 睿擎3562 EtherCAT主站實踐
睿擎3562 EtherCAT主站實踐

1引言
在工業自動化領域,EtherCAT(Ethernetfor Control AutomationTechnology)已經成為最具影響力的實時工業以太網技術之一。它以其超高的通信效率、靈活的拓撲結構和低廉的成本優勢,廣泛應用于工業機器人、CNC機床、自動化產線等場景。
睿擎派3562作為一款基于瑞芯微RK3562處理器的高性能開發板,內置了EtherCAT主站功能,配合AMP混合部署模式,可以實現高性能的工業控制應用。本文將帶您深入了解睿擎派3562的EtherCAT主站功能,掌握從硬件連接到軟件配置的全流程。
2EtherCAT技術簡介
EtherCAT是一種基于以太網的實時工業現場總線技術,具有以下特點:
●高速通信:采用“processingon thefly”技術,數據在傳輸過程中被從站設備直接處理,延遲極低
●靈活拓撲:支持線性、樹形、環形等多種拓撲結構,最大可連接65535個從站
●成本優勢:使用標準以太網硬件,無需專用網卡

3睿擎派3562EtherCAT主站特性
睿擎派3562開發板內置了完整的EtherCAT主站功能,支持多種運行模式:
●CSP(周期同步位置模式):適用于需要精確位置控制的場景,如工業機器人
●CSV(周期同步速度模式):適用于速度控制場景
●CST(周期同步力矩模式):適用于力矩控制場景


3.1核心技術參數
睿擎派3562的EtherCAT主站具有以下技術特點:
●通信周期:主循環支持250us,滿足高精度控制需求
●分布式時鐘:支持DC同步,實現微秒級同步精度
●多從站支持:可同時連接和控制多個EtherCAT從站設備
●CIa402協議:支持標準伺服電機控制協議,兼容主流伺服驅動器
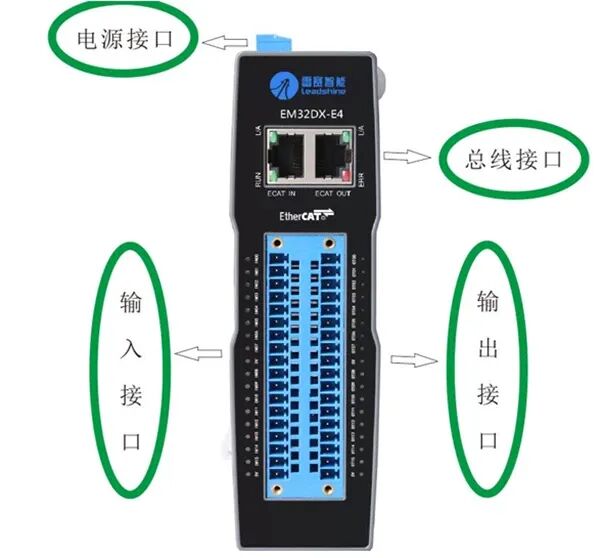
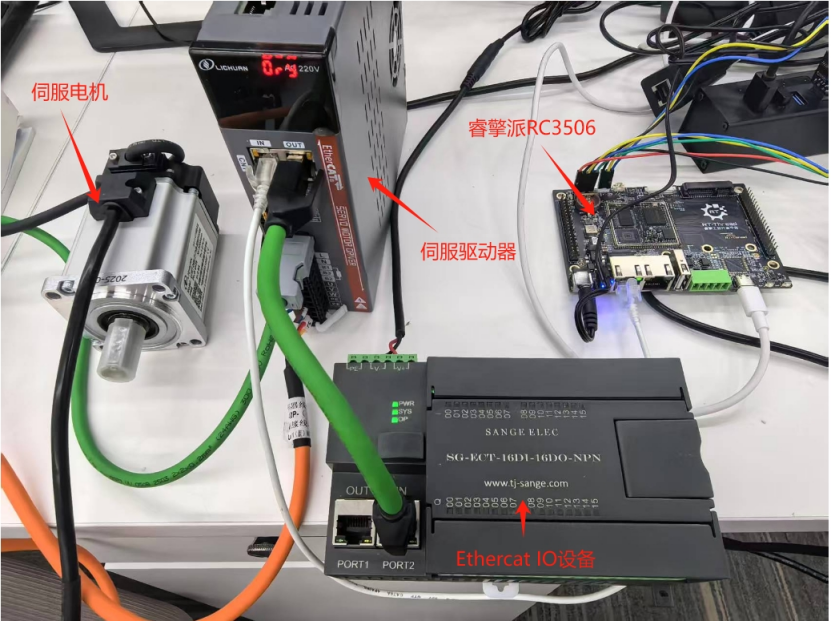
4硬件連接
EtherCAT通信需要使用網線將睿擎派3562與EtherCAT從站設備(如伺服驅動器、IO模塊等)連接。
典型的連接拓撲如下:
1.將睿擎派3562的網口通過網線連接到第一個EtherCAT從站的EtherCATIN接口
2.從第一個從站的EtherCATOUT接口連接到下一個從站的EtherCATIN接口
3.依此類推,形成鏈式拓撲結構

5軟件配置與實現
5.11.創建工程
在RuiChingStudio中創建新的工程,選擇EtherCAT主站CSP示例模板。實際工程結構如下:

5.22.主站初始化配置
工程中使用的EtherCAT主站配置參數如下:

5.33.PDO映射配置
CSP模式使用的PDO映射包括控制字、目標位置、目標速度、目標力矩等參數:

5.44.CSP模式控制實現
實際工程中實現了完整的CSP位置控制,包括伺服使能、模式切換和位置控制:


5.55.位置控制命令
工程提供了MSH命令行接口,方便調試和控制:
命令 | 功能 |
ect_csp | 啟動EtherCAT主站,進入CSP模式 |
motor_run | 啟動電機運行 |
motor_stop | 停止電機 |
motor_dir 0/1 | 設置電機旋轉方向(0-反向,1-正向) |

6典型應用場景
6.11.工業機器人
EtherCAT的高精度同步特性使其非常適合多軸工業機器人控制。睿擎派3562可以同時控制多個伺服電機,實現精確的位置和速度控制。
6.22.CNC數控機床
在CNC機床應用中,EtherCAT可以確保多軸運動的嚴格同步,保證加工精度。
6.33.自動化產線
EtherCAT的靈活拓撲和高速通信特性,使其成為自動化產線的理想選擇,可以連接大量的IO模塊和執行器。

7常見問題與解決方案
7.11.從站無法識別
●問題:EtherCAT從站設備無法被主站識別
●解決方案:
undefined檢查網線連接是否正確
undefined確認從站設備的EtherCATIN/OUT接口方向
undefined檢查從站設備的EtherCAT配置是否正確
7.22.通信不穩定
●問題:EtherCAT通信出現丟幀或延遲
●解決方案:
undefined檢查網線質量,建議使用工業級網線
undefined確保電源供應穩定
undefined減少從站數量或降低通信周期
7.33.同步精度不足
●問題:多軸同步精度達不到要求
●解決方案:
undefined啟用分布式時鐘(DC)同步功能
undefined優化控制周期參數
undefined檢查從站設備的同步能力
8總結
睿擎派3562內置的EtherCAT主站功能為工業自動化應用提供了強大的支持。配合AMP混合部署模式(Ubuntu+RT-Thread),可以在Linux系統上運行復雜的控制算法,同時利用RT-Thread的實時性保證控制指令的精確執行。
無論是工業機器人、CNC機床還是自動化產線,睿擎派3562都能提供穩定可靠的EtherCAT通信解決方案。如果您正在尋找一款支持EtherCAT的國產開發板,睿擎派3562絕對值得考慮。
-
工業自動化
+關注
關注
17文章
3147瀏覽量
69924 -
主站
+關注
關注
0文章
53瀏覽量
8182 -
ethercat
+關注
關注
19文章
1520瀏覽量
45330
發布評論請先 登錄
【睿擎派】EtherCAT總線之IO模塊讀寫
睿擎派3562快速上手體驗

基于全志T507-H的Igh EtherCAT主站案例分享
【米爾NXP i.MX 91開發板評測】移植運行IGH EtherCAT主站
深度解析 | 低抖動高精度EtherCAT多軸控制的實現與實踐案例
基于賽靈思FPGA的EtherCAT主站運動控制
找開發EtherCat主站的設計人員
開源!ZYNQ IgH EtherCAT主站方案分享
EtherCAT主站方案之橫向比較

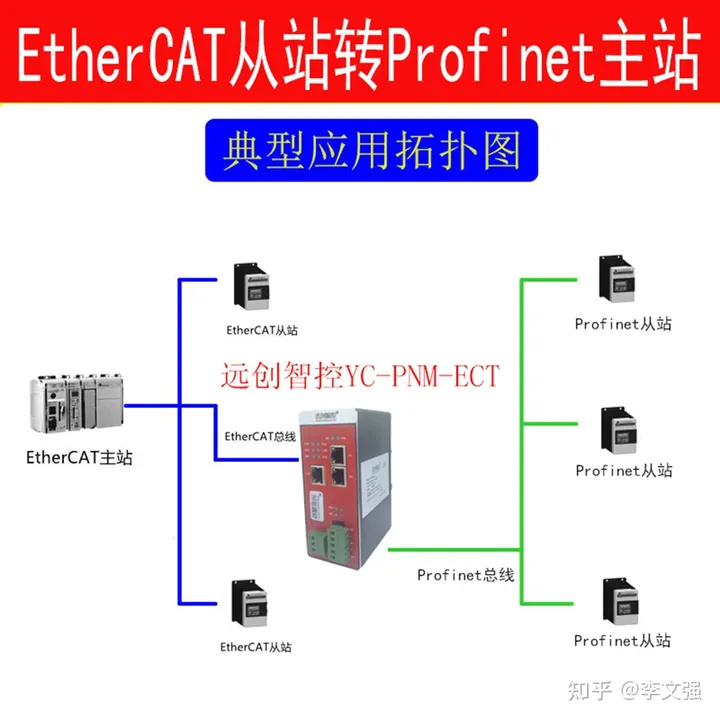
通過Profinet主站轉EtherCAT協議網關把profient從站設備接入到EtherCAT主站設備中
基于睿擎派輕松玩轉EtherCAT主站,實現電機精確控制
睿擎平臺v1.7.2版本正式發布|技術集結




 工商網監
工商網監
評論