") 深入解析DRV8424E/P與DRV8425E/P:雙H橋電機(jī)驅(qū)動(dòng)的理想之選
深入解析DRV8424E/P與DRV8425E/P:雙H橋電機(jī)驅(qū)動(dòng)的理想之選

深入解析DRV8424E/P與DRV8425E/P:雙H橋電機(jī)驅(qū)動(dòng)的理想之選
在工業(yè)應(yīng)用的電機(jī)驅(qū)動(dòng)領(lǐng)域,雙H橋電機(jī)驅(qū)動(dòng)器一直是實(shí)現(xiàn)高效、精確控制的關(guān)鍵組件。今天,我們就來深入剖析德州儀器(TI)推出的DRV8424E/P和DRV8425E/P這兩款雙H橋電機(jī)驅(qū)動(dòng)器,探討它們的特性、應(yīng)用以及設(shè)計(jì)要點(diǎn)。
文件下載:drv8425e.pdf
一、產(chǎn)品概述
DRV8424E/P和DRV8425E/P是為多種工業(yè)應(yīng)用量身定制的雙H橋電機(jī)驅(qū)動(dòng)器。它們既可以驅(qū)動(dòng)兩個(gè)直流電機(jī),也能驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī),具有廣泛的適用性。這兩款驅(qū)動(dòng)器采用了集成電流感測和調(diào)節(jié)電路,無需外部功率感測電阻,大大節(jié)省了電路板空間和成本。同時(shí),它們還具備多種保護(hù)功能,能有效提高系統(tǒng)的可靠性。
二、產(chǎn)品特性
2.1 驅(qū)動(dòng)能力多樣
- 電機(jī)類型適配廣泛:支持一個(gè)雙極步進(jìn)電機(jī)、兩個(gè)雙向有刷直流電機(jī)或四個(gè)單向有刷直流電機(jī)的驅(qū)動(dòng),滿足不同應(yīng)用場景的需求。
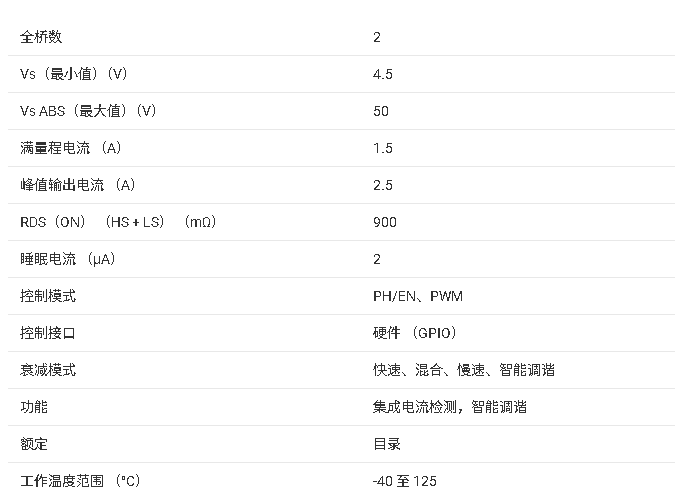
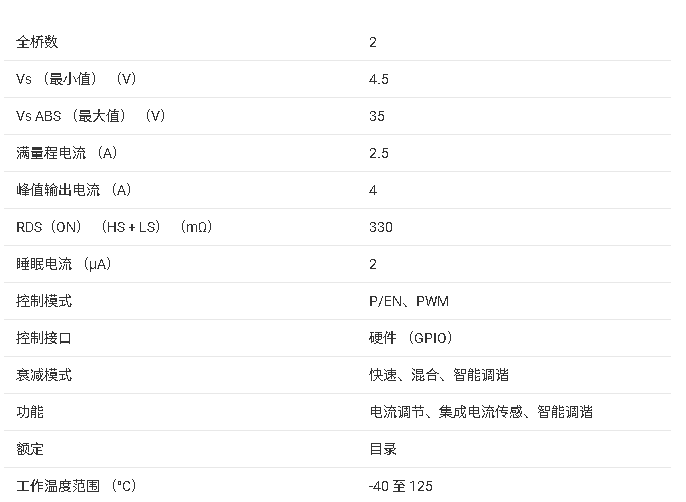
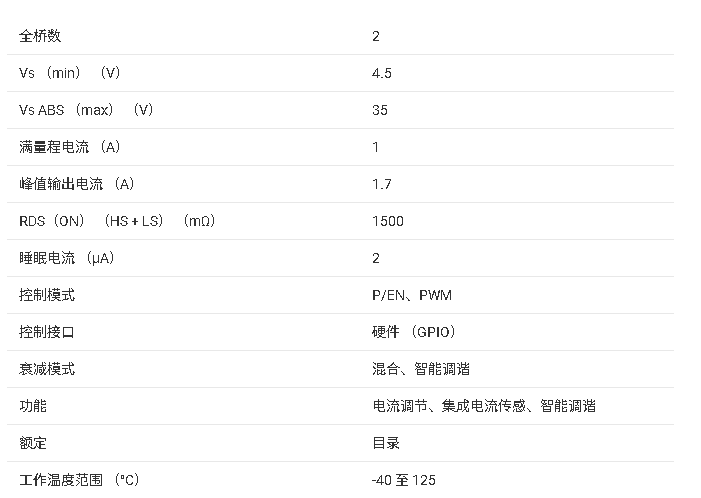
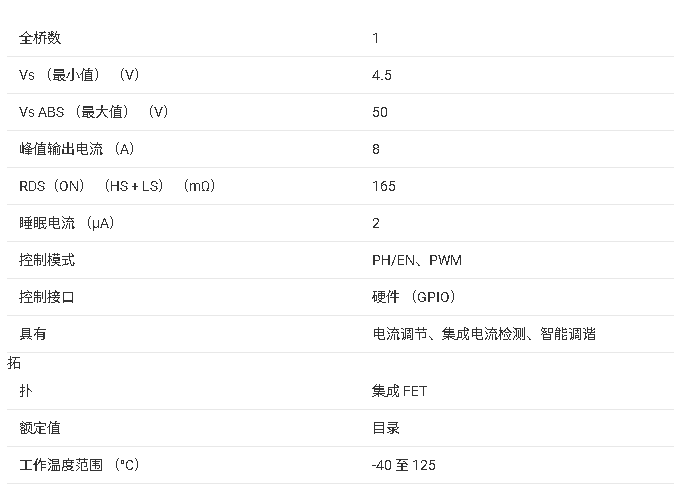
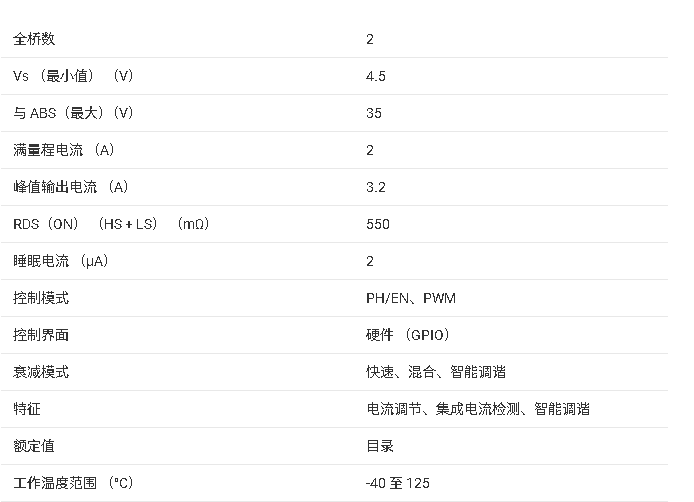
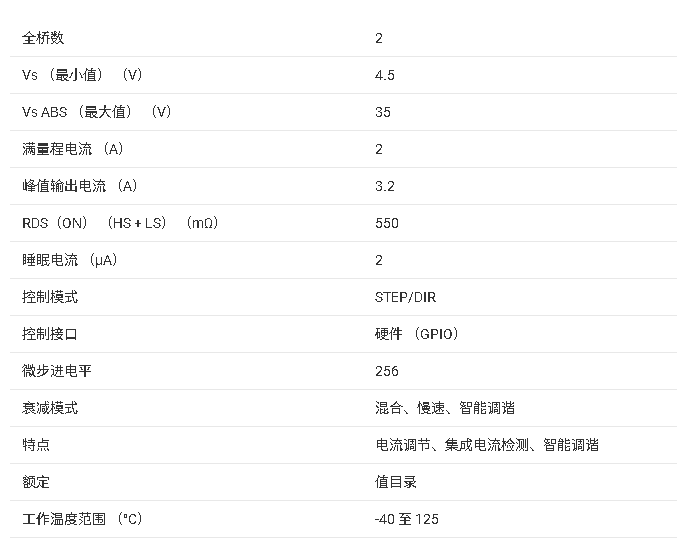
- 高電流輸出:DRV8424E/P能夠提供高達(dá)4A的峰值電流(有刷電機(jī))或2.5A的滿量程電流(步進(jìn)電機(jī));DRV8425E/P則可提供3.2A的峰值電流(有刷電機(jī))或2A的滿量程電流(步進(jìn)電機(jī))。不過,實(shí)際的滿量程和均方根電流會(huì)受到環(huán)境溫度、電源電壓和PCB散熱能力的影響。
2.2 集成電流感測功能
- 無需外部感測電阻:采用集成電流感測架構(gòu),通過電流鏡方法和內(nèi)部功率MOSFET進(jìn)行電流感測,消除了感測電阻的功率損耗,節(jié)省了電路板空間和成本。
- 高精度電流控制:滿量程電流精度可達(dá)±5%,能實(shí)現(xiàn)精確的電流調(diào)節(jié)。
2.3 寬工作電壓范圍
支持4.5V至33V的工作電源電壓范圍,適應(yīng)不同的電源系統(tǒng)。
2.4 多種控制接口選項(xiàng)
提供PHASE/ENABLE(PH/EN)和PWM(IN/IN)兩種控制接口,方便與控制器電路進(jìn)行連接。
2.5 可配置的電流調(diào)節(jié)
- 多種衰減模式:支持智能調(diào)諧動(dòng)態(tài)衰減、智能調(diào)諧紋波控制、混合衰減和快速衰減等多種衰減模式,可根據(jù)不同的應(yīng)用需求進(jìn)行選擇。
- 可調(diào)節(jié)的PWM關(guān)斷時(shí)間:PWM關(guān)斷時(shí)間tOFF可調(diào)整為7、16、24或32μs,進(jìn)一步優(yōu)化電流調(diào)節(jié)。
2.6 低功耗睡眠模式
當(dāng)不驅(qū)動(dòng)電機(jī)時(shí),可進(jìn)入低功耗睡眠模式,此時(shí)電流僅為2μA,能夠有效節(jié)省系統(tǒng)功耗。
2.7 低電磁干擾(EMI)
采用擴(kuò)頻時(shí)鐘技術(shù),降低了電磁干擾,提高了系統(tǒng)的電磁兼容性。
2.8 完善的保護(hù)功能
包括VM欠壓鎖定(UVLO)、電荷泵欠壓(CPUV)、過流保護(hù)(OCP)、熱關(guān)斷(OTSD)等保護(hù)功能,確保設(shè)備在異常情況下的安全運(yùn)行。同時(shí),還提供故障狀態(tài)輸出(nFAULT),方便及時(shí)發(fā)現(xiàn)和處理故障。
三、產(chǎn)品應(yīng)用
DRV8424E/P和DRV8425E/P廣泛應(yīng)用于多個(gè)領(lǐng)域,如打印機(jī)和掃描儀、ATM機(jī)和紡織機(jī)械、辦公和家庭自動(dòng)化、工廠自動(dòng)化和機(jī)器人、主要家用電器以及真空、人形和玩具機(jī)器人等。
四、詳細(xì)設(shè)計(jì)與實(shí)現(xiàn)
4.1 典型應(yīng)用:驅(qū)動(dòng)有刷直流電機(jī)
- 設(shè)計(jì)要求:以驅(qū)動(dòng)兩個(gè)有刷直流電機(jī)為例,設(shè)計(jì)輸入?yún)?shù)包括電源電壓VM(如24V)、電機(jī)繞組電阻RL(如1.2Ω)、電機(jī)繞組電感LL(如2.3mH)、開關(guān)頻率fPWM(如30kHz)和每個(gè)電機(jī)的調(diào)節(jié)電流IREG(如1.5A)。
- 電流調(diào)節(jié):調(diào)節(jié)電流IREG由VREFx模擬電壓設(shè)定,計(jì)算公式為(I{REG}(A)=V{REFx}(V) / K{V}(V / A)=V{REFx}(V) / 1.32(V/A))。在啟動(dòng)有刷直流電機(jī)時(shí),電流調(diào)節(jié)可限制涌流,防止啟動(dòng)時(shí)的高電流。
- 功率損耗和熱計(jì)算:總功率損耗(P{TOT})由功率MOSFET的導(dǎo)通損耗(P{COND})、開關(guān)損耗(P{SW})和靜態(tài)電源電流損耗(P{Q})組成,即(P{TOT}=P{COND}+P{SW}+P{Q})。其中,(P{COND})可根據(jù)設(shè)備的(R{DS(ON)})和調(diào)節(jié)輸出電流IREG計(jì)算;(P{SW})與電源電壓、調(diào)節(jié)輸出電流、開關(guān)頻率以及設(shè)備的輸出上升和下降時(shí)間有關(guān);(P{Q})則由電源電壓和VM靜態(tài)電流決定。在計(jì)算時(shí),需要注意(R{DS(ON)})與設(shè)備溫度密切相關(guān),可參考典型特性曲線中的歸一化(R{DS(ON)})與溫度曲線。同時(shí),要確保設(shè)備的結(jié)溫在規(guī)定的工作范圍內(nèi)。
4.2 替代應(yīng)用:驅(qū)動(dòng)步進(jìn)電機(jī)
- 設(shè)計(jì)要求:以驅(qū)動(dòng)步進(jìn)電機(jī)為例,設(shè)計(jì)輸入?yún)?shù)包括電源電壓VM(如24V)、電機(jī)繞組電阻RL(如0.93Ω/相)、電機(jī)繞組電感LL(如1.9mH/相)、電機(jī)全步角θstep(如1.8°/步)、目標(biāo)微步進(jìn)級(jí)別nm(如1/2步)、目標(biāo)電機(jī)速度v(如90rpm)和目標(biāo)滿量程電流IFS(如2A)。
- 電流調(diào)節(jié):步進(jìn)電機(jī)的滿量程電流IFS取決于VREFx電壓,計(jì)算公式為(I{FS}(A)=V{REF}(V) / 1.32(V / A))。同時(shí),IFS電流還需滿足(I{FS}
- 步進(jìn)電機(jī)速度:為了實(shí)現(xiàn)正確的速度控制,需要確定輸入波形的頻率。頻率(f{step})可根據(jù)目標(biāo)電機(jī)速度v、微步進(jìn)級(jí)別nm和電機(jī)全步角θstep計(jì)算得出,公式為(f{step}( steps / s)=frac{v(rpm) × 360(° / rot)}{theta{step}(° / step ) × n{m}( steps / microstep ) × 60( s / min)})。
- 衰減模式:設(shè)備支持快速衰減、混合衰減和智能調(diào)諧等多種衰減模式。通過可調(diào)的固定關(guān)斷時(shí)間方案,在電機(jī)繞組電流達(dá)到斬波閾值后,設(shè)備會(huì)將繞組置于其中一種衰減模式下,持續(xù)時(shí)間為TOFF,之后開始新的驅(qū)動(dòng)階段。
五、布局與設(shè)計(jì)建議
5.1 布局指南
- 電源引腳旁路:VM引腳應(yīng)使用低ESR陶瓷旁路電容(推薦值為0.01μF,額定電壓為VM)旁路到PGND,電容應(yīng)盡量靠近VM引腳,并通過粗走線或接地平面連接到設(shè)備的PGND引腳。同時(shí),VM引腳還需使用額定電壓為VM的大容量電容旁路到地,可選用電解電容。
- 電荷泵電容:CPL和CPH引腳之間應(yīng)放置一個(gè)低ESR陶瓷電容,推薦值為0.022μF,額定電壓為VM;VM和VCP引腳之間應(yīng)放置一個(gè)低ESR陶瓷電容,推薦值為0.22μF,額定電壓為16V。這兩個(gè)電容都應(yīng)盡量靠近相應(yīng)的引腳。
- 邏輯電源引腳旁路:DVDD引腳應(yīng)使用低ESR陶瓷電容旁路到地,推薦值為0.47μF,額定電壓為6.3V,同樣要盡量靠近引腳。
- 散熱PAD連接:散熱PAD必須連接到系統(tǒng)地,以確保良好的散熱性能。
5.2 布局示例
文檔中提供了HTSSOP和VQFN兩種封裝的布局建議示例,可作為實(shí)際設(shè)計(jì)的參考。
六、總結(jié)
DRV8424E/P和DRV8425E/P雙H橋電機(jī)驅(qū)動(dòng)器憑借其豐富的特性、廣泛的應(yīng)用場景和完善的保護(hù)功能,為工業(yè)應(yīng)用中的電機(jī)驅(qū)動(dòng)提供了可靠的解決方案。在設(shè)計(jì)過程中,工程師需要根據(jù)具體的應(yīng)用需求,合理選擇控制接口、衰減模式和相關(guān)參數(shù),并注意布局和散熱設(shè)計(jì),以充分發(fā)揮這兩款驅(qū)動(dòng)器的性能優(yōu)勢。希望本文能為電子工程師在電機(jī)驅(qū)動(dòng)設(shè)計(jì)方面提供有益的參考。你在實(shí)際應(yīng)用中是否遇到過類似電機(jī)驅(qū)動(dòng)器的設(shè)計(jì)挑戰(zhàn)呢?歡迎在評(píng)論區(qū)分享你的經(jīng)驗(yàn)和想法。
發(fā)布評(píng)論請(qǐng)先 登錄
DRV8881:工業(yè)電機(jī)驅(qū)動(dòng)的理想之選
探索 DRV8436E/P 雙 H 橋電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
DRV8426E/P:多功能電機(jī)驅(qū)動(dòng)芯片的詳細(xì)剖析
DRV8424E/P、DRV8425E/P雙H橋電機(jī)驅(qū)動(dòng)器技術(shù)解析
DRV8434E/P雙H橋電機(jī)驅(qū)動(dòng)器:高性能驅(qū)動(dòng)方案解析
DRV8428E/P:高性能雙H橋電機(jī)驅(qū)動(dòng)的卓越之選
DRV8256E/P:高性能H橋電機(jī)驅(qū)動(dòng)芯片的深度解析
深入剖析DRV8424/25步進(jìn)電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)指南
DRV8212P:高性能H橋電機(jī)驅(qū)動(dòng)器的深度解析
?DRV8436E/P 雙H橋電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8424E/DRV8425E 雙H橋電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8428E/P 雙H橋電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8256E/P H橋電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
DRV8425E雙H橋電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
DRV8424/DRV8425 步進(jìn)電機(jī)驅(qū)動(dòng)器總結(jié)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論