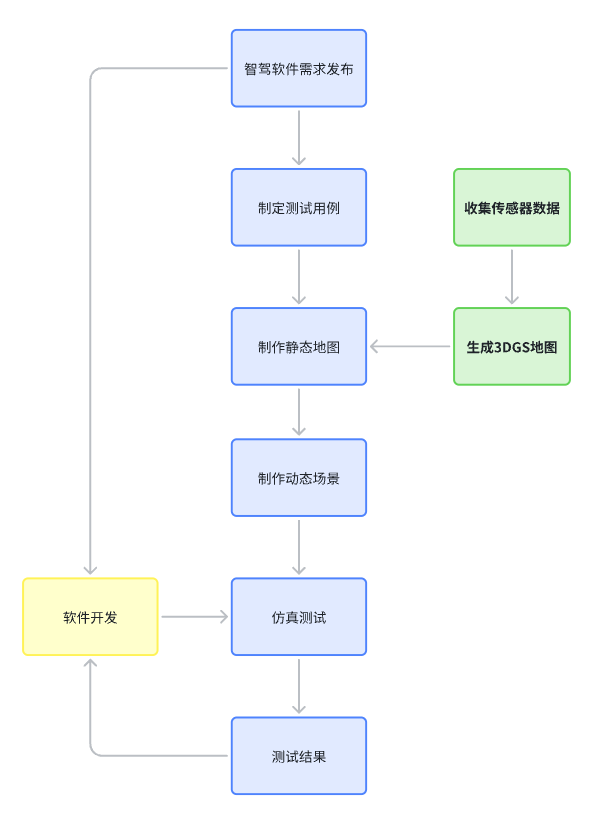
流程圖:3DGS在仿真測試的工作流
作者寄語:在使用aiSim的過程中,我發(fā)現(xiàn)相應(yīng)的地圖非常大,動輒幾十個G,這對于工程化部署非常不利,3DGS格式的3D地圖或者3D模型,必須支持客戶自定義編輯,以實(shí)現(xiàn)模型瘦身、局部細(xì)節(jié)調(diào)整、地圖組裝等功能,那么一款3DGS的可視化編輯器是非常有必要的。
4、展望:3DGS的潛力與局限
3DGS的核心價值的是解決“場景還原度與建模效率”的矛盾,未來大概率會成為自動駕駛仿真軟件的標(biāo)準(zhǔn)化組件。但它能否成為感知仿真的終極破局者,仍取決于兩大關(guān)鍵:一是海量實(shí)景數(shù)據(jù)的積累與訓(xùn)練,二是理論研究的深入(解決偽影、場景模糊等技術(shù)痛點(diǎn))。
值得注意的是,3DGS的技術(shù)門檻較高,并非企業(yè)可輕易自研,這或?qū)椭^部仿真軟件供應(yīng)商構(gòu)建核心競爭壁壘,進(jìn)一步促進(jìn)行業(yè)分化(各司其職-這在我看來才是一個健康的產(chǎn)業(yè))。在智駕端到端技術(shù)普及的當(dāng)下,唯有攻克仿真置信度難題,3DGS才能在閉環(huán)測試、訓(xùn)練數(shù)據(jù)生成等核心場景中發(fā)揮更大價值。
3DGS和世界模型的協(xié)同
3DGS并非自動駕駛仿真的“終極答案”,但無疑是破解感知仿真置信度困境的關(guān)鍵突破口。3DGS和世界模型并不是“非此即彼”的單選題,而是可以組合使用,互相取長補(bǔ)短,形成互補(bǔ)。
這種互補(bǔ)格局的核心的是技術(shù)短板互抵、能力邊界互補(bǔ),圍繞“高保真、高效率、全場景覆蓋”的核心需求形成協(xié)同范式:
1)3DGS以實(shí)景掃描為基礎(chǔ),提供高保真靜態(tài)場景基底,解決世界模型“虛擬失真”與“仿真-實(shí)車gap”問題,為其提供真實(shí)數(shù)據(jù)錨點(diǎn);
2)世界模型則憑借邏輯推演與場景生成能力,快速拓展長尾、極端場景,彌補(bǔ)3DGS對稀缺場景采集成本高、覆蓋不足的短板,同時借助3DGS的真實(shí)數(shù)據(jù)反哺自身優(yōu)化。
隨著兩者技術(shù)的持續(xù)迭代與商業(yè)化落地,這種“實(shí)景基底+虛擬拓展”的協(xié)同模式,將推動自動駕駛仿真從“輔助驗(yàn)證工具”向“核心閉環(huán)環(huán)節(jié)”轉(zhuǎn)型,為端到端智駕技術(shù)的快速落地提供核心支撐。
讓我們拭目以待吧。
-
仿真
+關(guān)注
關(guān)注
54文章
4482瀏覽量
138240 -
自動駕駛
+關(guān)注
關(guān)注
793文章
14879瀏覽量
179775
發(fā)布評論請先 登錄
如何構(gòu)建適合自動駕駛的世界模型?

3DGS技術(shù)詳解(一):3DGS如何融合動態(tài)天氣與光照等環(huán)境因素?

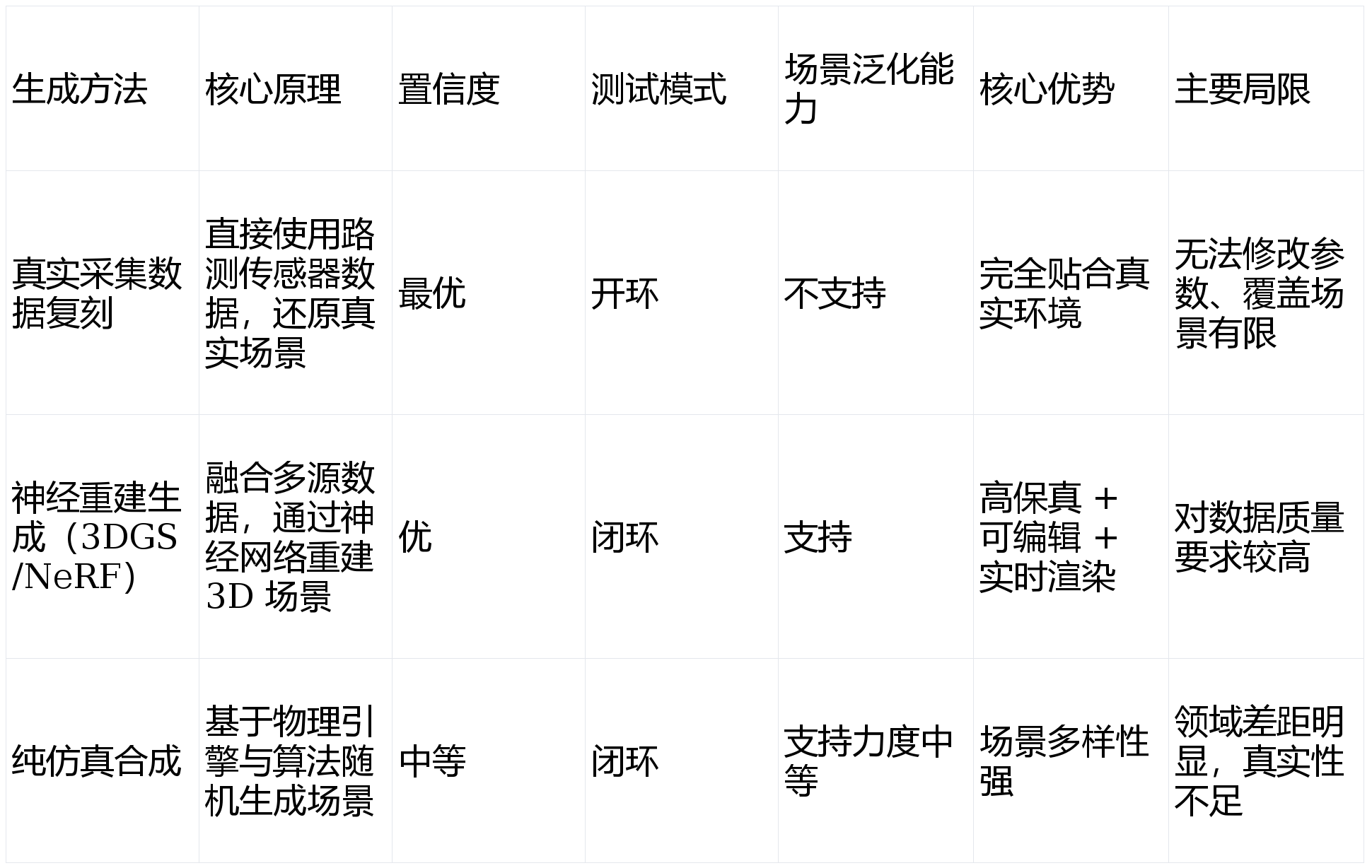
自動駕駛仿真測試場景生成方法:從技術(shù)突破到工程落地的全維度解析
自動駕駛場景生成方法及優(yōu)選方案:康謀aiSim 3DGS方案重塑行業(yè)標(biāo)準(zhǔn)
黃仁勛:未來十年很多汽車是自動駕駛 英偉達(dá)發(fā)布Alpamayo汽車大模型平臺
自動駕駛中常提的世界模型是什么?
摩爾線程在SIGGRAPH Asia 2025斬獲3DGS重建挑戰(zhàn)賽銀獎

世界模型是讓自動駕駛汽車?yán)斫?b class='flag-5'>世界還是預(yù)測未來?

從“重建”到“可用”:aiSim3DGS方案如何閉環(huán)自動駕駛仿真場景?
直播邀約 | 10月21日15點(diǎn),從三維重構(gòu)到仿真革新:3DGS技術(shù)解析與實(shí)踐應(yīng)用!
華為定下自動駕駛時間表 2026年實(shí)現(xiàn)高速L3規(guī)模商用
自動駕駛中常提的世界模型是個啥?

康謀方案 | 高精LiDAR+神經(jīng)渲染3DGS的完美融合實(shí)踐

技術(shù)分享 |多模態(tài)自動駕駛混合渲染HRMAD:將NeRF和3DGS進(jìn)行感知驗(yàn)證和端到端AD測試

康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關(guān)鍵技術(shù)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論