") 吉林大學和美國加州大學伯克利分校:研究用于智能機器人近體流動檢測的超靈敏仿生壓力傳感器
吉林大學和美國加州大學伯克利分校:研究用于智能機器人近體流動檢測的超靈敏仿生壓力傳感器

現(xiàn)有技術缺點
靈敏度-線性度矛盾:傳統(tǒng)傳感器通過結構放大變形提升靈敏度,但導致氣球效應,線性度顯著下降。
材料疲勞:大變形引發(fā)晶界摩擦,能量耗散導致壽命短(通常<5,000次循環(huán))。
溫度干擾:壓阻材料易受溫漂影響,需額外補償電路。
應用局限:無法兼顧高壓抗過載(>100 kPa)與微壓檢測(<1 kPa)。
文章亮點
仿生雙結構設計:模仿蝎子觸毛(爪狀根抑制膜偏轉)和裂縫感受器(應力陷阱匯聚機械能),實現(xiàn)靈敏度65.56 mV/V/kPa與線性度0.99934的協(xié)同優(yōu)化。
寬域動態(tài)響應:0-500 kPa全量程覆蓋,響應時間72 ms(恢復16 ms),耐久性>20,000次循環(huán)。
智能感知系統(tǒng):集成小波變換+ResNet18算法,識別層流/湍流及5種物體形狀(準確率85.42%)。
抗干擾能力:溫度補償模塊(RT)降低環(huán)境溫漂影響,信噪比提升40%。
應用場景
智能機器人:六足機器人近體流場感知(響應延遲<100 ms),主動避障。
工業(yè)檢測:管道泄漏監(jiān)測(0.1 kPa分辨率)與設備振動分析。
醫(yī)療康復:無創(chuàng)脈搏波形監(jiān)測(微壓檢測限30 Pa)。
人機交互:手勢識別(握拳/抓取誤差率<5%)。
總結
作者報道了一種生物啟發(fā)的壓阻式壓力傳感器(BPPS),其在0至500千帕的壓力范圍內,靈敏度和線性度分別達到65.56 (mV/V)/kPa和 0.99934 的協(xié)同增強效果。BPPS能夠區(qū)分層流、過渡流和湍流,并且通過集成小波變換算法和ResNet18深度學習網絡,識別不同形狀的接近物體,其準確率超過85.42%。作為概念驗證,BPPS已被應用于六足機器人中,以實現(xiàn)近體流場感知,從而主動避免碰撞。該研究強調了利用生物昆蟲啟發(fā)的關鍵設計概念以提高傳感性能的潛力,并為其他高精度傳感器提供了結構性見解。
02
圖文簡介
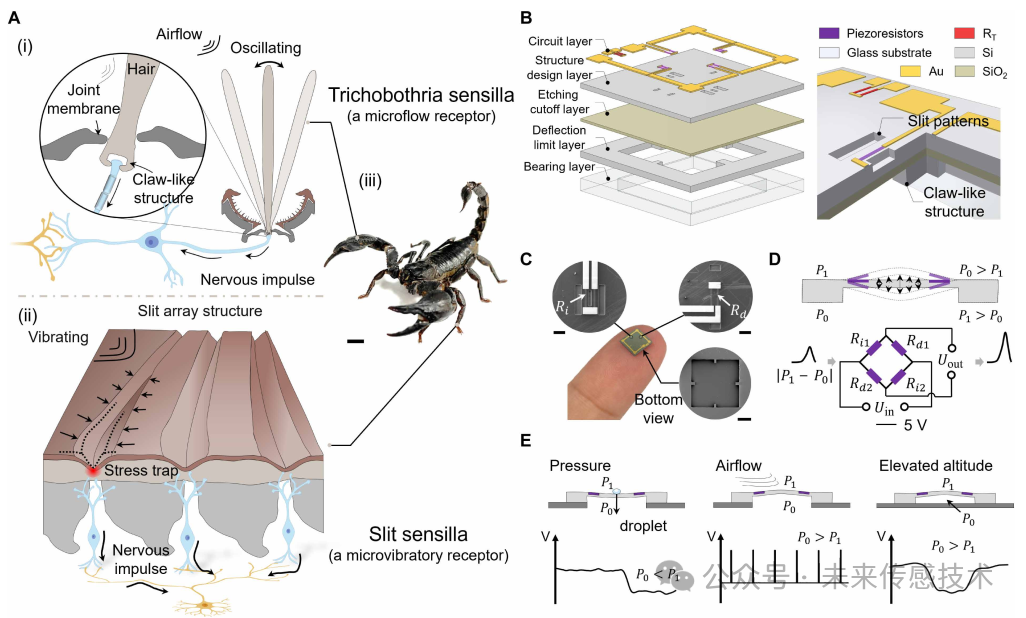
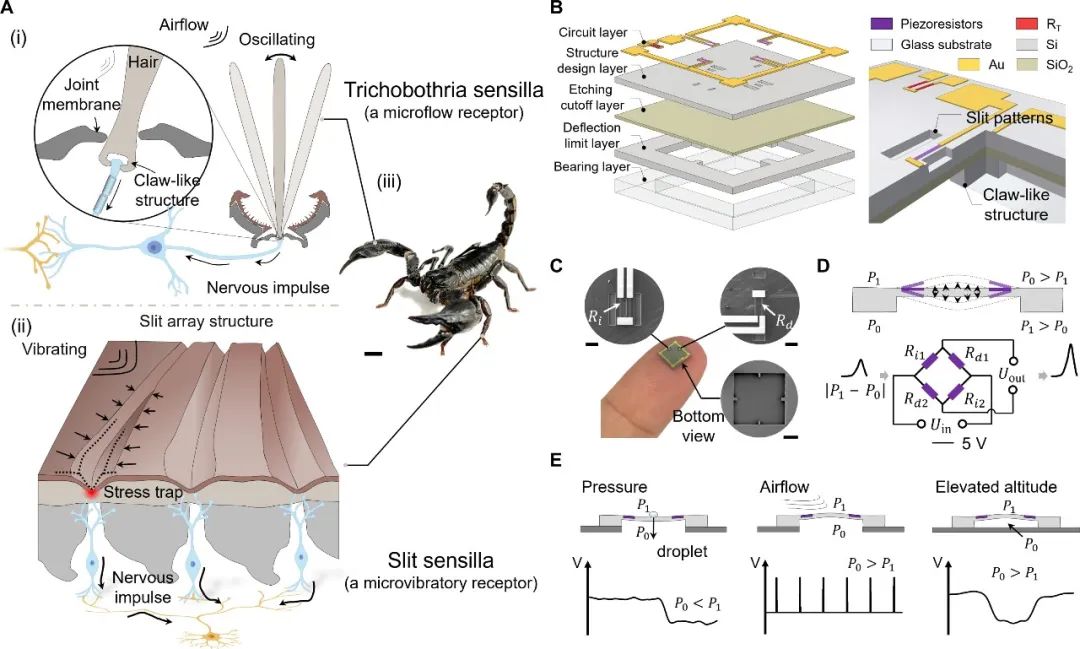
圖1. 受蝎子機械感受器啟發(fā)的高精度壓力傳感器。(A) 蝎子的體感系統(tǒng)。(i) 毛觸器感受器。(ii) 裂縫感受器。(iii) H. petersii 蝎子。比例尺,1厘米。(B) BPPS的結構及(C) BPPS的數字圖像和生物啟發(fā)應力捕捉裝置(正面)及彎曲抑制單元(背面)的掃描電子顯微鏡圖像。比例尺,100微米;100微米;和1毫米。這些圖中的電阻器:Rx (x=i,d,T)。i,增加;d,減少;T,溫度。(D) 傳感原理。當外部刺激引起感應膜上的壓力差時,BPPS將輸出相應的電壓。(E) BPPS展現(xiàn)出對多種物理量的多功能檢測能力,如壓力、氣流和高海拔。
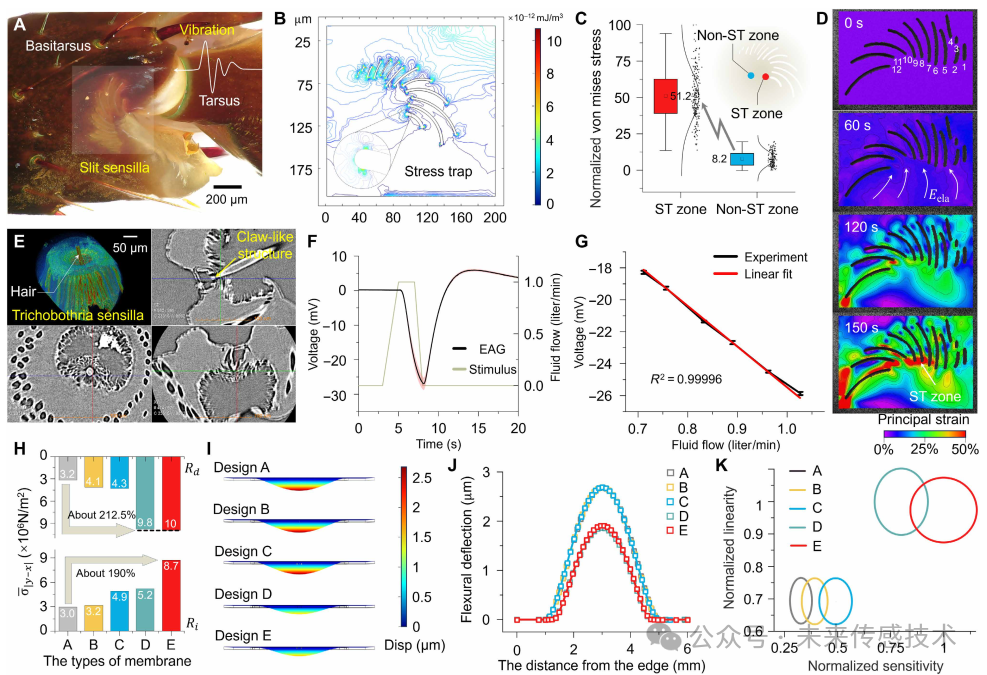
圖2. 蝎子機械感知機制的揭示與仿真優(yōu)化。(A) 裂縫感受器的放大視圖。圖中的白色區(qū)域為裂縫感受器的位置。(B) 分布于裂縫感受器尖端的應力捕集器。(C) 應力捕集區(qū)與其他區(qū)域之間的規(guī)范化馮·米塞斯應力比較。(D) DIC結果。變形通過亨基應變進行映射。(E) 3D μ-CT重建的觸毛感受器結構。爪狀結構為觸毛的末端,直接接觸神經末梢的突觸終端上的受體。(F) 在氣流為1.026升/分鐘時,觸毛感受器的電生理響應。(G) EAG幅度對氣流(0.700至1.050升/分鐘)的依賴關系及其線性擬合曲線。(H) 在設計A至E中,Ri和Rd處于最佳位置時的平均應力。(I) 在施加1 kPa恒定壓力下,感知膜的有限元應變云圖。(J) 當y設為3000 mm時,膜的彎曲撓度。設計E中的最大撓度位移顯著減少。(K) 設計A至E中靈敏度和線性的可視化。
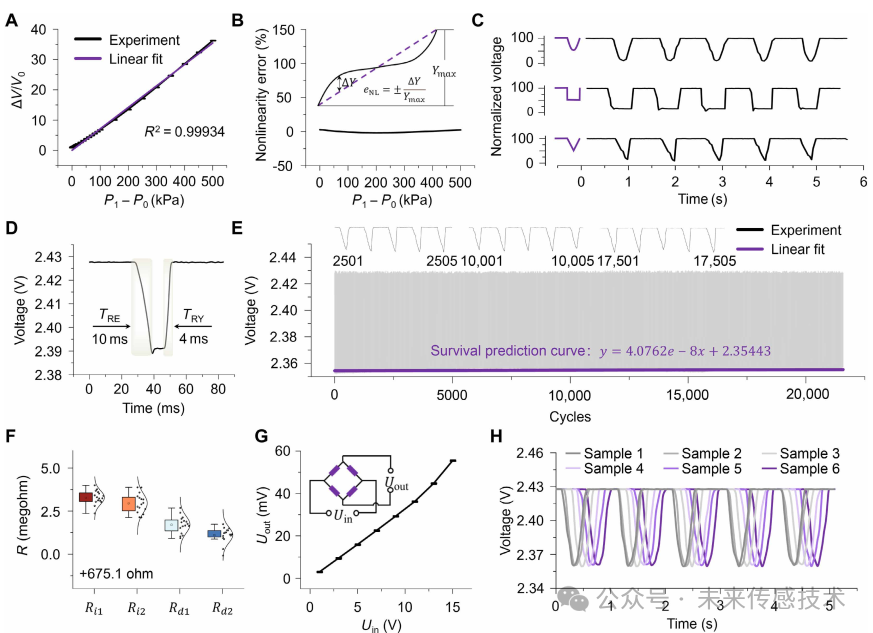
圖3. BPPS的表征。(A) BPPS在靜態(tài)壓力(0至500 kPa)下的響應曲線及其線性擬合曲線。(B) 實驗曲線與截距為0的線性擬合曲線之間的非線性誤差。(C) BPPS對三種不同輸入振動波形(1 Hz)的識別表明其識別不同振動信號的能力。(D) BPPS在1 Hz半方波脈沖下的響應速度。(E) BPPS在重復1 Hz半三角波脈沖下進行超過20,000次循環(huán)的疲勞測試結果及生存預測的峰值擬合曲線。(F) BPPS電阻值的一致性。隨機選取的16個BPPS的電阻值范圍小于0.3?。(G) 無外部刺激的輸入/輸出電壓曲線。(H) BPPS的響應一致性測試。六個BPPS在五個1 Hz半正弦波脈沖下的響應結果。
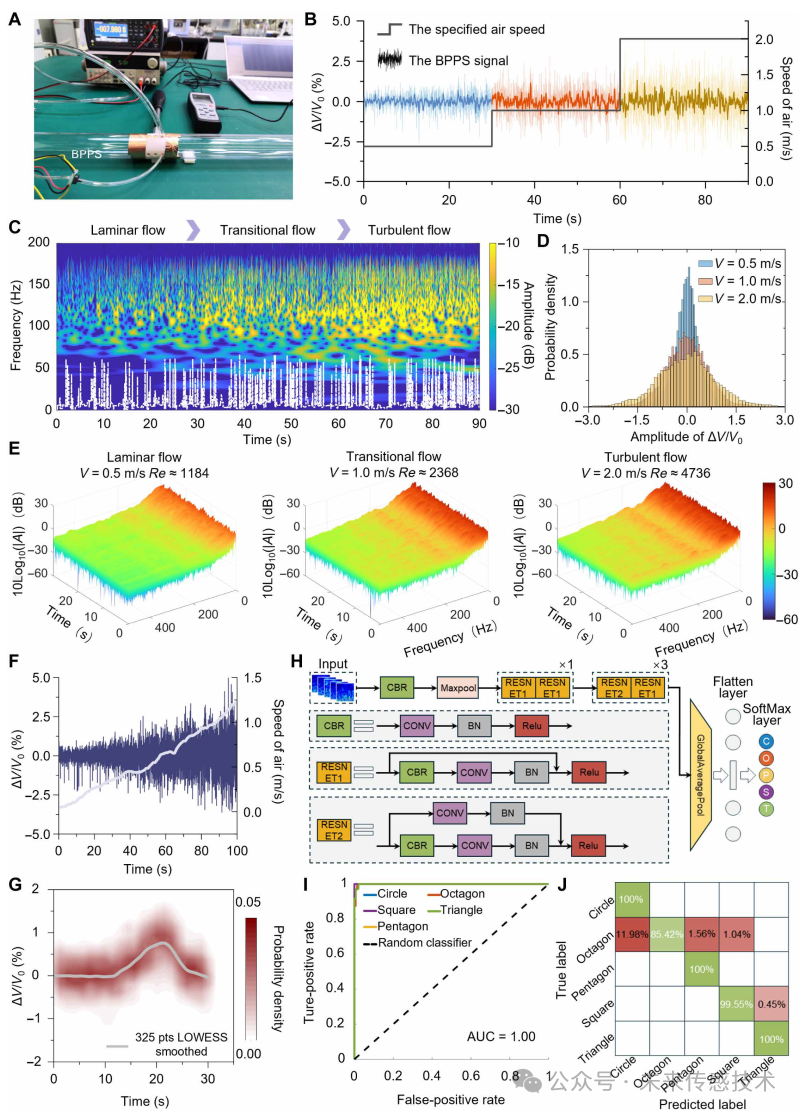
圖4. 流態(tài)檢測與識別性能。(A) 實驗設置及采集電路系統(tǒng)。(B) 在層流(0.5 m/s)、過渡流(1.0 m/s)和湍流(2.0 m/s)下的BPPS響應曲線。(C) 三種流態(tài)信號的瞬時頻率(白色虛線)和幅度(彩色映射)。(D) 幅度概率密度分布。(E) 三種流態(tài)信號的時頻譜圖(短時傅里葉變換)。(F) 流速范圍為0.1至2.35 m/s下的BPPS響應曲線。(G) 近距離測試。pts,點;LOWESS,局部加權散點平滑。(H) ResNet18深度學習網絡結構。RESNET,殘差網絡;CONV,卷積;BN,批量歸一化;Relu,修正線性單元。(I) 五信號分類接收者操作特征曲線。AUC,曲線下面積。(J) 驗證結果的混淆矩陣。
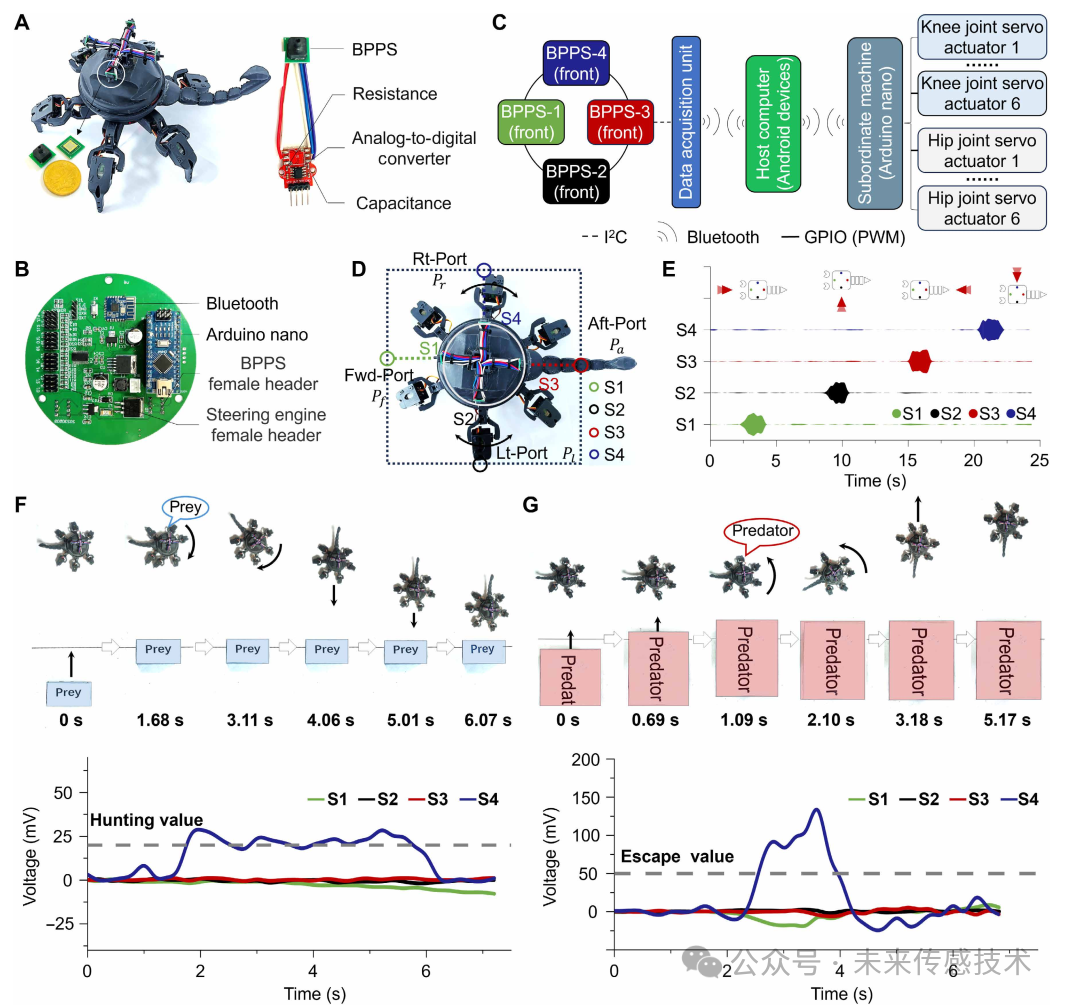
圖5. 智能機器人近體流場感知。(A) 受蝎子啟發(fā)的六足步行平臺,配備四個生物壓力傳感器 (BPPS)。 (B) 生物啟發(fā)近體流場感知機器人的PCB設計。 (C) 生物啟發(fā)機器人近體流場感知功能組件的示意圖。該系統(tǒng)主要由四個BPPS、一個微控制器單元(Atmega328P)、一個藍牙模塊(hc-08)和12個伺服執(zhí)行器(mg90s)組成。GPIO,通用輸入/輸出;PWM,脈寬調制。 (D) 四個BPPS的布置配置旨在最大化當物體接近生物啟發(fā)機器人時所檢測到的壓力差。Fwd,前;Lt,左;Rt,右。 (E) 風箏圖展示了BPPS在從不同方向以0.5 m/s速度的氣流作用下的響應,如紅色箭頭所示。 (F) 六足步行平臺對以0.25 m/s速度接近的獵物模擬器(小紙箱)的信號響應。 (G) 六足步行平臺對以0.25 m/s速度接近的捕食者模擬器的信號響應。
03
文獻來源
Pinkun Wanget al., Hypersensitive pressure sensors inspired by scorpion mechanosensory mechanisms for near-body flow detection in intelligent robots.Sci. Adv.11,eady5008(2025).doi:10.1126/sciadv.ady5008
-
壓力傳感器
+關注
關注
35文章
2524瀏覽量
182706 -
智能機器人
+關注
關注
18文章
920瀏覽量
85926 -
仿生傳感器
+關注
關注
1文章
14瀏覽量
3052
發(fā)布評論請先 登錄
太原理工大學,天津大學:研究一種采用多級微穹頂結構的柔性壓力傳感器,可實現(xiàn)超寬線性范圍和高靈敏度

陜西科技大學:研究用于人體監(jiān)測和可穿戴舒適性的全功能皮革基柔性電容式壓力傳感器

山東大學:研究用于高精度壓力和溫度認知的仿生電子掌

安徽農業(yè)大學: 開發(fā)石墨烯/聚氨酯海綿復合材料,用于柔性壓力傳感器和智能緩沖材料

耐高溫壓力傳感器芯體材質在未來的發(fā)展方向
天合光能高紀凡受聘出任吉林大學校友會第四屆理事會副會長
東華大學:研究基于石墨烯纖維的高性能壓力傳感器,具有雙邊致密結構,用于人體運動監(jiān)測
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
吉林大學,加州大學伯克利分校:受蝎子機械傳感機制啟發(fā)的超靈敏壓力傳感器,用于智能機器人的近體流動
西南大學,西華大學,河北工業(yè)大學,重慶大學:基于雙介質層的離子壓力傳感器耦合超高靈敏度和寬范圍檢
中國成功研發(fā)蚊子大小仿生機器人
南京工業(yè)大學:仿生觸覺傳感系統(tǒng)讓機器人擁有“人類指尖”般的細膩感知
【應用】TE高精度壓力傳感器SM9541系列可精確檢測通風系統(tǒng)中的壓力變化

仿生傳感器:讓機器擁有“生命感知”的神奇科技
研究用于人體足底壓力和步態(tài)分析的高靈敏度壓力傳感器



 工商網監(jiān)
工商網監(jiān)
評論