 直播預告 | 挑戰高精度:基于睿擎EtherCAT主站實現雙電機同軸同步
直播預告 | 挑戰高精度:基于睿擎EtherCAT主站實現雙電機同軸同步

在精密裝配、高動態物料傳送等工業場景中,您是否曾面臨這樣的挑戰:
兩個需要嚴格同步的軸,因獨立控制產生的微小相位差,導致產品錯位或機械振動?
期望一種更直接、可靠的方式,來實現如“鏡像”般精準的協同運動?
如果這是您正在解決的問題,那么1月7日(周三)晚8點的這場直播,將是您不可錯過的技術實戰。
▎ 直播信息
主題:EtherCAT雙電機同軸同步控制
時間:2026年1月7日(周三)20:00
主講人:睿擎平臺資深工程師
預約方式:

▎ 直播主題:EtherCAT雙電機同軸同步控制
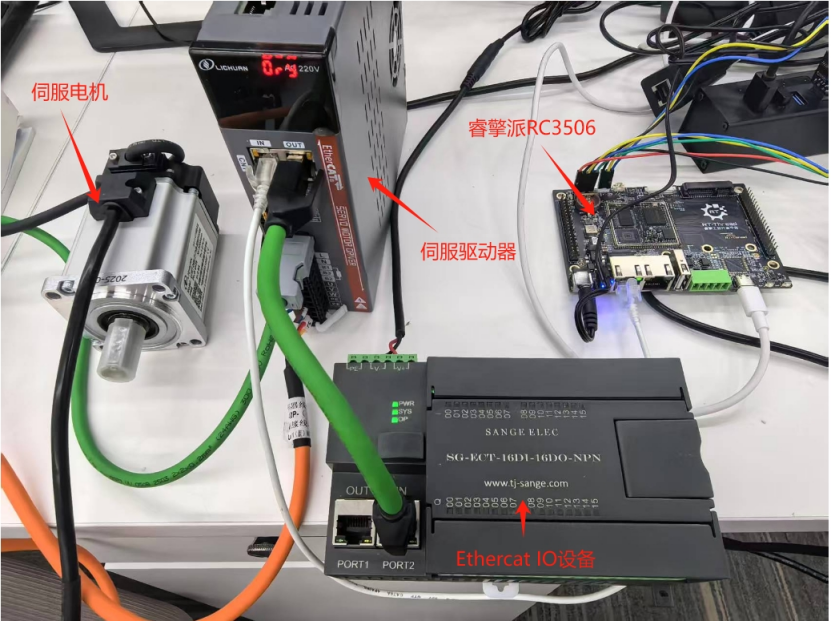
我們將首次在線演示一個極具代表性的高階應用場景:基于睿擎EtherCAT主站,讓兩個通過聯軸器物理對接的伺服電機,實現精準的反向同步運轉。
您將看到一個直觀的“機械芭蕾”——兩臺電機在指令下毫秒間實現速度同步、方向相反,并在運行中實時響應速度調節指令。這不僅是性能演示,更是工業級多軸協同控制的核心能力驗證。
▎ 技術亮點:為何這值得關注?
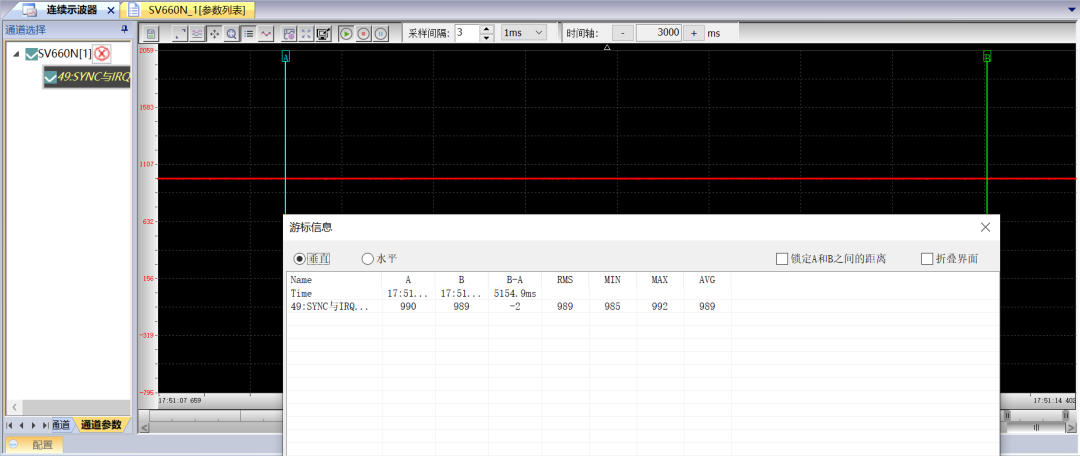
1.毫秒級同步精度:依托EtherCAT分布式時鐘(DC)和硬實時內核,確保控制指令的精準下發與執行,消除累積誤差。
2.動態實時調控:直播中將演示不停止運動,在線實時修改速度指令,并一鍵切換運轉方向,展現控制系統的靈活性與高響應性。
3.全閉環控制實踐:從上層位置指令,深入伺服內部的位置環、速度環、轉矩環(三環)控制邏輯,解析高精度同步的底層原理。
▎ 核心知識點:您將系統掌握
●同步控制算法核心:深入講解雙電機位置同步算法,以及在實際硬件(如“一拖二”驅動器)上的應用與配置。
●多軸協同架構:剖析雙伺服驅動器協同控制的系統架構與通信調度。
●從理論到信號的完整鏈路:理解從基于位置模式的精準控制指令,到最終電機響應的完整數據流與控制閉環。
▎ 適合誰觀看?
●正在評估或使用EtherCAT進行多軸同步項目的技術負責人。
●希望深入理解伺服三環控制與多軸協同算法的技術研究者。
●任何希望提升工業運動控制系統設計能力的朋友。
這不僅僅是一場演示,更是一次對系統控制精度、實時性和穩定性的深度剖析。如果您希望將設備的多軸同步性能提升至新的水平,1月7日周三晚8點,直播間為您揭示關鍵實現路徑。
-
電機
+關注
關注
143文章
9650瀏覽量
154468 -
ethercat
+關注
關注
20文章
1527瀏覽量
45637
發布評論請先 登錄
直播預告 | 睿擎派3506 Ubuntu開發實戰:從環境搭建到整包固件制作,一次講透

睿擎3562 EtherCAT主站實踐

直播預告 | 睿擎平臺AMP混合部署:你的Qt界面如何“指揮”底層電機?
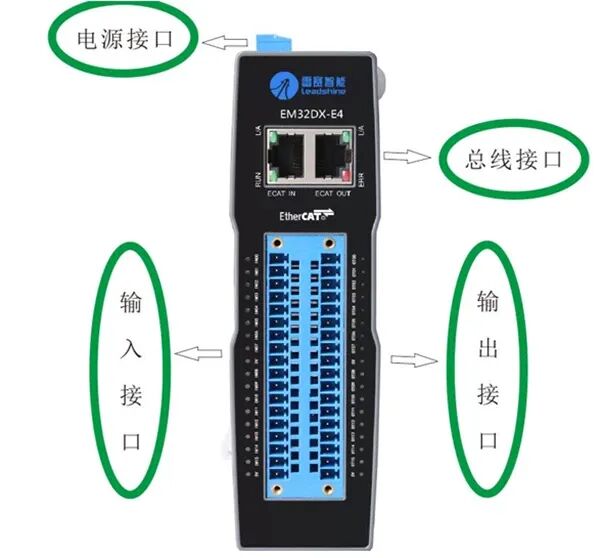
【睿擎派】EtherCAT總線之IO模塊讀寫
深度解析 | 低抖動高精度EtherCAT多軸控制的實現與實踐案例
【直播預告】下周三晚8點|睿擎物聯網實戰:從傳感器采集到MQTT上云全流程解析

【直播預告】下周三晚8點|睿擎文件系統實戰:從開發到發布全流程解析
【直播預告】10月29日 周三 晚8點 |睿擎網絡開發實戰:從配置到應用,掌握工業級網絡開發精髓!| 直播預告
【直播預告】周三晚8點|睿擎網絡開發實戰:從配置到應用,掌握工業級網絡開發精髓!| 直播預告
睿擎EtherCAT多軸控制技術:如何實現低抖動高精度運動控制 | 深度解析
【直播預告】10月14日 本周二晚8點|睿擎平臺首場實戰直播:從快速上手到實現遠程監控網關

【直播預告】10月14日晚8點|睿擎平臺首場實戰直播:從快速上手到實現遠程監控網關
如何實現EtherCAT與電機控制之間的同步處理

多色印刷機的高精度同步控制:EtherCAT與EtherNet/IP的集成應用
基于睿擎派輕松玩轉EtherCAT主站,實現電機精確控制



 工商網監
工商網監
評論