") 具身智能機器人在檢驗檢測實驗室應用的技術路徑探討
具身智能機器人在檢驗檢測實驗室應用的技術路徑探討

具身智能機器人在檢驗檢測實驗室的應用需突破多模態(tài)感知、靈巧操作、認知決策等核心技術,并通過仿真訓練、大模型微調(diào)等路徑實現(xiàn)落地。
一、核心技術瓶頸
1.多模態(tài)感知融合
觸覺與視覺協(xié)同:實驗室操作需識別微米級缺陷(如試管裂紋、液體濁度),現(xiàn)有觸覺傳感器分辨率不足(<0.1mm),且視覺-觸覺數(shù)據(jù)時空對齊誤差>15%,導致液體泄漏或器皿破損漏檢。
化學物質(zhì)感知:需突破多光譜傳感技術,實時分析試劑成分(如pH值、濃度),避免傳統(tǒng)傳感器受腐蝕性氣體干擾導致的誤判。
2.靈巧操作與自適應控制
精密器械操作:實驗室場景涉及移液槍、離心機等設備,機械手需實現(xiàn)0.01N級力控(如開合試管塞),當前關節(jié)模組精度僅達0.1N,易導致樣本污染。
抗干擾能力:電磁設備(如核磁儀)干擾下位姿飄移>5mm,需開發(fā)抗擾運動算法,確保機械臂在強磁場中穩(wěn)定操作。
3. 認知決策與任務泛化
非標流程理解:實驗室存在動態(tài)任務(如突發(fā)樣本復檢),現(xiàn)有模型對未知流程泛化率<40%,需構建缺陷知識圖譜,實現(xiàn)“異常檢測→因果推理→自主復檢”閉環(huán)。
實時決策延遲:突發(fā)狀況(如液體灑落)需80ms內(nèi)響應,傳統(tǒng)系統(tǒng)延遲>200ms,需壓縮世界模型推理時間。
4. 系統(tǒng)可靠性與安全控制
故障預判:實驗室連續(xù)作業(yè)要求故障檢出率>99%,但傳感器失效或算法誤判可能導致連鎖事故,需虛擬測試平臺模擬千級故障場景。
生化安全防護:機器人需自適應消毒流程(如UV滅菌),當前材料抗腐蝕性不足,長期接觸試劑易老化。
二、可行技術路徑
路徑1:仿生學習與專家知識遷移
機制:通過動作捕捉手套采集檢驗員操作數(shù)據(jù)(如滴定力度、震蕩頻率)→ 構建“觸覺-動作”映射庫 → 強化學習訓練靈巧操作策略。
案例:機器人通過遙操作學習治療師動作,成功完成實驗室ADL訓練(如移液操作),誤差率降低90%。
路徑2:大模型基座+垂直場景微調(diào)
架構:
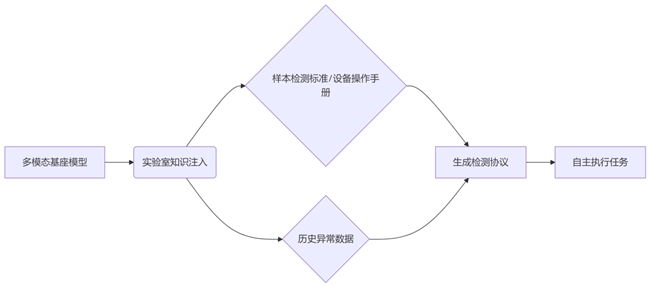
實踐:平臺支持開發(fā)者微調(diào)行業(yè)模型,在化學檢測任務中拆解“毒性分析”為7層子任務,識別準確率提升至95%。
路徑3:漸進式環(huán)境適應訓練
三階段流程
1、數(shù)字孿生仿真:高保真重建實驗室環(huán)境(如通風系統(tǒng)、設備布局),模擬10萬+操作場景。
2、遷移學習補償:通過Sim2Real技術校正現(xiàn)實偏差(如光線變化導致的視覺誤差)。
3、在線自優(yōu)化:實時采集操作數(shù)據(jù)閉環(huán)優(yōu)化模型,新設備適配時間從30天縮短至8小時。
路徑4:群體智能協(xié)同檢測
模式:多機器人聯(lián)邦學習共享知識,例如:
機器人A掃描樣本二維碼 → 云端調(diào)取檢測標準 → 機器人B執(zhí)行離心操作 → 邊緣節(jié)點融合結果生成報告。
效能:某生物實驗室采用群體協(xié)同,檢測通量提升3倍。
路徑5:輕量化硬件與抗干擾設計
材料革新:采用仿生肌腱關節(jié)實現(xiàn)6小時高負荷作業(yè),耐腐蝕涂層提升試劑環(huán)境適應性。
分布式算力:端側部署輕量化模型(如非Transformer架構),算力需求降低70%,響應延遲壓縮至50ms內(nèi)。
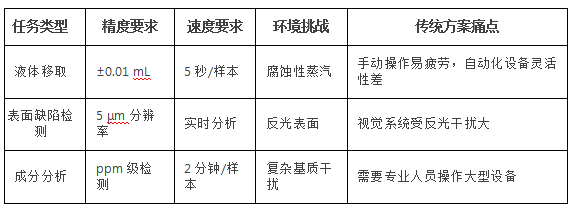
三、典型場景技術適配案例
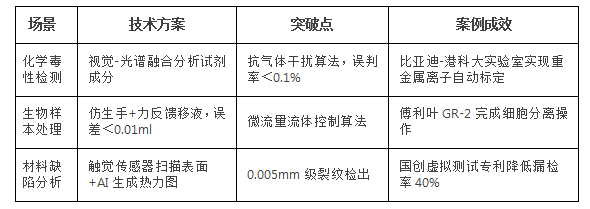
表:檢驗檢測實驗室典型操作任務的技術要求對比
四、生態(tài)與政策助推方向
1. 測評標準建設
依托“具身智能測評實驗室聯(lián)合體”,制定實驗室場景測試規(guī)范(如操作精度、生化安全等級),推動認證標識跨平臺互認。
2.數(shù)據(jù)共享機制
共建開源數(shù)據(jù)集,匯集百萬級實驗室操作數(shù)據(jù),解決訓練樣本匱乏問題。
3.算力與政策支持
利用地方政府補貼降低模型訓練成本,開放核電、醫(yī)療等高風險實驗室場景加速驗證。
綜上,具身智能機器人在檢驗檢測實驗室應用的突破關鍵在于“感知精細化→操作擬人化→決策因果化”。此路徑短期可聚焦靈巧操作與大模型微調(diào),中期需構建實驗室物理常識庫,通過產(chǎn)學研協(xié)同打通技術-應用閉環(huán)。
據(jù)悉,國內(nèi)檢驗檢測信息化管理軟件頭部企業(yè)北京三維天地科技股份有限公司與具身智能機器人領域領軍企業(yè)北京人形機器人創(chuàng)新中心有限公司,正在就聯(lián)合打造檢驗檢測實驗室專用具身智能機器人集群展開研究論證,相信通過多方合作、上下游協(xié)同,具身智能機器人在檢驗檢測行業(yè)的技術瓶頸即將突破,產(chǎn)業(yè)化落地也即將實現(xiàn)。
-
機器人
+關注
關注
213文章
31183瀏覽量
222927 -
實驗室
+關注
關注
0文章
320瀏覽量
20615 -
檢測
+關注
關注
5文章
4871瀏覽量
94215
發(fā)布評論請先 登錄
破解柔性生產(chǎn)難題:知識驅動具身智能工業(yè)機器人的實戰(zhàn)應用指南

具身智能交流會
從“機械臂”到“智能體”:人形機器人在工廠的應用如何開啟具身智能革命
【前瞻技術布局】咖啡機器人:具身智能技術首階段探索與實踐

經(jīng)世智能復合機器人,助力實驗室檢測樣本上下料,提升實驗效率

混凝土檢測實驗室:經(jīng)世智能復合機器人,助力水泥試塊上下料

【「AI芯片:科技探索與AGI愿景」閱讀體驗】+具身智能芯片
2025世界機器人大會亮點:ADI探討具身智能產(chǎn)業(yè)化應用技術挑戰(zhàn)

復合機器人在實驗室物料轉運場景的應用價值:低成本,高精度,高柔性

比亞迪與香港科技大學成立具身智能實驗室
瑞可達榮獲具身智能機器人技術先鋒獎
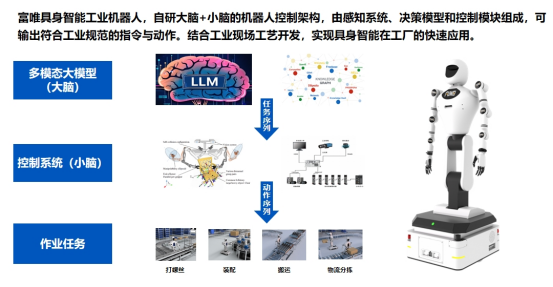
工業(yè)機器人的未來發(fā)展方向:富唯智能以具身智能重構人機協(xié)作新范式
佛山智能裝備院與華數(shù)機器人在具身智能工業(yè)機器人領域的研究成果




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論