 吉林大學,加州大學伯克利分校:受蝎子機械傳感機制啟發的超靈敏壓力傳感器,用于智能機器人的近體流動
吉林大學,加州大學伯克利分校:受蝎子機械傳感機制啟發的超靈敏壓力傳感器,用于智能機器人的近體流動

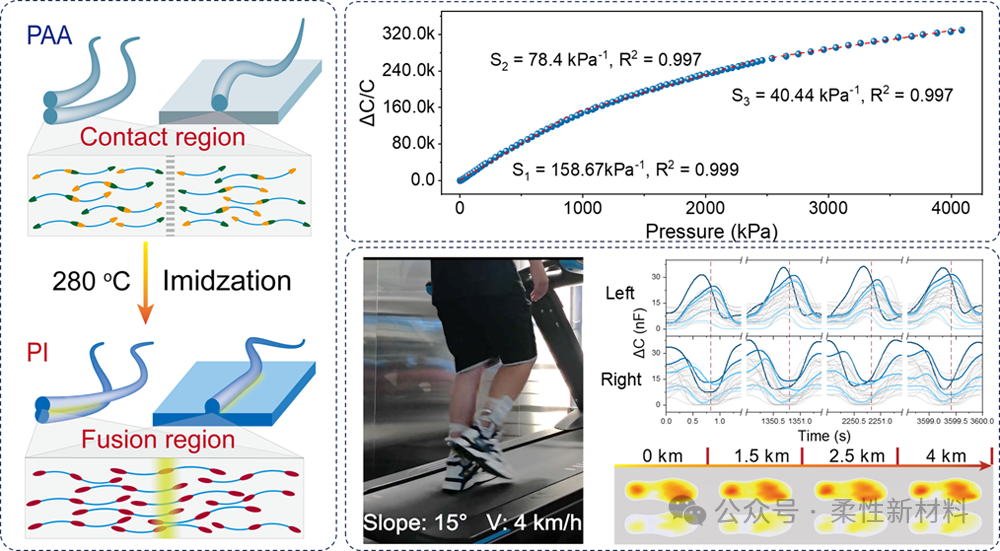
壓力傳感器可以將壓力刺激轉化為電信號,在健康監、智能機器人和人機交互方面具有各種有前景的應用。硅基壓阻式壓力傳感器因其高耐用性、低能耗和批量制造能力而得到了很好的研究和廣泛的商業產品應用。盡管在開發高性能壓阻式壓力傳感器方面取得了重大進展,但靈敏度和線性范圍之間的權衡仍然是一個巨大的挑戰,并影響了傳感精度。具體而言,壓阻式壓力傳感器的靈敏度直接由壓敏電阻中的應力決定,傳統設計使用特殊的梁或島結構來放大變形,但它們也加劇了氣球效應(即膜中軸向應力的增加),這會顯著降低線性度。此外,大變形會引起晶界摩擦、位錯和缺陷的傳播,從而在非彈性勢中耗散大量能量,導致線性度降低。
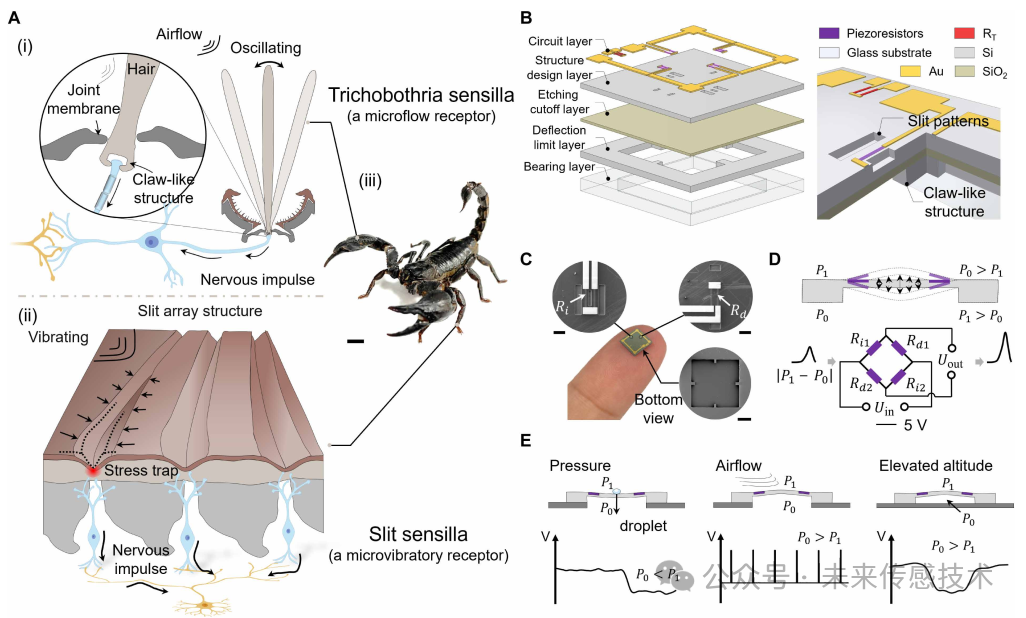
在自然界中,生物體已經進化出卓越的感知能力,具有非凡的感知能力來適應復雜和惡劣的生活環境,這為人工傳感系統的發展提供了靈感。蝎子的視力逐漸衰退,已經進化出一種高精度的機械感測系統,該系統由毛足蟲感器組成,用于感知氣流的變化,并由狹縫感器檢測地面的振動。蝎子毛狀體感器的特征是長而細的毛干。毛孢菌感器的根表現出由于局部增生而形成的爪狀結構,爪尖直接接觸神經末梢突觸末端的受體。與傳統的毛發狀機械感受器相比,爪狀根部結構有效地抑制了感覺膜的偏轉位移,從而使蝎子能夠以高度線性的方式感知壓力信號。另一方面,狹縫感器由12個在外骨骼平面向外輻射的狹縫以及位于狹縫尖端下方的機械感覺神經元組成。當振動信號刺激狹縫感受器時,狹縫有效地促進了分散的機械能的會聚,類似于蝎子如何構建應力陷阱(ST)來捕獲應力。相應的神經元將機械能轉化為膜電位。此外,壓力集中區和神經元感受野之間的高度重疊,即所謂的“空間原理”,也顯著增強了蝎子感知周圍環境振動的敏感性。因此,蝎子的爪狀結構和狹縫結構使其能夠實現卓越的感知精度,有助于其熟練地捕捉獵物和躲避捕食者。一般來說,傳感器受到外部刺激的刺激,這些刺激會激發敏感元件產生電信號。然而,激活敏感元件所需的能量通常不足,敏感元件中的內摩擦降低了彈性勢能,導致靈敏度和線性度降低。
本文亮點
1. 本工作受蝎子高精度機械傳感機制的啟發,報道了一種仿生壓阻式壓力傳感器(BPPS),在0至500千帕的壓力范圍內,其靈敏度和線性度分別在65.56毫伏/伏/千帕和0.99934下協同增強。
2. 通過整合小波變換算法和ResNet18深度學習網絡,BPPS可以區分層流、過渡流和湍流,并識別不同形狀的接近物體,準確率超過85.42%。
3. 作為概念驗證,BPPS已被設計在六足機器人中,以實現近體流場傳感,從而主動避免碰撞。
圖文解析
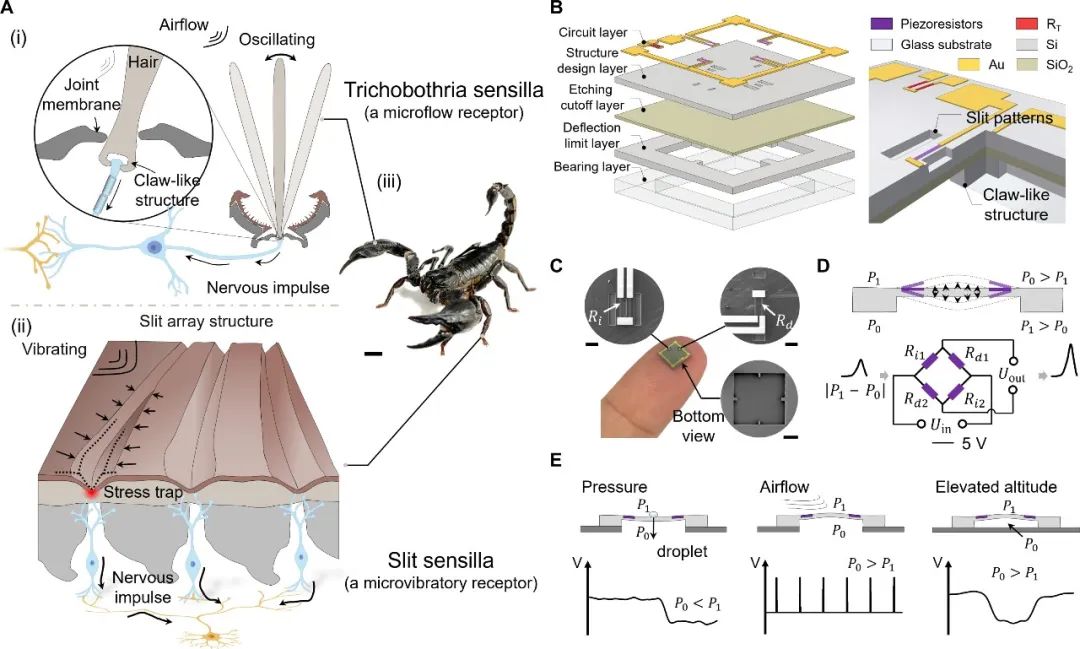
圖1. 受蝎子機械感受器啟發的高精度壓力傳感器。
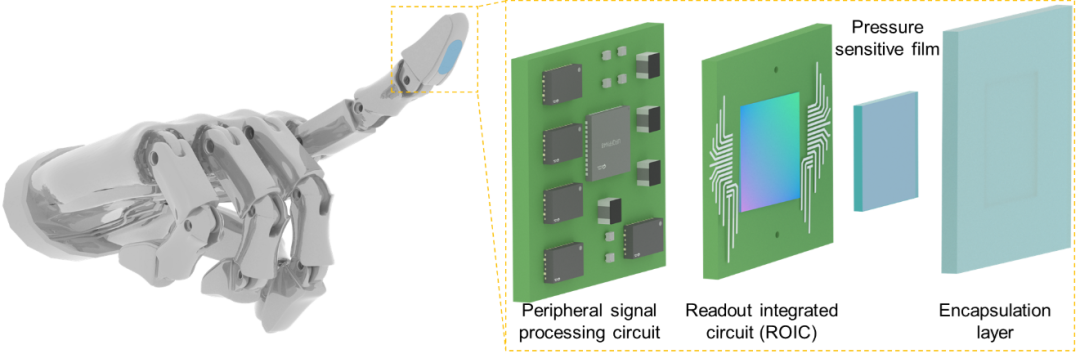
(A) 蝎子的體感系統。(i)毛孢霉感器。(ii)狹縫感器。(iii)H.petersi蝎。比例尺,1 cm。(B)BPPS結構和(C)BPPS數字圖像和仿生應力陷阱(正面)和撓曲抑制單元(背面)的SEM圖像。比例尺,100 μm;100 μm;這些圖中的電阻器:Rx(x=i,d,T)。i,增加;d,減少;T,溫度。(D)傳感原理。當外部刺激在傳感膜上產生壓差時,BPPS將輸出相應的電壓。(E)BPPS在多個物理量上表現出通用的檢測能力,如壓力、氣流和海拔高度。
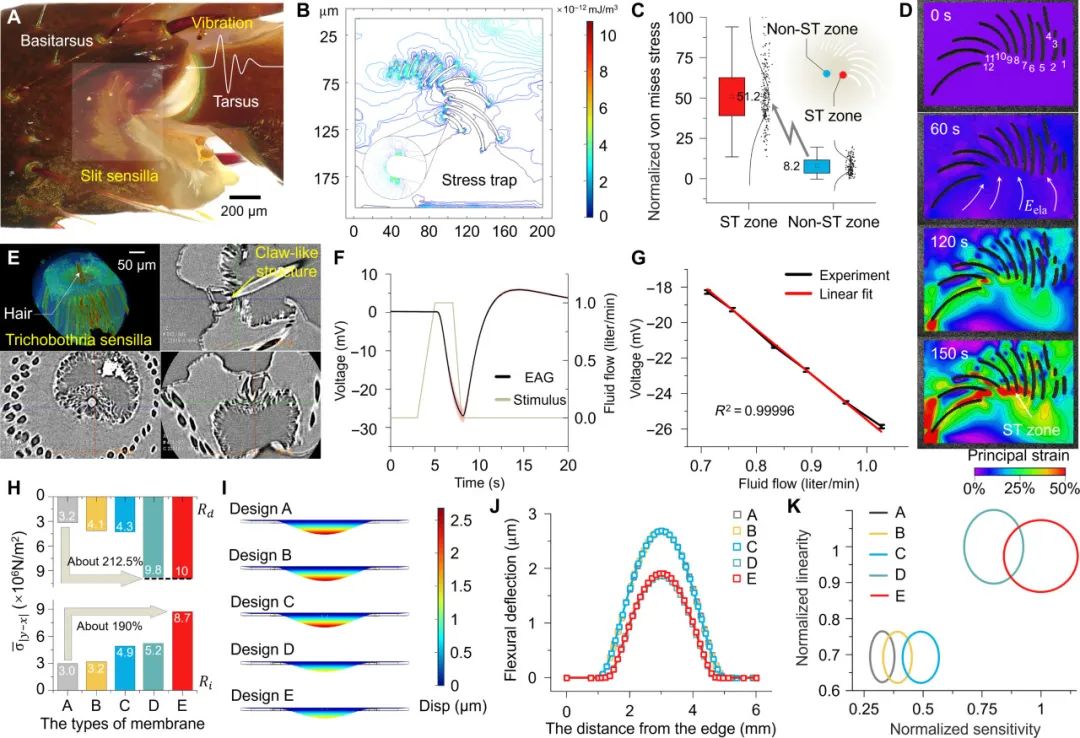
圖2. 蝎子機械傳感機制的啟示和仿真優化。
(A) 狹縫感器的放大圖。圖中的白色區域是狹縫感器位點。(B)應力陷阱分布在狹縫感器的尖端。(C)應力陷阱區域和其他區域之間的歸一化von mises應力比較。(D)DIC結果。變形用Hencky應變繪制。(E)三維μ-CT重建毛孢菌感器結構。爪狀結構是毛足蟲的末端,直接接觸神經末梢突觸末端的受體。(F)1.026升/分鐘氣流下毛孢霉感器的電生理反應。(G)EAG振幅對氣流的依賴性(0.700至1.050升/分鐘)及其線性擬合曲線。(H)Ri和Rd在設計A至E中處于最佳位置時的平均應力。(I)在1 kPa的恒定壓力下,傳感膜的有限元應變云圖。(J)將y設置為3000 mm的膜的彎曲撓度。設計E中的最大撓度位移顯著降低。(K)設計A至E中靈敏度和線性的可視化。
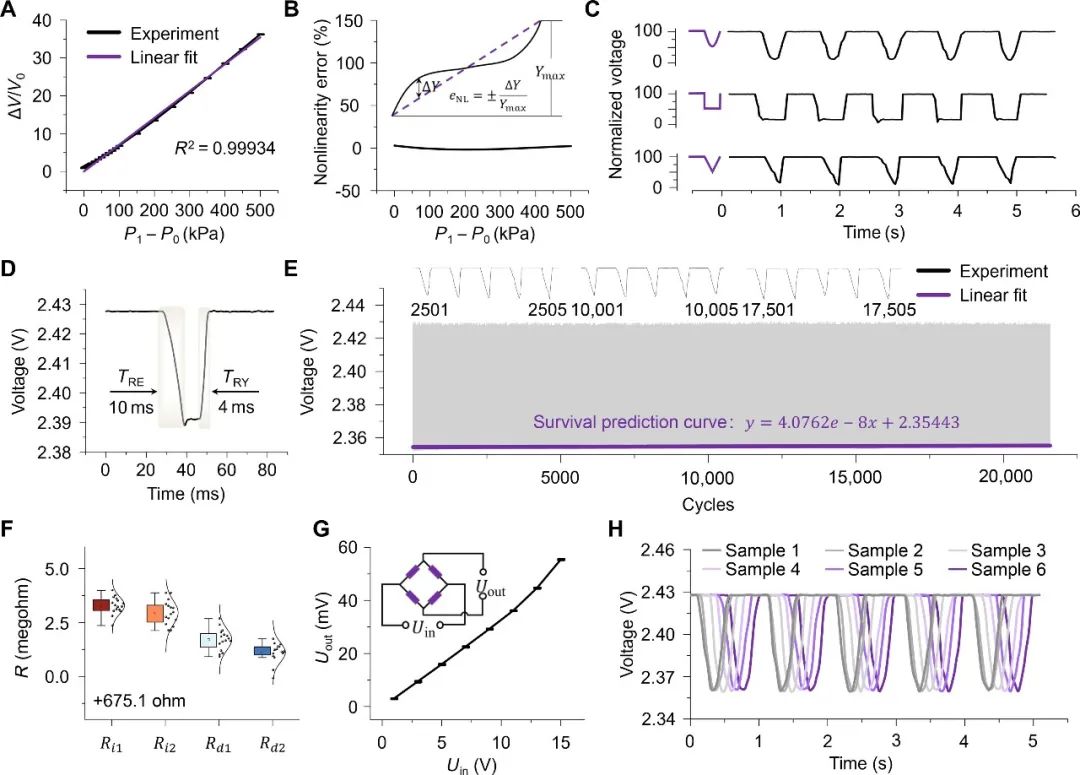
圖3. BPPS的特征。
(A) BPPS在靜壓(0至500kPa)下的響應曲線及其線性擬合曲線。(B)實驗曲線與截距為0的線性擬合曲線之間的非線性誤差。(C)BPPS對三種不同輸入振動波形(1 Hz)的識別意味著其能夠識別不同的振動信號。(D)BPPS在1-Hz半方波脈沖下的響應速度。(E)BPPS在重復1-Hz半三角波脈沖下超過20000次循環的疲勞試驗結果和用于生存預測的峰值擬合曲線。(F)BPPS電阻值的一致性。隨機選擇的16個BPPS中的電阻值范圍小于0.3?。(G)無外部刺激的輸入/輸出電壓曲線。(H)BPPS的響應一致性測試。得到了六個BPPS在1Hz五個半正弦波脈沖下的響應結果。
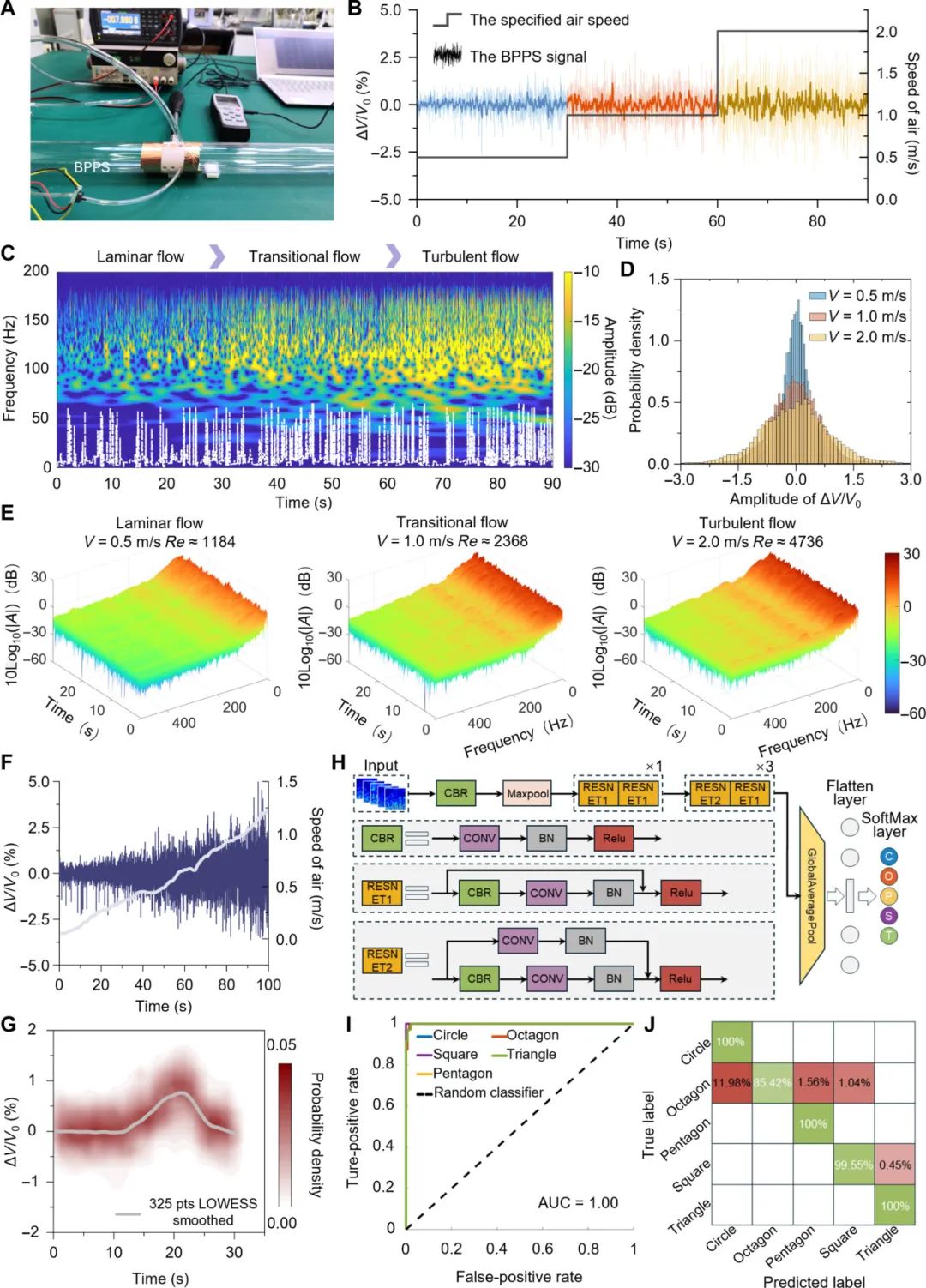
圖4. 流態檢測和識別性能。
(A) 實驗裝置和采集電路系統。(B)層流(0.5 m/s)、過渡流(1.0 m/s)和湍流(2.0 m/s)下的BPPS響應曲線。(C)三種流態信號的瞬時頻率(白色虛線)和振幅(彩色映射)。(D)振幅概率密度分布。(E)三流型信號的時頻譜圖(短時傅里葉變換)。(F)流速在0.1至2.35 m/s范圍內的BPPS響應曲線。(G)近距離測試。pts,分數;低,局部加權散點圖平滑。(H)ResNet18深度學習網絡結構。RESNET,剩余網絡;CONV,卷積;BN,批量標準化;Relu,整流線性單元。(一)五類信號分類接收機工作特性曲線。AUC,曲線下面積。(J)驗證結果的混淆矩陣。
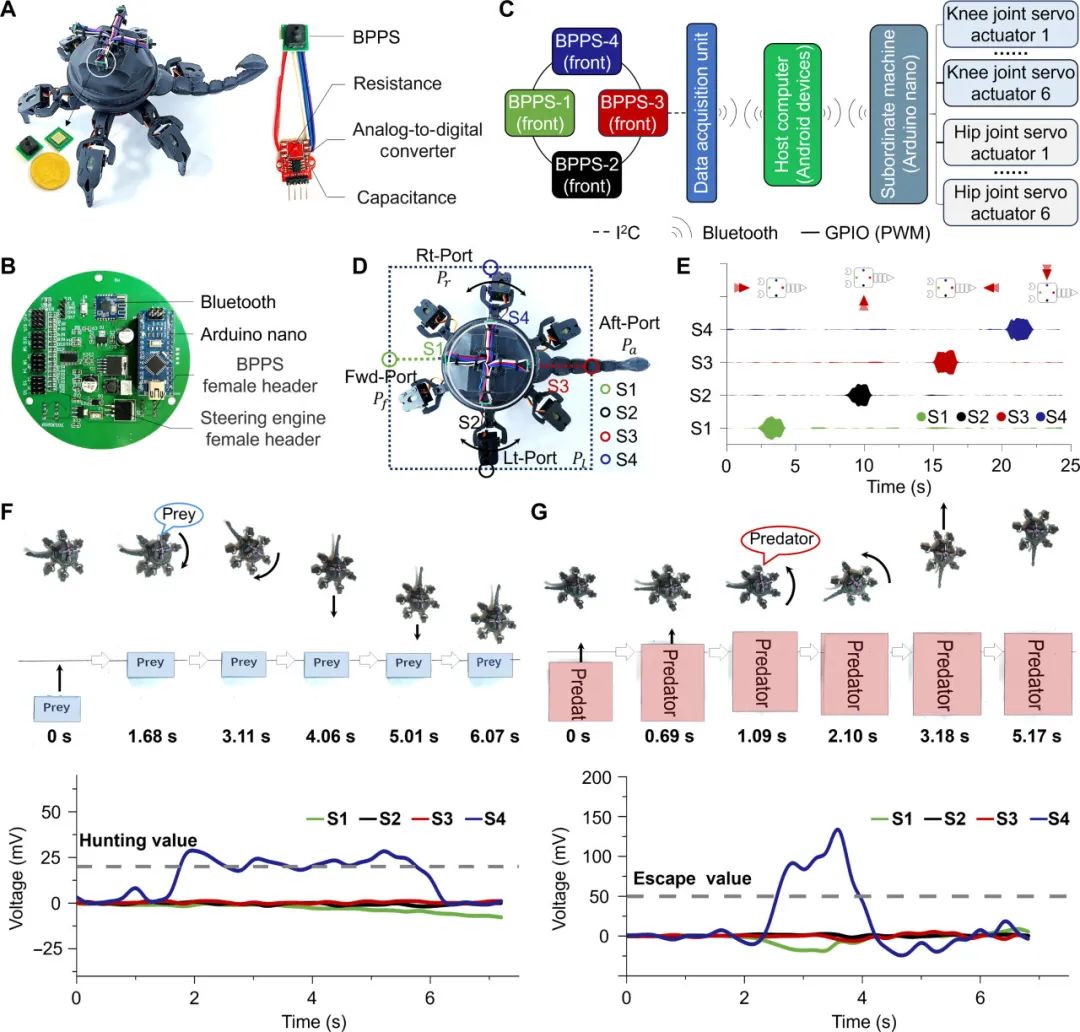
圖5. 智能機器人的近體流場感知。
(A) 這款以蝎子為靈感的六足步行平臺配備了四個BPPS。(二)仿生近體流場感知機器人的PCB設計。(C)仿生機器人用于近體流場感知的功能部件示意圖。該系統主要由四個BPPS、一個微控制器單元(Atmega328P)、一個藍牙模塊(hc-08)和12個伺服執行器(mg90s)組成。GPIO,通用輸入/輸出;PWM、脈寬調制。(D)四個BPPS的布置被配置為在物體接近仿生機器人時使檢測到的壓力增量最大化。Fwd,向前;左;右,對。(E)風箏圖顯示了BPPS在受到來自不同方向的0.5 m/s氣流時的響應,如紅色箭頭所示。(F)六足步行平臺對以0.25 m/s接近的捕食者模擬器(小紙箱)的信號響應。
審核編輯 黃宇
-
傳感器
+關注
關注
2576文章
55028瀏覽量
791243 -
智能機器人
+關注
關注
17文章
920瀏覽量
85779
發布評論請先 登錄
西湖大學:研發CMOS兼容壓力傳感器陣列,實現精準觸覺感知功能
首爾國立大學:研究生物啟發型離子傳感器:將自然機制轉化為傳感技術

安徽農業大學: 開發石墨烯/聚氨酯海綿復合材料,用于柔性壓力傳感器和智能緩沖材料

耐高溫壓力傳感器芯體材質在未來的發展方向
如何優化氣體壓力傳感器性能,提高傳感器測量精度?
吉林大學和美國加州大學伯克利分校:研究用于智能機器人近體流動檢測的超靈敏仿生壓力傳感器
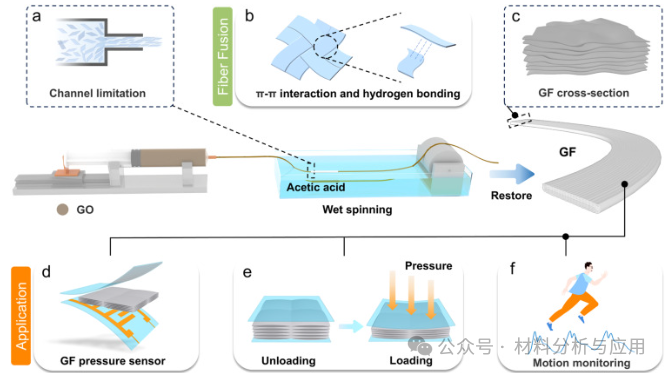
東華大學:研究基于石墨烯纖維的高性能壓力傳感器,具有雙邊致密結構,用于人體運動監測
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
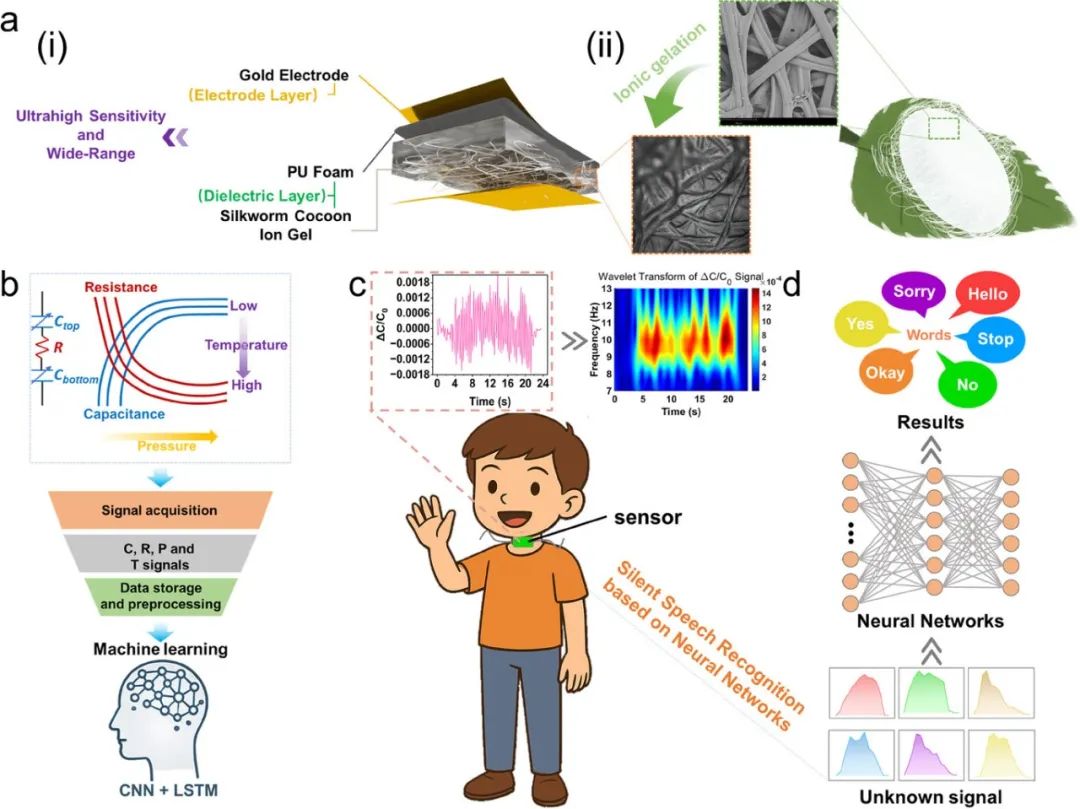
西南大學,西華大學,河北工業大學,重慶大學:基于雙介質層的離子壓力傳感器耦合超高靈敏度和寬范圍檢
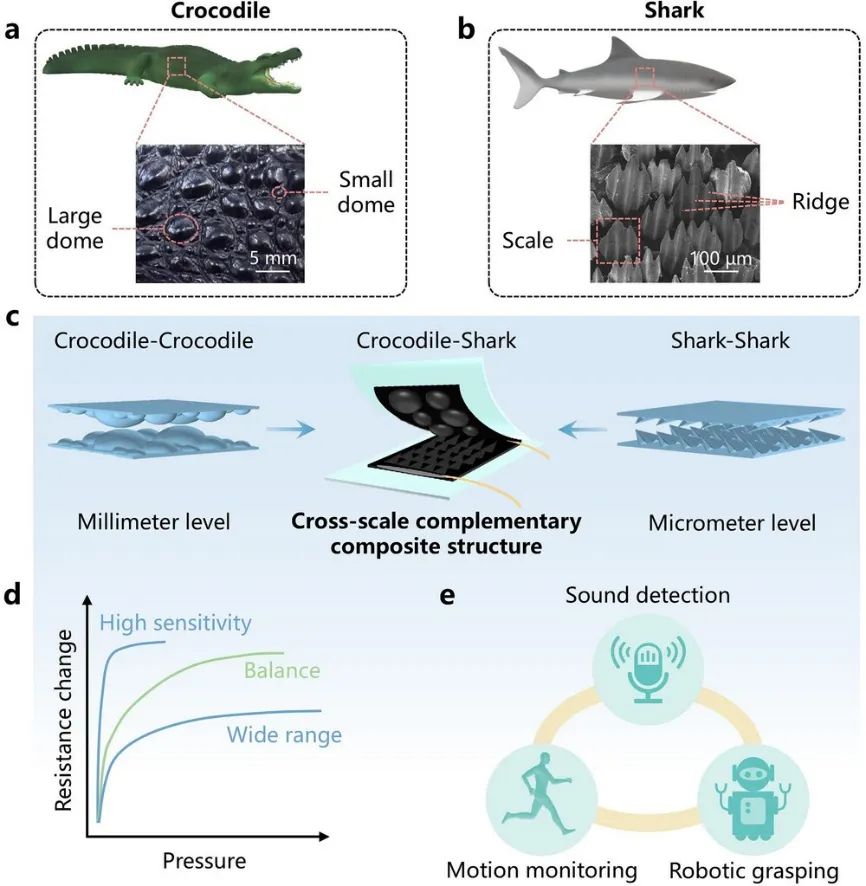
清華大學:鯊魚與鱷魚皮膚啟發的高性能壓力傳感
【選型】如何正確區分壓力傳感器和壓力變送器

瑞之辰:壓力傳感器行業未來潛力有多大
【應用】TE高精度壓力傳感器SM9541系列可精確檢測通風系統中的壓力變化
研究用于人體足底壓力和步態分析的高靈敏度壓力傳感器
電容式MEMS壓力傳感器有哪些優點?純國產電容式MEMS壓力傳感器芯片有哪些?



 工商網監
工商網監
評論