") 雨霧天氣,毫米波雷達表現(xiàn)為什么比激光雷達更好?
雨霧天氣,毫米波雷達表現(xiàn)為什么比激光雷達更好?

[首發(fā)于智駕最前沿微信公眾號]在自動駕駛領(lǐng)域,要讓汽車自己“看懂”周圍環(huán)境,必須借助激光雷達、毫米波雷達等傳感器。它們雖都用于探測周圍物體,但物理原理和應(yīng)對惡劣天氣的能力卻有明顯不同。
激光雷達,顧名思義,其核心是發(fā)射激光(通常為不可見的紅外光)探測物體。它向周圍環(huán)境發(fā)出激光脈沖,通過測量光束從發(fā)射到被物體反射回來的時間(即“飛行時間”測量原理),精確計算出目標(biāo)的距離、方位與輪廓。激光雷達能生成高密度的三維點云,可以為車輛繪制出周圍環(huán)境的精細“3D地圖”,從而使自動駕駛系統(tǒng)得以精準識別物體。
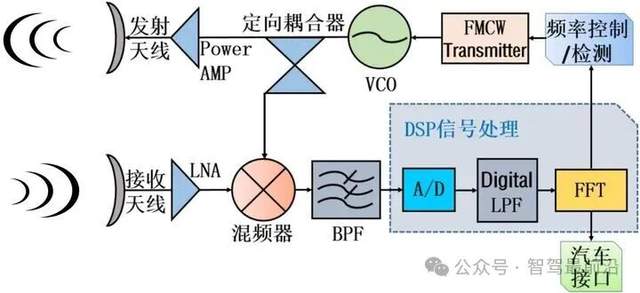
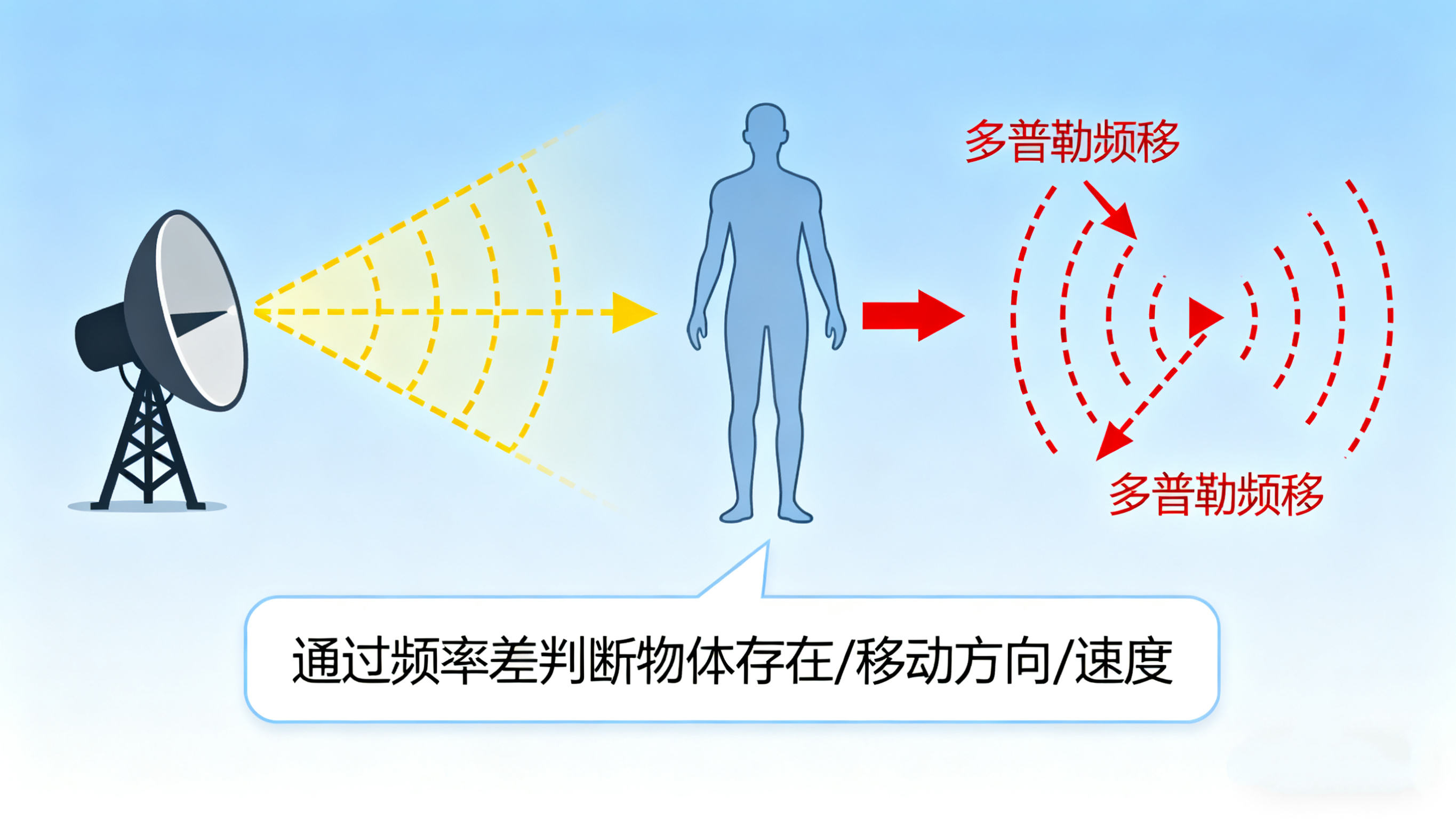
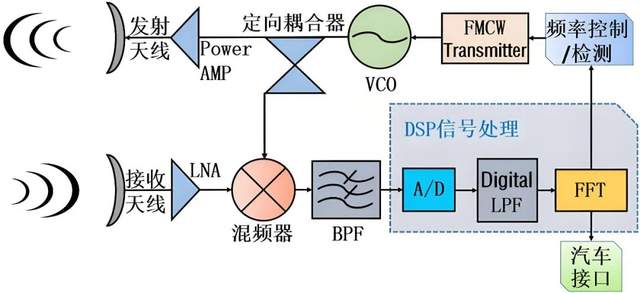
相比之下,毫米波雷達不是發(fā)光,而是發(fā)射無線電波。這種波的頻率比傳統(tǒng)雷達高很多,波長在毫米級別,因此叫做毫米波雷達。它發(fā)射電磁波,然后通過接收從物體反射回來的波來計算距離、速度和方向。毫米波雷達的分辨率不如激光雷達那么高,但它能夠同時測量目標(biāo)的速度信息,并且對惡劣天氣有更好的適應(yīng)性。
雖然激光雷達能給出非常細致的環(huán)境細節(jié),但在雨、霧、雪等惡劣天氣下表現(xiàn)會明顯下降;而毫米波雷達在這些環(huán)境下更穩(wěn)定、可靠。這背后的原因就在于它們使用的電磁波波長和與雨霧中微小水滴的物理作用機制。
波長決定了穿透能力
激光雷達與毫米波雷達之所以在惡劣天氣下有顯著的表現(xiàn)差異,其根源在于工作波長的不同。
激光雷達發(fā)射的光波波長非常短,一般處于900納米到1550納米范圍,這比可見光稍長一些。波長短意味著它在探測周圍物體時可以提供更高的空間分辨率,因此能夠準確獲取如行人手里的物品、路沿石邊緣等很多細節(jié)。這個特性對于精細的環(huán)境建模非常有用。
但短波長也會帶來一個問題,當(dāng)它遇到雨滴、霧滴或者空氣中懸浮的微粒時,這些微小顆粒會強烈散射和吸收激光光束。雨滴直徑會比激光波長大很多,這會讓光束在接近雨滴或者霧滴時發(fā)生散射,方向改變,甚至一部分能量被吸收掉。這種效果會讓原本應(yīng)該反射回傳感器的光變得微弱、混亂或者根本無法返回,導(dǎo)致傳感數(shù)據(jù)錯誤或者丟失。
毫米波雷達發(fā)射的電磁波波長較長,在1到10毫米之間。這一尺寸與雨滴直徑相當(dāng),但遠大于霧滴。因此,毫米波在傳播中遇到這些水滴時,不會像光波那樣發(fā)生嚴重的瑞利散射,而是發(fā)生米氏散射,其結(jié)果是信號僅產(chǎn)生部分能量衰減和輕微折射,大部分能量仍能向前傳播并被接收。這使得毫米波雷達在雨霧天氣中依然能保持可靠的探測能力。
為什么自動駕駛不能單靠一種傳感器?
解釋了上述物理現(xiàn)象之后,可能有人會問:既然毫米波雷達在雨霧天氣表現(xiàn)更穩(wěn),那為啥還有那么多汽車廠商堅持裝激光雷達?這要從它們各自的優(yōu)缺點說起。
激光雷達的最大優(yōu)勢是高精度和高分辨率。它可以生成密集的點云圖,把周圍環(huán)境的結(jié)構(gòu)勾勒得很清楚,這對自動駕駛系統(tǒng)判斷道路邊緣、行人姿態(tài)、靜止物體形狀等非常重要。毫米波雷達雖然能穿透惡劣天氣,但它提供的信息比較粗糙,分辨率低,難以單靠本身區(qū)分小物體和復(fù)雜的環(huán)境細節(jié)。
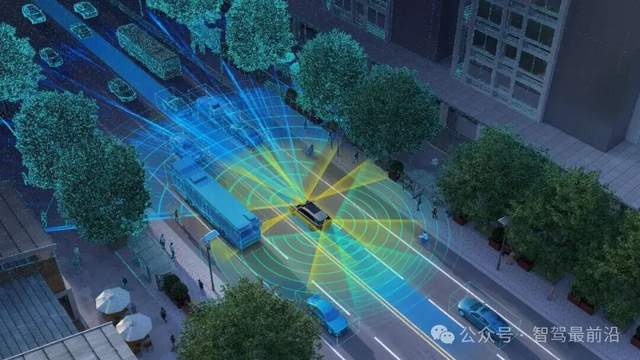
因此,在很多自動駕駛技術(shù)中,更多是采用多傳感器融合,攝像頭提供豐富的視覺信息,激光雷達提供高精度點云,毫米波雷達補充在惡劣天氣和速度測量上的可靠數(shù)據(jù)。融合了不同的傳感器的數(shù)據(jù)后,自動駕駛系統(tǒng)就能在各種天氣條件下都獲得比較全面、準確的環(huán)境理解。
最后的話
激光雷達與毫米波雷達在雨霧天氣下的表現(xiàn)差異,根源在于二者工作波長的不同以及與環(huán)境中水滴的相互作用機制。激光雷達使用的近紅外光波長短,易與微小水滴發(fā)生強烈的散射與吸收,導(dǎo)致信號嚴重衰減和失真,使其在惡劣天氣下的探測距離與點云質(zhì)量顯著下降。相反,毫米波雷達的電磁波波長較長,穿透雨霧時以能量衰減為主,散射效應(yīng)弱,因此仍能獲取有效的回波信號,為系統(tǒng)在低能見度條件下提供可靠的感知支持。
當(dāng)然,自動駕駛系統(tǒng)的傳感器選用不能單靠這一特點來評價,激光雷達在晴好天氣下能構(gòu)建高精度環(huán)境模型,而毫米波雷達則能在雨霧等視線受阻場景中保障基礎(chǔ)感知不中斷。正因如此,通過多傳感器融合,綜合各自優(yōu)勢,自動駕駛系統(tǒng)才能在各種復(fù)雜與動態(tài)環(huán)境中實現(xiàn)穩(wěn)定、安全的運行。
-
激光雷達
+關(guān)注
關(guān)注
981文章
4509瀏覽量
196785 -
自動駕駛
+關(guān)注
關(guān)注
794文章
14930瀏覽量
180657
發(fā)布評論請先 登錄
雨霧天下毫米波雷達與激光雷達誰更具優(yōu)勢?
4D毫米波雷達是如何識別高度信息的?

如何克服毫米波雷達點云稀疏問題?

激光雷達點云中的空洞現(xiàn)象是什么原因?qū)е碌模?/a>
4D毫米波雷達為什么稱為激光雷達的“替身”?
自動駕駛中毫米波雷達到底有何作用?

自動駕駛中4D毫米波雷達在雨霧中更具優(yōu)勢嗎?

智能駕駛的“感官系統(tǒng)”:超聲波雷達、毫米波雷達與激光雷達的協(xié)同之道

微波雷達和毫米波雷達有什么區(qū)別
【干貨】一文帶你讀懂什么是毫米波雷達,了解毫米波雷達如何成為融合感知的關(guān)鍵一環(huán)

自動駕駛中超聲波雷達、激光雷達、毫米波雷達有何區(qū)別?

毫米波雷達在自動駕駛中有何關(guān)鍵作用?
4D毫米波雷達加速上車,加特蘭微、隔空微和華為放出哪些大招?

自動駕駛毫米波雷達之間會相互干擾嗎?

ADAS和防撞系統(tǒng)中的毫米波雷達方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論