 吉林大學,遼寧材料實驗室:具有交叉梯度結構的仿生柔性壓阻傳感器,可實現高性能觸覺感應
吉林大學,遼寧材料實驗室:具有交叉梯度結構的仿生柔性壓阻傳感器,可實現高性能觸覺感應

通過擴展和集成單個傳感器,實現了對多觸覺信息的高精度感知和有效的人機交互。柔性電子技術的進步正在推動從傳統的剛性傳感器架構向具有生物相容性、皮膚適應性和多功能集成的系統過渡,克服了表皮兼容性和曲面適應性的局限性。與適應性有限的傳統剛性傳感器相比,柔性傳感器的發展顯著擴大了傳感技術的潛在應用。憑借其卓越的靈活性和適應性,柔性傳感器可以模仿甚至超越人類皮膚的觸覺傳感功能,緊密適應各種不規則表面,以提供更精確的傳感能力。這些獨特的特性使柔性傳感器能夠在可穿戴設備、醫療監測、機器人皮膚和其他領域顯示出廣泛的潛在應用。
觸覺感知是一個關鍵的感知模塊,用于實現人類和機器人與環境之間的精確交互。近年來,研究人員一直在積極探索新材料、觸覺敏感微結構和響應機制,以解決柔性觸覺傳感器在性能和應用方面面臨的挑戰。目前,已經開發了幾種類型的柔性觸覺傳感器,包括壓阻式、電容式、壓電式、摩擦電式、磁性和光學響應機制。其中,壓阻式觸覺傳感器因其穩定性高、結構簡單、易于集成而得到了廣泛的研究。盡管取得了重大進展,但在實現柔性觸覺設備的高效感知和響應穩定性方面仍存在關鍵挑戰。例如,當前的觸覺傳感器通常難以同時實現高靈敏度、寬檢測范圍和低檢測限。最佳檢測模式應在低壓區域結合高靈敏度和低檢測限,同時在高壓區域保持穩定的信號輸出特性和寬動態范圍,這將顯著擴大其在不同場景中的應用潛力。此外,在器件制造過程中,導電材料和柔性基板之間的弱界面結合在循環負載下極易發生接觸失效,導致信號漂移或導電網絡斷裂,嚴重損害信號輸出和長期穩定性。
特別是,感測層中微結構形狀和分布的設計是提高觸覺傳感器檢測范圍和靈敏度的關鍵因素。目前,微觀結構設計包括傳統的幾何形狀(例如,金字塔、柱狀、多孔結構等),還涉及仿生自然表面特征結構(例如,模仿甲蟲、珍珠層、玫瑰花瓣、荷葉、蟬翼和貓舌。這些微結構通常使用3D打印、犧牲/仿生模板方法、光刻和靜電紡絲等技術進行設計。由于其卓越的精度和形狀適應性,3D打印技術能夠精確制造具有復雜幾何形狀的微結構。因此,它已成為微結構制造中最常用和最有效的技術之一。然而,常用的壓敏彈性體材料,如PDMS和Ecoflex,由于其模量特性,通常會導致脫模缺陷、微觀結構損壞和壓縮回彈滯后等問題,從而引發界面粘附效應。此外,多步成型工藝可能會導致微觀結構形態的累積變形,從而導致靈敏度降低、基線漂移,甚至器件的功能失效。除了微觀結構優化,引入高性能電極材料也是提高傳感器性能的有效策略。例如,碳基納米材料、金屬納米材料、MXene和導電聚合物因其優異的導電性、機械性能和柔韌性而被廣泛用于制備柔性傳感器。這些材料可以有效地與柔性基板(如PDMS、PET、PI等)集成,以確保有效的電路傳導和穩定性。特別是,MXene表現出優異的導電性和可調的表面特性,使高性能和柔性器件之間能夠完美兼容。MXene基導電油墨與微電路印刷技術的集成實現了室溫下高精度和高效率的電路制造,增強了傳感器的可擴展性和一致性。
本文亮點
1. 本工作受蛇鱗結構布置的啟發,構建了一種具有交叉傾斜梯度(CTG)架構的創新柔性觸覺傳感器。
2. 該傳感器通過超密集傳感點設計和多梯度結構補償機制的協同效應,實現了2.116 kPa?1的高靈敏度和511.11 kPa的寬檢測范圍。
3. 通過界面兼容性設計和等離子體表面處理,使用柔性電子直寫系統在室溫下制備了具有高摩擦阻力、高導電性和強界面粘附性的MXene/PET電極。
4. 仿生傳感器具有出色的響應特性(響應時間為8ms)、長期運行穩定性(>8500次循環),并且沒有明顯的信號漂移。其出色的靈敏度使其能夠全面感知人體姿勢。
5. 通過擴展和集成單個傳感器,實現了對多觸覺信息的高精度感知和有效的人機交互。
圖文解析
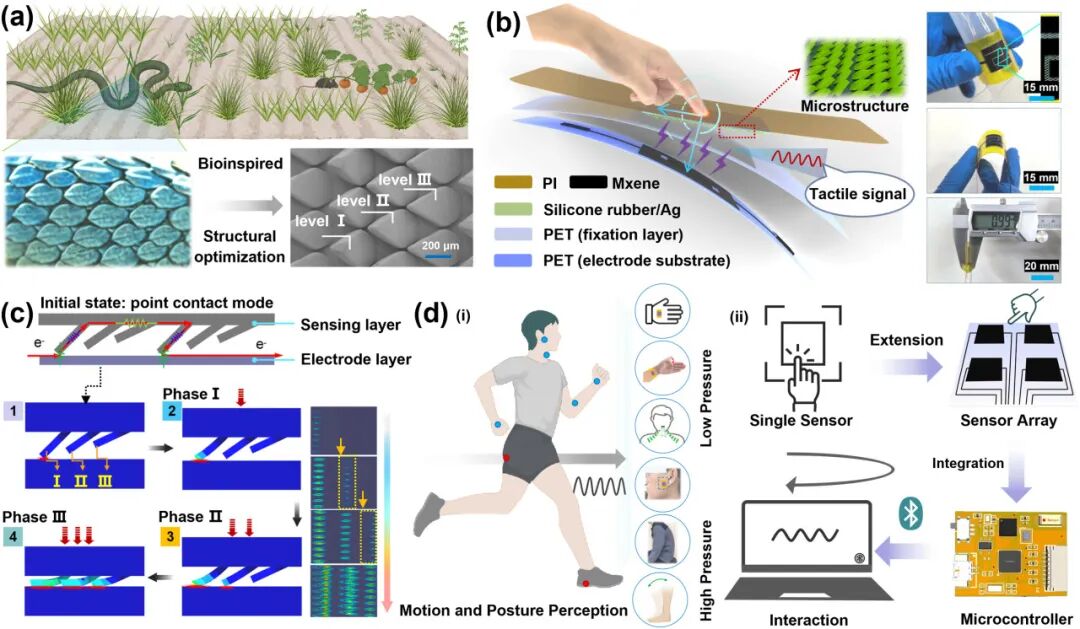
圖1. CTG仿生觸覺傳感器的設計和應用示意圖。(a)仿生和微結構設計。(b)CTG壓力傳感器的組成和結構示意圖。(c)反應機制。(d)多種場景下的感知應用。
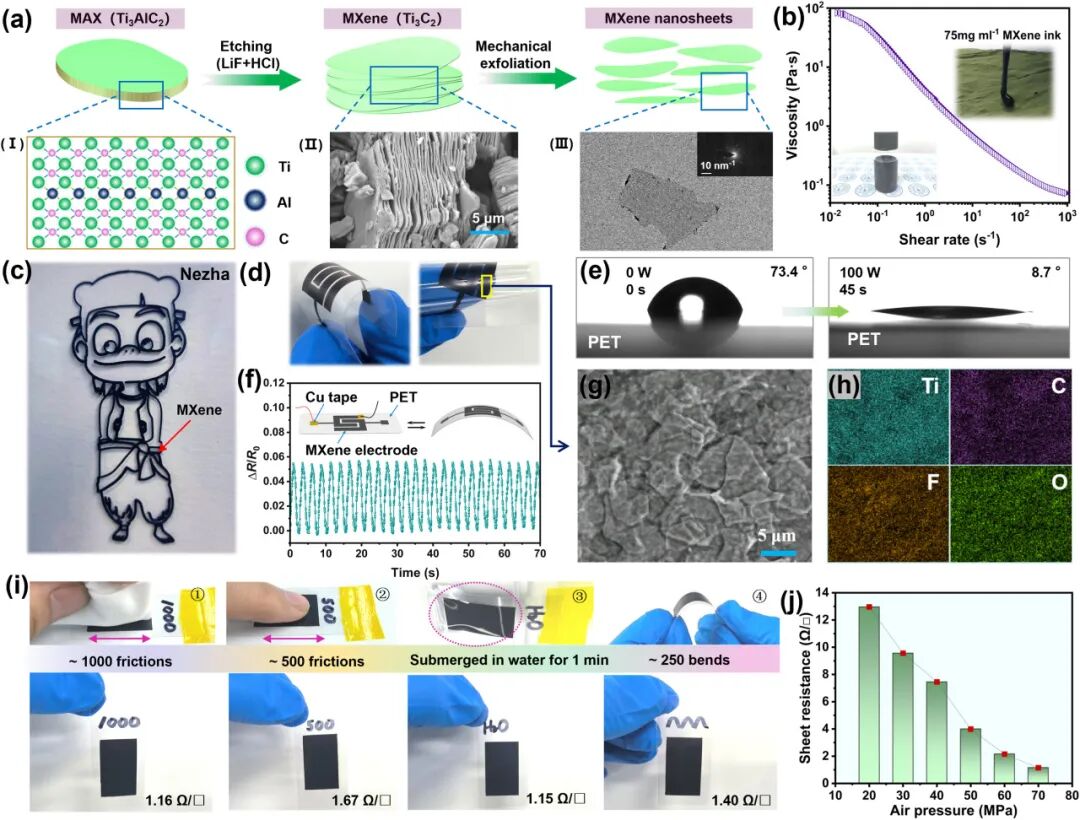
圖2. PET基MXene叉指電極的制備和表征。(a)使用HCl和LiF從MAX相材料蝕刻Al原子的MXene制造工藝示意圖。一MAX結構圖。(Ⅱ)具有手風琴狀多層結構的Ti3C2。(三)MXene納米片。(b)75 mg/mL MXene油墨的粘度特性。(c)以復雜線條為特征的MXene圖案。(d)印刷在PET基板上的MXene交叉指型電極的光學照片。(e)PET基材經親水處理后的接觸角變化。(f)PET基MXene叉指電極的應變循環穩定性。(g)MXene薄片均勻堆疊的電極路徑。(h)圖2g中MXene電極的EDS元素映射圖像,包括Ti、C、F和O。(j)不同印刷參數下MXene電極的電導率。
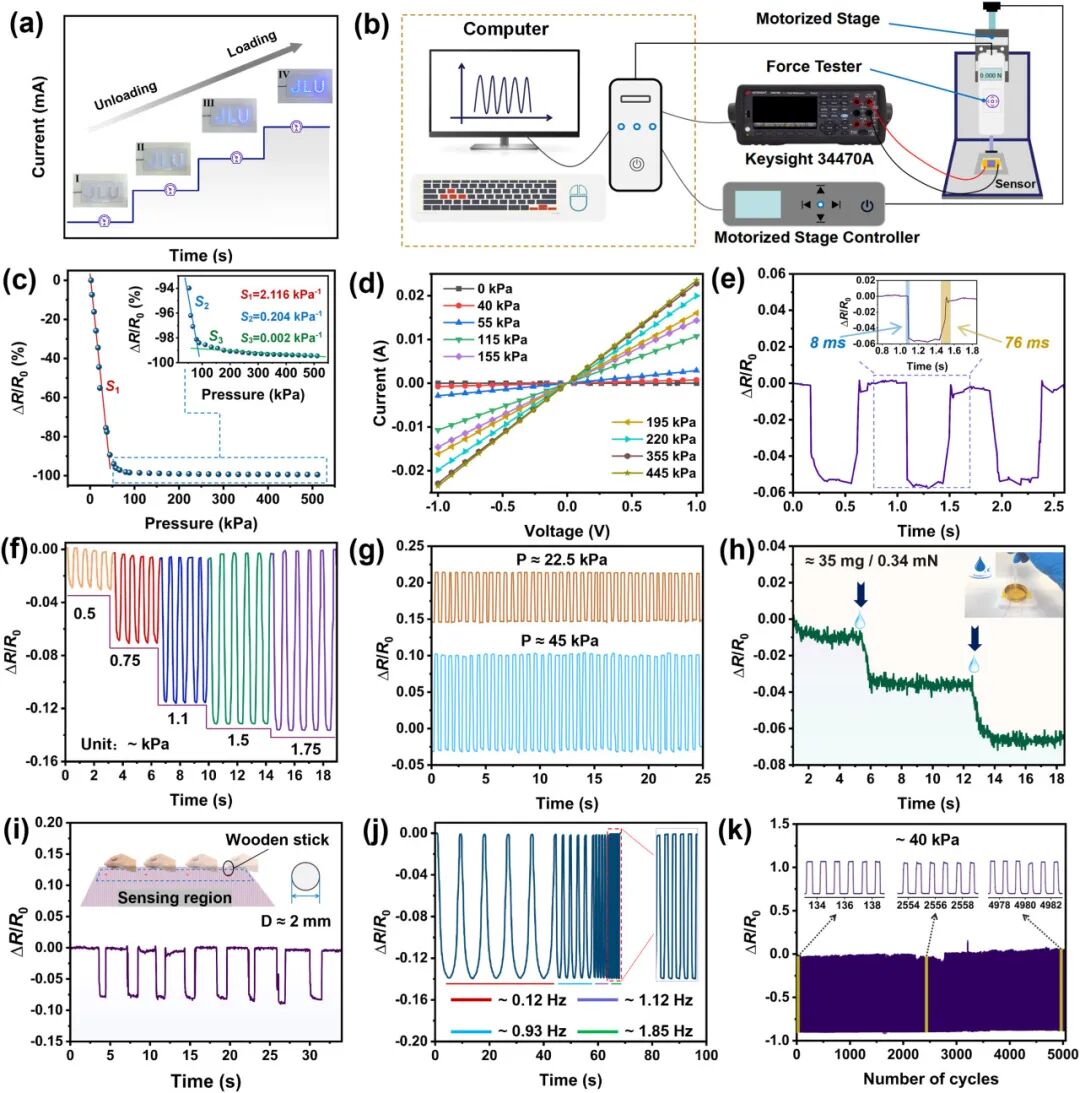
圖3. CTG柔性觸覺傳感器的壓力傳感性能。(a)基于CTG傳感器的觸覺開關。(b)電信號測試系統。(c)CTG傳感器的電阻信號與壓力變化曲線。(d)特定壓力(0-445 kPa)下傳感器的I-V關系。(e)CTG傳感器的響應和恢復時間。(f)可變壓力下CTG傳感器的動態響應特性。(g)傳感器在約22.5 kPa和45 kPa下的循環穩定性。(h)CTG傳感器對一滴水(約35mg)引起的相對電阻變化做出響應,顯示出非常低的檢測限。(i)不同感測區域小規模接觸刺激下的電阻響應。(j)CTG傳感器在連續可變頻率下的信號輸出性能。(k)CTG傳感器在40 kPa相對壓力下的穩定性測試約5000次循環。
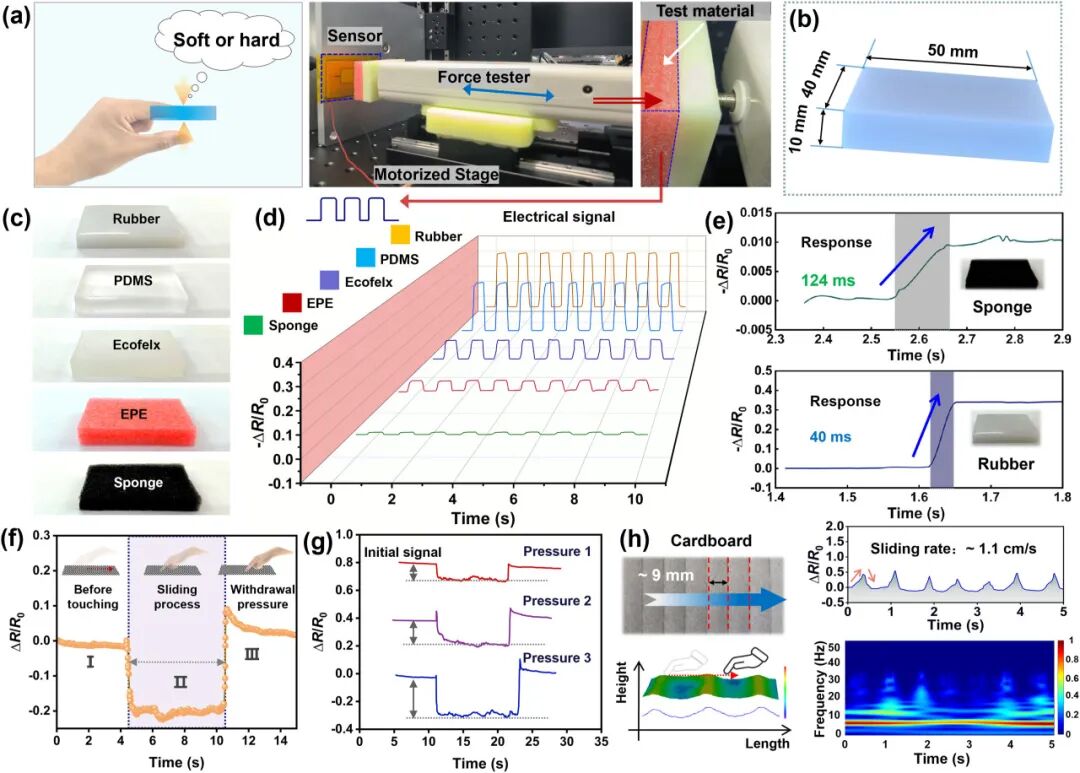
圖4. 基于壓力傳感的柔軟度和滑動識別。(a)柔軟度和硬度測試平臺。(b–c)5種材料(50 mm×40 mm×10 mm)的光學照片,包括橡膠、PDMS、Ecoflex、EPE和海綿。(d)為樣品生成的電阻波形曲線。(e)海綿和橡膠產生的電阻信號的時域特性差異。(f)傳感器在隨機滑動速度下的整個信號交互過程。(g)三種不同接觸壓力下的滑動特性信號:壓力1<壓力2<壓力3。(h)CTG傳感器在具有規則結構的紙板上以約1.1 cm/s的速度滑動產生的時域信號。

圖5. CTG傳感器能夠實現運動/姿勢傳感的全范圍壓力檢測,覆蓋從低壓到高壓區域的寬響應范圍。(a)手掌連續打開和關閉期間的電阻信號變化。(b)檢測拇指屈伸運動引起的手腕局部肌肉區域的小位移變化。(c)手臂肌肉的運動檢測。(d)連續檢測手動單次、雙次和三次按壓塑料瓶產生的傳感器電信號。(e)探測深呼吸引起的微弱喉部信號。(f)張開和閉合口腔時TMJ活動觸發的電信號響應。(g)腳部運動檢測。(h)實時監測坐姿變化。
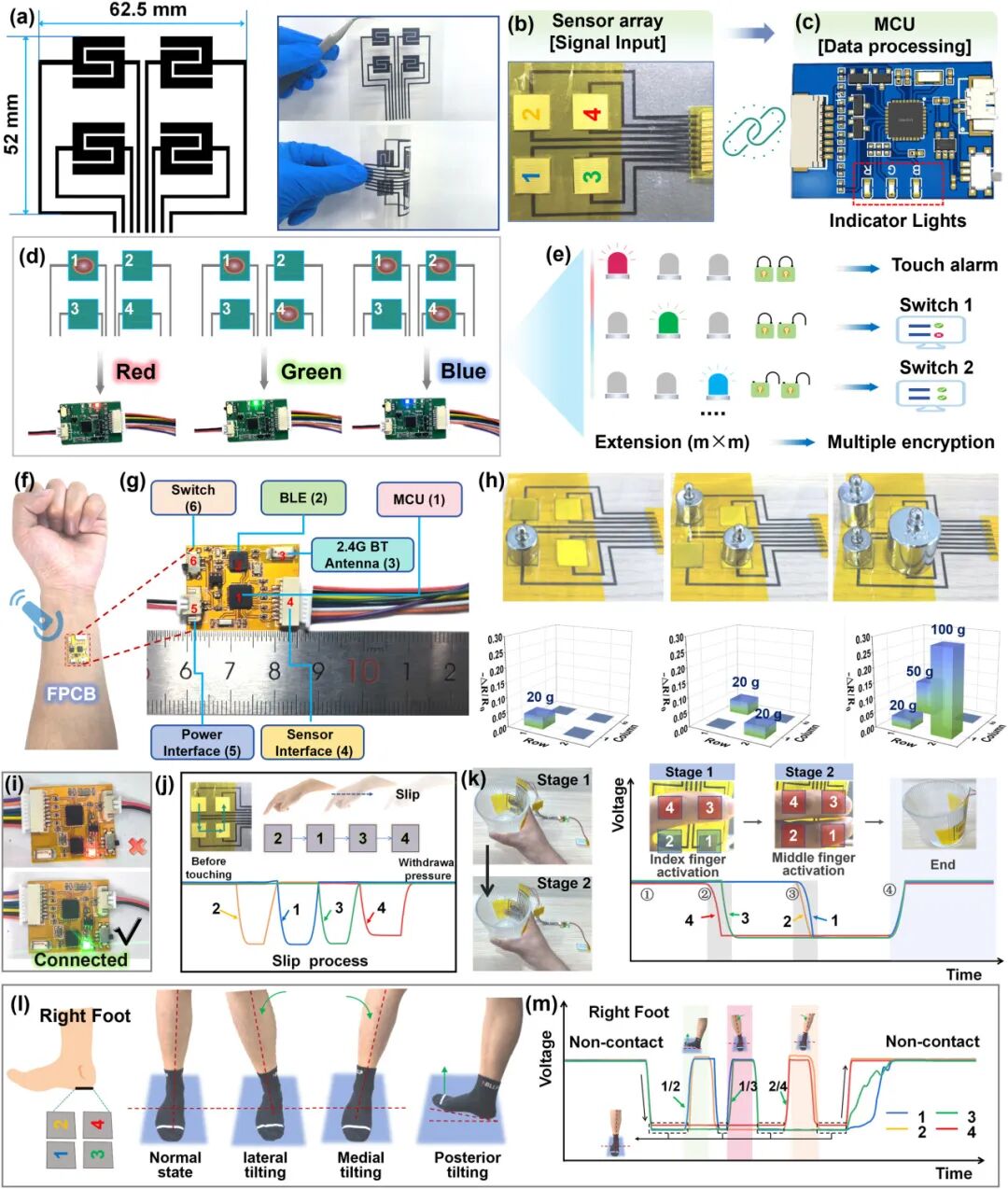
圖6. 用于人機交互的觸覺傳感器。(a)2×2 MXene電極陣列的光學圖像。(b)CTG觸覺傳感器陣列,帶有四個標記為1-4的觸覺開關。(c)微控制器單元(MCU)。(d)基于多通道觸覺開關控制的LED燈交互應用。(e)多個觸覺開關,用于安全加密應用。(f–g)FPCB集成了藍牙無線傳輸功能,配備了四通道傳感器接口。(h)不同重量的傳感器陣列產生的壓力分布。(i)控制模塊的操作模式。(j)手指分別在傳感器2、1、3和4上滑動的響應曲線。(k)握住水杯時觸發的四個傳感器的信號響應曲線。(l–m)腳姿勢的識別。
來源:柔性傳感及器件
-
觸覺傳感器
+關注
關注
4文章
123瀏覽量
10408 -
仿生傳感器
+關注
關注
1文章
14瀏覽量
3050 -
柔性傳感器
+關注
關注
1文章
120瀏覽量
4861
發布評論請先 登錄
西湖大學:研發CMOS兼容壓力傳感器陣列,實現精準觸覺感知功能
機房/倉庫/實驗室專屬:網絡溫濕度傳感器,環境安全一手握
穩定性能更強,大連義邦最新引入一款性能全面躍升的UN系列壓阻油墨

中科院/重慶大學:仿生“電子皮膚”獲突破!梯度模量設計讓傳感器實現“寬壓域、高靈敏、抗漂移”

天合光能高紀凡受聘出任吉林大學校友會第四屆理事會副會長
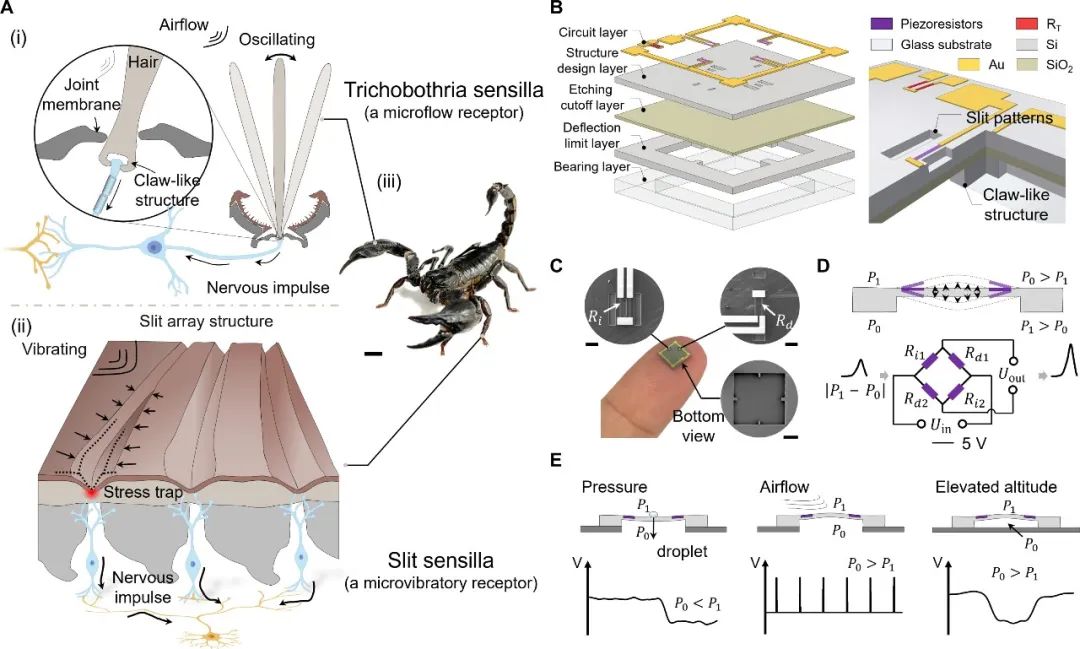
吉林大學和美國加州大學伯克利分校:研究用于智能機器人近體流動檢測的超靈敏仿生壓力傳感器
吉林大學,加州大學伯克利分校:受蝎子機械傳感機制啟發的超靈敏壓力傳感器,用于智能機器人的近體流動
具身智能機器人在檢驗檢測實驗室應用的技術路徑探討
JMC1200T柔性和可扭轉波導JUPITER
遼寧材料實驗室一行到訪季豐電子
基于Nanopaint壓感油墨系統的柔性傳感系統在體育表現監測中的應用
傳感器的壓阻原理:從微觀機制到工程應用



 工商網監
工商網監
評論