 探索 DRV8436E/P 雙 H 橋電機驅動器:特性、應用與設計要點
探索 DRV8436E/P 雙 H 橋電機驅動器:特性、應用與設計要點

探索 DRV8436E/P 雙 H 橋電機驅動器:特性、應用與設計要點
引言
在電機驅動領域,一款性能出色的驅動器對于系統的穩定運行和高效性能至關重要。DRV8436E/P 雙 H 橋電機驅動器憑借其豐富的特性和廣泛的應用場景,成為了眾多工程師的首選。今天,我們就來深入了解一下這款驅動器。
文件下載:drv8436e.pdf
一、DRV8436E/P 的特性亮點
(一)多電機驅動能力
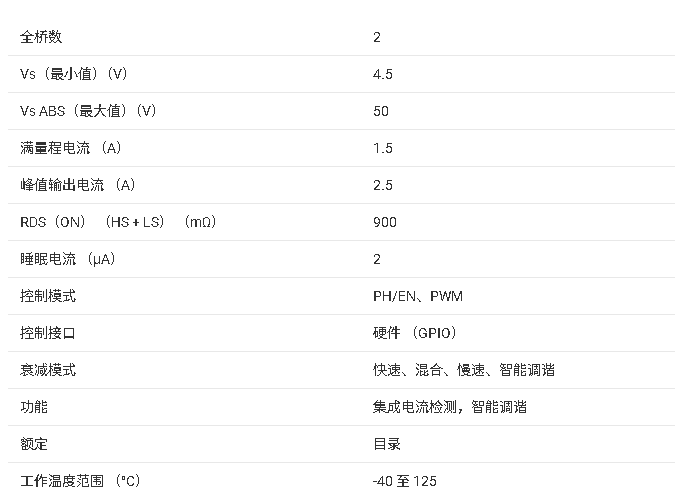
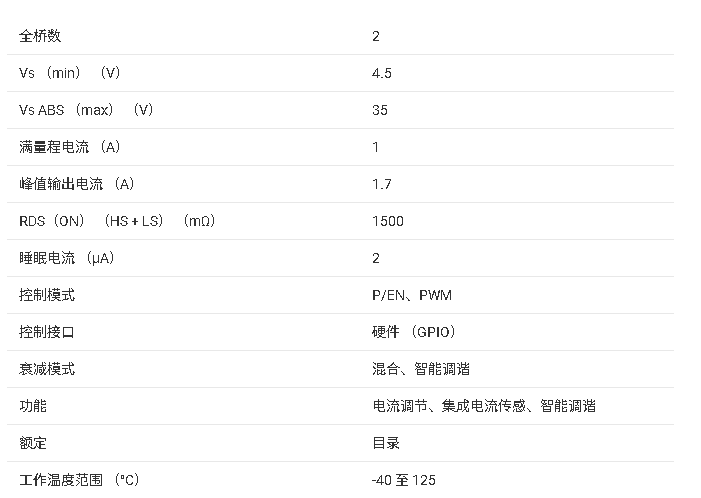
DRV8436E/P 是一款雙 H 橋電機驅動器,它可以驅動一臺雙極步進電機、兩臺雙向有刷直流電機或者四臺單向有刷直流電機,這種多樣化的驅動能力使其在不同的電機控制場景中都能發揮作用。
(二)集成電流感應功能
該驅動器集成了電流感應功能,無需外部檢測電阻,不僅節省了電路板空間,還降低了系統成本。同時,它具有 ±7.5% 的滿量程電流精度,能夠提供較為精確的電流控制。
(三)寬工作電壓范圍
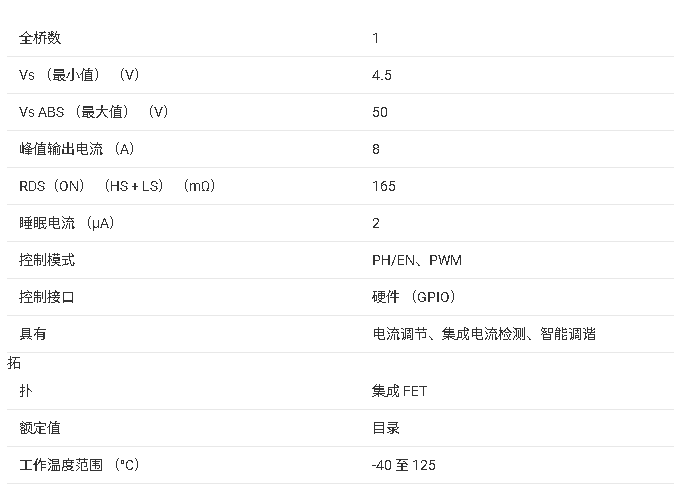
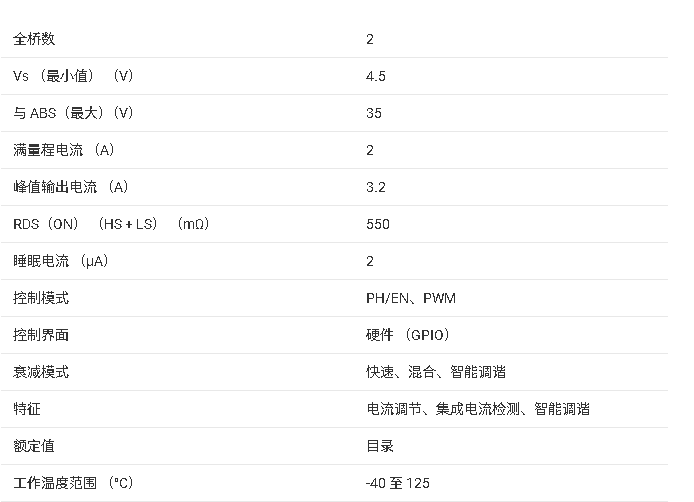
其工作電源電壓范圍為 4.5 - 48V,這使得它可以適應不同的電源環境,為各種應用提供了更大的靈活性。
(四)多種控制接口選項
提供了 PHASE/ENABLE 和 PWM 兩種控制接口選項,方便工程師根據具體的應用需求選擇合適的控制方式,實現與控制器電路的輕松連接。
(五)智能調諧衰減技術
具備智能調諧衰減技術,提供固定慢速、快速和混合衰減等多種衰減模式選項。其中,智能調諧衰減模式可以自動調整衰減設置,在最小化電流紋波的同時快速響應步進變化,大大簡化了步進驅動器在電機驅動系統中的集成。
(六)低導通電阻和高電流容量
在 24V、25°C 的條件下,其導通電阻 (R_{DS(ON)}) 為 900 mΩ(高側 + 低側),每個橋的峰值電流可達 2.4A,滿量程電流為 1.5A,均方根電流為 1.1A,能夠滿足大多數電機的驅動需求。
(七)可配置關斷時間 PWM 斬波
PWM 關斷時間可以配置為 7、16、24 或 32 μs,工程師可以根據實際情況進行調整,優化電機的驅動性能。
(八)低功耗睡眠模式
提供低電流睡眠模式,睡眠電流僅為 2 μA,當系統不需要驅動電機時,可以進入睡眠模式以節省功耗。
(九)低電磁干擾
采用擴頻時鐘技術,有效降低了電磁干擾(EMI),提高了系統的穩定性和可靠性。
(十)保護功能齊全
具備多種保護特性,如 VM 欠壓鎖定(UVLO)、電荷泵欠壓(CPUV)、過流保護(OCP)、熱關斷(OTSD)和故障狀態輸出(nFAULT)等,能夠有效地保護驅動器和電機免受損壞。
二、應用領域廣泛
DRV8436E/P 適用于多種工業應用場景,包括但不限于以下幾個方面:
(一)辦公與家庭自動化
在打印機、掃描儀、ATM 機、貨幣計數器和電子銷售點(EPOS)系統等設備中,DRV8436E/P 可以精確控制電機的運行,實現高效的打印、掃描和交易操作。
(二)工業自動化與機器人
在工廠自動化生產線和機器人系統中,它能夠驅動電機實現精確的運動控制,提高生產效率和機器人的操作精度。
(三)家電產品
無論是大型家電還是小型家電,如智能家電中的電機控制,DRV8436E/P 都可以提供穩定可靠的驅動解決方案。
(四)安防與通信設備
在 IP 網絡攝像機和視頻會議設備中,它可以控制電機實現鏡頭的變焦和旋轉等功能,為用戶提供更好的視覺體驗。
(五)機器人玩具
在真空機器人、人形機器人和玩具機器人中,DRV8436E/P 可以驅動機器人的關節和輪子,實現靈活的運動。
三、詳細技術解析
(一)內部架構與工作原理
DRV8436E/P 集成了兩個 N 溝道功率 MOSFET H 橋、集成電流感應和調節電路。其輸出級由配置為兩個完整 H 橋的 N 溝道功率 MOSFET 組成,還包括電荷泵調節器、電流傳感和調節以及保護電路。通過集成電流感應架構,使用內部電流鏡方法,利用內部功率 MOSFET 進行電流傳感,消除了外部功率檢測電阻的需求,減少了檢測電阻上的功率損耗,降低了外部元件成本、電路板尺寸和系統功耗。
(二)控制接口與橋控制
1. DRV8436E
采用 PH/EN 接口進行控制。通過 nSLEEP、ENx 和 PHx 引腳的不同組合,可以控制 H 橋的狀態,實現電機的正反轉、停止等功能。例如,當 nSLEEP 為高電平,ENx 為高電平,PHx 為低電平時,電機反向轉動;當 PHx 為高電平時,電機正向轉動。
2. DRV8436P
采用 PWM 接口進行控制。通過 nSLEEP、xIN1 和 xIN2 引腳的不同組合,可以控制 H 橋的狀態。例如,當 nSLEEP 為高電平,xIN1 為高電平,xIN2 為低電平時,電機正向轉動;當 xIN1 為低電平,xIN2 為高電平時,電機反向轉動。
(三)電流調節與衰減模式
1. 電流調節
電機繞組中的電流通過可調關斷時間 PWM 電流調節電路進行調節。當 H 橋啟用時,電流以取決于直流電壓、繞組電感和反電動勢大小的速率上升。當電流達到電流調節閾值時,橋進入衰減模式一段時間,以降低電流。關斷時間結束后,橋重新啟用,開始另一個 PWM 周期。PWM 斬波電流由比較器設置,該比較器監視與低端功率 MOSFET 并聯的電流檢測 MOSFET 兩端的電壓。斬波電流 (I{FS}) 可以通過公式 (I{FS}(A)=V{REFx}(V) / K{V}(V / A)=V{REFx}(V) / 2.2(V / A)) 計算,其中 (V{REFx}) 是參考電壓,(K_{V}) 是跨阻增益。
2. 衰減模式
- 慢速衰減:在慢速衰減模式下,H 橋的兩個低端 FET 都導通,允許電流再循環。這種模式下電流紋波最小,但在電流下降時,需要較長時間才能穩定到新的 ITRIP 水平。
- 混合衰減:混合衰減模式開始時為 30% 的 (t_{OFF}) 采用快速衰減,其余時間采用慢速衰減。這種模式的紋波比慢速衰減大,但比快速衰減小,在電流下降時能更快地穩定到新的 ITRIP 水平。
- 快速衰減:快速衰減模式下,H 橋的極性反轉,當電流接近零時,H 橋將關閉以防止電流反向流動。這種模式下電流紋波最大,但在電流下降時過渡時間最快。
- 智能調諧動態衰減:這是一種先進的電流調節控制方法,它可以根據電機繞組電阻和電感、電機老化效應、電機動態速度和負載、電機電源電壓變化以及低電流與高電流的 dI/dt 等操作因素自動調整衰減方案,在慢速、混合和快速衰減之間自動配置衰減模式,動態調整混合衰減中快速衰減的百分比,以實現最低的電流紋波。
(四)保護電路
1. VM 欠壓鎖定(UVLO)
當 VM 引腳電壓低于 UVLO 閾值電壓時,所有輸出將被禁用,nFAULT 引腳將被拉低,電荷泵也將被禁用。當 VM 欠壓條件消除后,正常操作將恢復。
2. VCP 欠壓鎖定(CPUV)
當 VCP 引腳電壓低于 CPUV 電壓時,所有輸出將被禁用,nFAULT 引腳將被拉低,但電荷泵仍保持活動狀態。當 VCP 欠壓條件消除后,正常操作將恢復。
3. 過流保護(OCP)
每個 FET 上的模擬電流限制電路通過移除柵極驅動來限制通過 FET 的電流。如果電流限制持續時間超過 (t{OCP}) 時間,該特定 H 橋中的 FET 將被禁用,nFAULT 引腳將被拉低。當 (t{RETRY}) 時間過去且故障條件消除后,正常操作將自動恢復。
4. 熱關斷(OTSD)
當芯片溫度超過熱關斷限制((T{OTSD}))時,H 橋中的所有 MOSFET 都將被禁用,nFAULT 引腳將被拉低。當結溫降至過溫閾值限制減去滯后((T{OTSD}-T_{HYS_OTSD}))以下時,正常操作將恢復。
四、應用設計要點
(一)電源設計
DRV8436E/P 設計用于在 4.5 - 48V 的輸入電壓范圍內工作。在每個 VM 引腳附近應盡可能靠近設備放置一個額定電壓為 VM 的 0.01 - μF 陶瓷電容,以減少電壓波動。此外,還需要在 VM 上添加一個大容量電容,以提供足夠的能量存儲。大容量電容的選擇需要考慮電機系統所需的最大電流、電源的電容和電流供應能力、電源與電機系統之間的寄生電感、可接受的電壓紋波、電機類型和電機制動方法等因素。一般來說,大容量電容的電壓額定值應高于工作電壓,以提供一定的余量。
(二)布局設計
1. 旁路電容
VM 引腳應使用額定電壓為 VM 的低 ESR 陶瓷旁路電容(推薦值為 0.01 μF)旁路到 GND,該電容應盡可能靠近 VM 引腳,并使用粗走線或接地平面連接到設備的 GND 引腳。此外,DVDD 引腳也應使用低 ESR 陶瓷電容(推薦值為 0.47 μF,額定電壓為 6.3V)旁路到地。
2. 電荷泵電容
CPL 和 CPH 引腳之間應放置一個額定電壓為 VM 的 0.022 μF 低 ESR 陶瓷電容,VM 和 VCP 引腳之間應放置一個額定電壓為 16V 的 0.22 μF 低 ESR 陶瓷電容,且這些電容應盡可能靠近引腳放置。
3. 熱焊盤
熱焊盤必須連接到系統地,以幫助散熱,提高器件的可靠性。
(三)外部組件選擇
根據數據手冊的推薦,選擇合適的外部組件,如與 VREF 引腳連接的電阻分壓器,以設置斬波電流;nFAULT 引腳應通過一個大于 4.7 - kΩ 的電阻上拉到 5V 或 3.3V 電源;為電荷泵和線性電壓調節器選擇合適的電容等。
五、總結
DRV8436E/P 雙 H 橋電機驅動器以其豐富的特性、廣泛的應用場景和完善的保護功能,為電機驅動系統提供了一個可靠的解決方案。在設計過程中,工程師需要根據具體的應用需求,合理選擇控制接口、衰減模式和外部組件,同時注意電源設計和布局設計,以充分發揮該驅動器的性能優勢。你在使用電機驅動器時遇到過哪些問題呢?歡迎在評論區分享你的經驗和見解。
-
電機驅動器
+關注
關注
16文章
869瀏覽量
66592 -
應用設計
+關注
關注
0文章
349瀏覽量
8655
發布評論請先 登錄



 工商網監
工商網監
評論