 TB67H450FNG 是一款使用 PWM 恒流控制 的 雙極步進電機 驅動器
TB67H450FNG 是一款使用 PWM 恒流控制 的 雙極步進電機 驅動器

1. 控制信號部分
所有控制信號輸入端(IN1, IN2, nENABLE, MDODE)內部都有 Schmitt Trigger,對噪聲不敏感。
3. PCB 布局重要建議
4 基本工作流程(如何驅動)
高電壓、大電流:最大額定值 50V / 4.5A(峰值)。
低導通電阻:高側 + 低側 MOS FET 總阻值僅 0.25Ω(典型值),發熱小,效率高。
多種衰減模式:支持混合衰減和慢衰減,電機運行更平穩,噪聲更小。
內置保護電路:包括過流保護(OCP)、過熱保護(TSD)、以及欠壓鎖定(UVLO)。
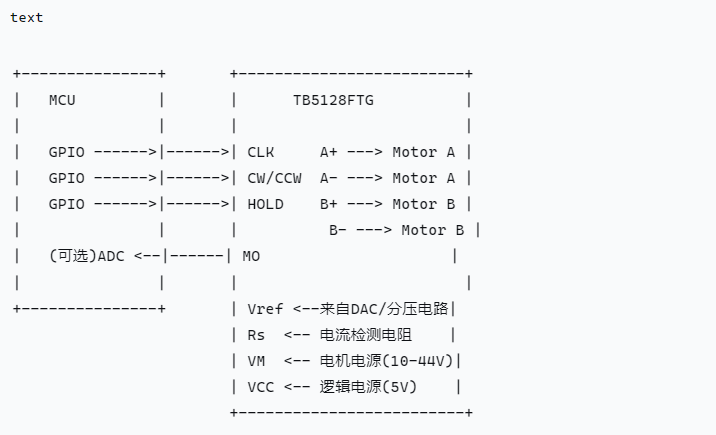
1. 典型應用電路框圖
一個完整的 TB67H450FNG 應用電路主要由三部分組成:電源部分、控制信號部分和電機驅動部分。
2. 詳細電路原理圖及元件說明
以下是圍繞 TB67H450FNG 搭建的詳細應用電路圖及每個部分的關鍵元件說明。
核心電路原理圖
graph TD
subgraph Power Supply
VM_PWR[VM Power Supply 12-44V] --> VM
GND_PWR[GND] --> GND
end
subgraph MCU / Controller
MCU_3V3[3.3V/5V MCU] --> VDD
MCU_GND[MCU GND] --> SGND
MCU_IN1[GPIO IN1] --> IN1
MCU_IN2[GPIO IN2] --> IN2
MCU_nEN[GPIO nENABLE] --> nENABLE
end
subgraph TB67H450FNG
VM --> IC[VM Pin]
VDD --> IC[VDD Pin]
GND --> IC[GND Pin]
SGND --> IC[SGND Pin]
IN1 --> IC[IN1 Pin]
IN2 --> IC[IN2 Pin]
nENABLE --> IC[nENABLE Pin]
subgraph Current Reference
POT[Potentiometer] --> VREF[VREF Pin]
end
subgraph Decay Mode
MDODE_SEL[MDODE Selection] --> MDODE[MDODE Pin]
end
subgraph Outputs
IC -- OUT1A --> MOTOR_A1[Motor A+]
IC -- OUT2A --> MOTOR_A2[Motor A-]
IC -- OUT1B --> MOTOR_B1[Motor B+]
IC -- OUT2B --> MOTOR_B2[Motor B-]
end
end
subgraph Motor
MOTOR_A1 --> COIL_A[Coil A]
MOTOR_A2 --> COIL_A
MOTOR_B1 --> COIL_B[Coil B]
MOTOR_B2 --> COIL_B
end
subgraph Protection & Filtering
C_VM_Bulk[100uF Electrolytic] -- VM to GND
C_VM_Ceramic[0.1uF Ceramic] -- VM to GND
C_VDD[0.1uF Ceramic] -- VDD to SGND
end
(請根據此邏輯圖繪制實際電路連接)
關鍵元件功能詳解
1. 電源部分
VM(電機電源): 這是驅動電機線圈的主電源。電壓范圍建議在 12V 到 44V 之間,具體取決于你的電機額定電壓和所需轉速。電流能力需要滿足電機需求。
C1(大容量電解電容): 靠近芯片的 VM 和 GND 引腳放置一個 100μF 或更大的電解電容,用于平滑電源電壓,吸收電機啟停和反向時產生的大電流沖擊。
C2, C3(高頻去耦電容): 靠近芯片的 VM 和 GND 引腳放置一個 0.1μF 和一個 1μF 的陶瓷電容,用于濾除高頻噪聲,為芯片內部電路提供清潔的電源。
VDD(邏輯電源): 為芯片內部的邏輯電路(如輸入信號處理)供電。通常接 3.3V 或 5V。此電壓必須與你的MCU(如Arduino, STM32)的邏輯電平匹配。
C4(去耦電容): 靠近芯片的 VDD 和 SGND 引腳放置一個 0.1μF 的陶瓷電容。
IN1 和 IN2(線圈 A 的輸入信號): 這兩個引腳的邏輯電平組合決定線圈 A 的電流方向(即步進電機的步進模式)。
IN1=H, IN2=L -> 電流從 A+ 流向 A-
IN1=L, IN2=H -> 電流從 A- 流向 A+
IN1=L, IN2=L -> 快速衰減(剎車)模式
IN1=H, IN2=H -> 高阻抗狀態(電機自由停止)
nENABLE(使能引腳,低電平有效): 當此引腳為低電平時,芯片正常工作。當為高電平時,所有輸出MOSFET關閉,電機處于自由狀態(無保持扭矩)。通常可以將其直接連接到MCU的GND以保持常使能。
VREF(電流參考電壓): 這是最關鍵的引腳之一,用于設定輸出給電機的最大電流值(I_{max})。計算公式為:
(Ω))Imax?(A)=VREF?(V)/(8×RNF?(Ω)) 其中 RNF? 是電流檢測電阻(見下文)。通常使用一個電位器分壓來產生 VREF,以便靈活調整電流。
MDODE(衰減模式選擇):
接 SGND(低電平): 選擇 混合衰減模式。這是最常用的模式,能減少電機振動和噪聲,運行更平穩。
接 VDD(高電平): 選擇 慢衰減模式。
OUT1A, OUT2A: 連接至步進電機 A 相線圈 的兩端。
OUT1B, OUT2B: 連接至步進電機 B 相線圈 的兩端。
電流路徑最短: 大電流路徑(VM -> 芯片輸出 -> 電機線圈 -> 檢測電阻 -> GND)的走線應盡可能短而寬,以減少寄生電感和電阻,降低電壓損失和噪聲。
去耦電容就近放置: C2, C3, C4 必須緊靠芯片的相應引腳放置。
檢測電阻的走線: 連接到檢測電阻 R_{NF} 兩端的采樣走線(到芯片的 NFA1, NFA2, NFB1, NFB2 引腳)應直接從電阻焊盤引出,并盡量靠近芯片。這些是敏感的信號線,應遠離大電流和開關噪聲源。
散熱考慮: TB67H450FNG 采用 HZIP25-P-1.27 封裝,底部有一個大的散熱焊盤。必須將這個散熱焊盤焊接在PCB板上,并通過多個過孔連接到底層的大面積銅皮(GND)上,以幫助散熱。
硬件連接: 按上述原理圖連接好電路。
設置電流: 通過調整 VREF 的電壓,根據公式設定你電機所需的額定電流。例如,如果你的電機額定電流為 1A,使用 0.22Ω 的檢測電阻,
選擇衰減模式: 通常將 MDODE 接地,選擇混合衰減模式。
使能芯片: 將 nENABLE 拉低。
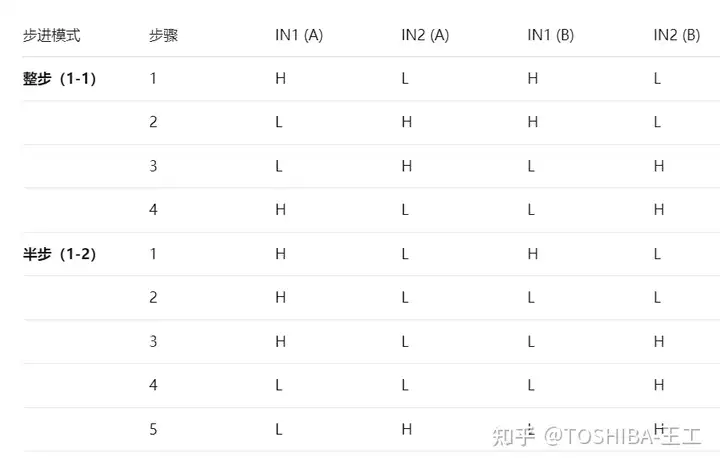
發送脈沖序列: 通過 MCU 控制 IN1 和 IN2 的時序,即可驅動電機。常見的步進模式(如整步、半步、1/4細分等)都是通過特定的 IN1/IN2 時序組合實現的。
R_{NFA1}, R_{NFB1}(電流檢測電阻): 這兩個電阻串聯在輸出驅動管和地之間,用于檢測電機電流。芯片通過測量電阻兩端的電壓來實施PWM恒流控制。電阻值的選擇至關重要:
阻值: 通常選用 0.1Ω 到 0.5Ω 之間的低阻值、高功率精度電阻。
功率: 電阻的功率必須足夠大。例如,電機相電流為 1.5A,電阻為 0.22Ω,則每個電阻的功耗為 1.52×0.22≈0.5 1.52×0.22≈0.5W。因此,至少應選擇 1W 或 2W 的電阻以確保安全。
?編輯這份詳細的說明能幫助你成功設計和應用 TB67H450FNG 電機驅動電路僅供參考。在實際制作時,務必參考官方的 TB67H450FNG 數據手冊 以獲取最權威的參數和布局指南或官方技術支持wdylsq
?審核編輯 黃宇
-
驅動器
+關注
關注
54文章
9082瀏覽量
155494 -
PWM
+關注
關注
116文章
5869瀏覽量
225600 -
步進電機
+關注
關注
153文章
3248瀏覽量
152348 -
恒流控制
+關注
關注
0文章
80瀏覽量
20675
發布評論請先 登錄
DRV8846雙H橋步進電機驅動器:特性、應用與設計要點解析
DRV8704:高性能雙H橋PWM柵極驅動器的設計與應用
探索 DRV8436E/P 雙 H 橋電機驅動器:特性、應用與設計要點
深度剖析DRV8411A雙H橋電機驅動器:特性、應用與設計要點
?DRV8821 雙路步進電機控制器與驅動器技術文檔總結
?DRV8843 雙H橋電機驅動器技術文檔總結
?DRV8846 雙H橋步進電機驅動器技術文檔總結
?DRV8849 雙路步進電機驅動器技術手冊總結
?DRV8421 18V 2A雙H橋步進電機驅動器技術文檔總結
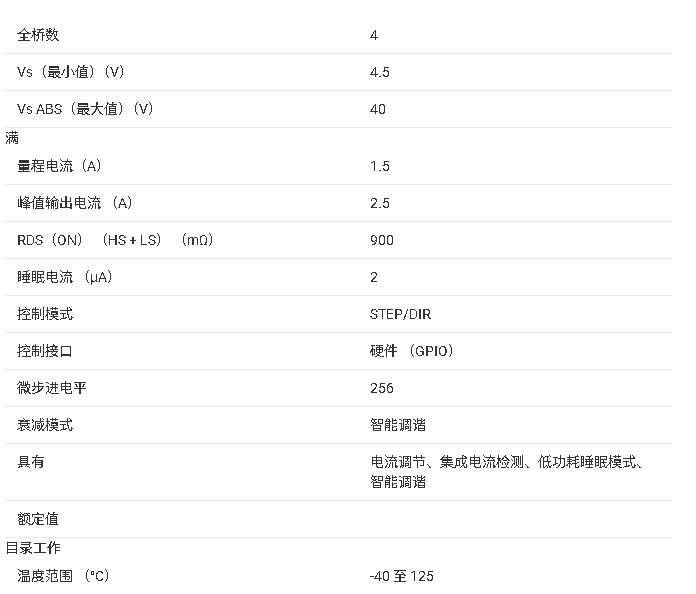
東芝的 TB5128FTG 這款步進電機驅動芯片。它是一款非常經典且性能強大的雙極步進電機驅動器
聊聊東芝TB67S109AFTG芯片在釣魚設備上的應用體驗
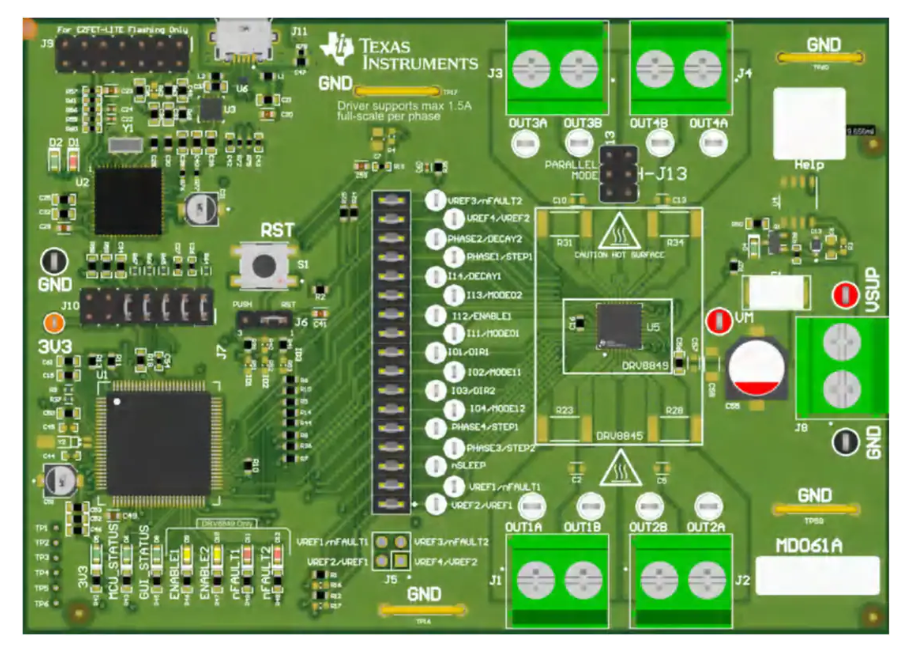
DRV8849EVM雙路步進電機驅動器評估模塊技術解析
一款工作電壓為2.7V至15V、負載電流1.0A的雙H橋電機驅動芯片-SS8833T

TB67S109AFTG, TB67S109AFNG是一款采用PWM斬波器的兩相雙極步進電機驅動器內置有時鐘輸入解碼器。采用BiCD工藝制造



 工商網監
工商網監
評論