") 如何實(shí)現(xiàn)EtherCAT與電機(jī)控制之間的同步處理
如何實(shí)現(xiàn)EtherCAT與電機(jī)控制之間的同步處理

EtherCAT與電機(jī)控制之間的同步處理
上篇提到利用EtherCAT產(chǎn)生的sync信號(hào),同步所有從站節(jié)點(diǎn)系統(tǒng),完成在同一時(shí)刻的電機(jī)指令更新。那么,今天跟大家介紹的是如何利用sync信號(hào)去同步電機(jī)控制系統(tǒng)。
該參考設(shè)計(jì)為單芯片雙電機(jī)控制,因此首先需要向大家介紹的是如何將兩個(gè)電機(jī)系統(tǒng)進(jìn)行同步,電機(jī)如何與采樣進(jìn)行同步。
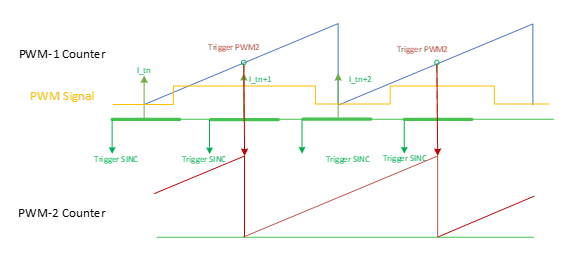
上圖為兩個(gè)電機(jī)的PWM計(jì)數(shù)器與采樣觸發(fā)示意圖。
PWM-1&2 Counter分別對(duì)應(yīng)電機(jī)1和電機(jī)2的PWM計(jì)數(shù)器。i.MX RT1180每個(gè)PWM可以輸出多路Trigger,用于同步其他模塊,這里我們利用PWM-1周期的中間時(shí)刻產(chǎn)生一個(gè)Trigger,通過XBAR連接至PWM-2計(jì)數(shù)器的外部同步信號(hào),同步PWM-1和PWM-2計(jì)數(shù)器。
當(dāng)圖中的紅色Trigger產(chǎn)生后,PWM-2計(jì)數(shù)器即被初始化,如此便可以完成兩個(gè)電機(jī)之間的計(jì)數(shù)器同步。之所以兩個(gè)PWM計(jì)數(shù)器錯(cuò)相位180度,1.能夠在時(shí)間上平攤CPU負(fù)載;2.對(duì)應(yīng)有效電壓矢量也會(huì)錯(cuò)相,瞬時(shí)電壓負(fù)載不會(huì)過大;3.該應(yīng)用單個(gè)節(jié)點(diǎn)上的兩個(gè)電機(jī)并不是相同的用途,其中一個(gè)電機(jī)用于齒輪對(duì)接,另一個(gè)用于控制滑臺(tái)絲桿,因此兩個(gè)PWM不必同步,只需要所有從站同一功能的PWM計(jì)數(shù)器同步。
電機(jī)控制中,電流的采樣同樣需要和PWM同步。該參考設(shè)計(jì)中,利用的是基于sigma-delta ADC的相電阻采樣,為了保證能夠采樣得到對(duì)應(yīng)的相電流基波,需要在電壓矢量0或者電壓矢量1的中心時(shí)刻進(jìn)行采樣。以電機(jī)1為例,PWM-1在電壓矢量0中心時(shí)刻的前OSR*ORD/Fsinc時(shí)刻產(chǎn)生PWM Trigger,觸發(fā)sinc filter進(jìn)行轉(zhuǎn)換,其中OSR為sinc filter抽樣率,ORD為sinc filter階數(shù),F(xiàn)sinc為sinc filter調(diào)制時(shí)鐘。整個(gè)轉(zhuǎn)換時(shí)間為:2*OSR*ORD/Fsinc,采樣得到的電流即為0電壓矢量中心時(shí)刻的電流。
可以看到兩者的同步,都是利用了PWM的Trigger功能,在設(shè)定時(shí)刻產(chǎn)生,并通過XBAR路由到其他外設(shè),這里是PWM和sinc filter外設(shè),進(jìn)行相關(guān)事件的觸發(fā),整個(gè)同步流程操作十分簡(jiǎn)單,利于用戶開發(fā)。
最后,便是如何將EtherCAT的sync信號(hào)去同步整個(gè)電機(jī)控制系統(tǒng),由上文可知,兩個(gè)電機(jī)與對(duì)應(yīng)的采樣都已經(jīng)完成了同步,那么我們只需要將EtherCAT產(chǎn)生的sync信號(hào)與電機(jī)1的PWM計(jì)數(shù)器同步即可。
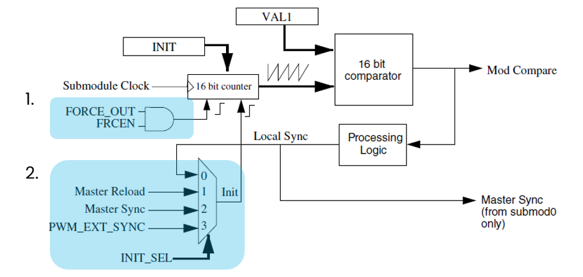
如上圖所示為PWM模塊的同步邏輯框圖,可以看到該計(jì)數(shù)器有兩個(gè)同步初始化源,在圖中已經(jīng)標(biāo)識(shí)。常規(guī)使用中,一般只需要第二個(gè)初始化信號(hào)對(duì)PWM計(jì)數(shù)器進(jìn)行初始化,以確保PWM輸出的周期。除了PWM自身的載波周期外,我們還需要利用EtherCAT的sync信號(hào)去對(duì)PWM計(jì)數(shù)器進(jìn)行同步初始化,這里我們只需要通過XBAR將sync信號(hào)路由至FORCE_OUT信號(hào),去作為PWM計(jì)數(shù)器的第二初始化源。如此即可完成EtherCAT系統(tǒng)和電機(jī)控制系統(tǒng)之間的同步。
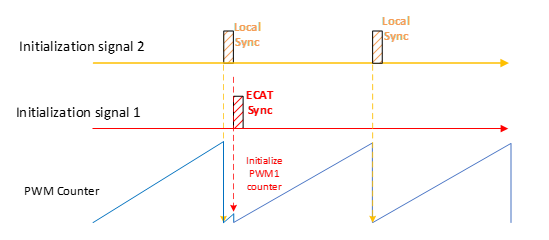
如圖給出了PWM-1的初始化示意圖,首先是初始化信號(hào)2為local初始化信號(hào),該信號(hào)確定了PWM的周期,當(dāng)計(jì)數(shù)到固定值時(shí)便會(huì)初始化PWM計(jì)數(shù)器。初始化信號(hào)2即為EtherCAT的sync信號(hào),該信號(hào)并不會(huì)每個(gè)PWM周期都產(chǎn)生,該參考設(shè)計(jì)EtherCAT同步頻率為4kHz,PWM頻率為16kHz,因此,每4個(gè)PWM周期產(chǎn)生一個(gè)sync信號(hào),當(dāng)sync信號(hào)到來時(shí),PWM波同樣會(huì)被初始化。
圖中為了突出同步的效果,刻意將sync信號(hào)與local sync信號(hào)區(qū)別開來,實(shí)際應(yīng)用中,在經(jīng)過第一次sync初始化后,后續(xù)的兩個(gè)同步信號(hào)基本處于完全同步的狀態(tài),不會(huì)導(dǎo)致PWM波的突變。
在完成了EtherCAT與電機(jī)控制同步的基礎(chǔ)上,下期將會(huì)給大家介紹如何設(shè)計(jì)一個(gè)高動(dòng)態(tài)性能的電機(jī)控制系統(tǒng)。下周見!
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6952瀏覽量
114085 -
電機(jī)控制
+關(guān)注
關(guān)注
3600文章
2131瀏覽量
277687 -
ethercat
+關(guān)注
關(guān)注
19文章
1507瀏覽量
45173
原文標(biāo)題:i.MX RT1180實(shí)現(xiàn)EtherCAT+伺服控制-(2)
文章出處:【微信號(hào):NXP_SMART_HARDWARE,微信公眾號(hào):恩智浦MCU加油站】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
深度解析 | 低抖動(dòng)高精度EtherCAT多軸控制的實(shí)現(xiàn)與實(shí)踐案例
EtherCAT(以太網(wǎng)控制自動(dòng)化技術(shù))
TMC8670 – 集成EtherCAT通訊和FOC伺服運(yùn)動(dòng)控制芯片適用2/3相永磁同步電機(jī)
labview通過Ethercat控制伺服電機(jī)
通過實(shí)時(shí)網(wǎng)絡(luò)實(shí)現(xiàn)多軸運(yùn)動(dòng)控制的同步
如何實(shí)現(xiàn)從網(wǎng)絡(luò)主機(jī)直至電機(jī)終端的全程同步
如何利用F28388實(shí)現(xiàn)與PC之間的EtherCAT通訊
工業(yè)通訊中CANOPEN轉(zhuǎn)EtherCAT的轉(zhuǎn)換
CC-LINKIE轉(zhuǎn)EtherCAT協(xié)議具體應(yīng)用
電機(jī)群變頻調(diào)速的同步控制
永磁同步電機(jī)最優(yōu)直接轉(zhuǎn)矩控制原理及實(shí)現(xiàn)方法
控制系統(tǒng)之間如何實(shí)現(xiàn)時(shí)鐘同步?
如何同步運(yùn)行?--基于EtherCAT的柔性電機(jī)驅(qū)動(dòng)系統(tǒng)

如何實(shí)現(xiàn)永磁同步電機(jī)的智能控制
基于睿擎派輕松玩轉(zhuǎn)EtherCAT主站,實(shí)現(xiàn)電機(jī)精確控制



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論