") 使用總線型驅(qū)動(dòng)器時(shí),電機(jī)不動(dòng)問題處理
使用總線型驅(qū)動(dòng)器時(shí),電機(jī)不動(dòng)問題處理

在使用總線型驅(qū)動(dòng)器控制電機(jī)時(shí),遇到電機(jī)不動(dòng)作的問題可能由多種因素引起。本文將系統(tǒng)地分析可能的原因,并提供詳細(xì)的排查步驟和解決方案,幫助工程師快速定位并解決問題。
一、電源與接線檢查
1. 電源供電檢查
●首先確認(rèn)驅(qū)動(dòng)器電源輸入電壓是否符合規(guī)格要求(通常為24V/48V DC或交流輸入)。使用萬用表測(cè)量電源端子電壓,確保在允許波動(dòng)范圍內(nèi)(±10%)。
●檢查電源容量是否足夠,特別是多軸系統(tǒng)需計(jì)算總功耗。例如,某案例中因使用功率不足的開關(guān)電源,導(dǎo)致多軸同時(shí)啟動(dòng)時(shí)電壓驟降,電機(jī)無法正常運(yùn)轉(zhuǎn)。
2. 總線連接狀態(tài)
●檢查CANopen/EtherCAT等總線物理連接,確認(rèn)終端電阻配置正確(如CAN總線需在兩端配置120Ω終端電阻)。
●使用示波器檢測(cè)總線信號(hào)質(zhì)量,觀察是否存在信號(hào)反射或干擾。某紡織設(shè)備案例顯示,未加終端電阻導(dǎo)致信號(hào)振鈴,使通訊丟包率達(dá)15%。
3. 電機(jī)接線檢測(cè)
●使用通斷測(cè)試驗(yàn)證電機(jī)三相線(U/V/W)與驅(qū)動(dòng)器輸出端連接正確,接地線電阻應(yīng)小于0.1Ω。
●檢查編碼器接線,特別是差分信號(hào)線(A+/A-, B+/B-)的屏蔽層處理。某工業(yè)機(jī)器人案例中,因編碼器線纜屏蔽層未接地,導(dǎo)致位置反饋異常。
二、參數(shù)配置診斷
1. 基本參數(shù)驗(yàn)證
●核對(duì)電機(jī)型號(hào)參數(shù)(額定電流、極對(duì)數(shù)等)是否與驅(qū)動(dòng)器配置匹配。某案例顯示,將4極電機(jī)誤設(shè)為2極參數(shù)導(dǎo)致轉(zhuǎn)矩輸出不足。
●檢查控制模式設(shè)置(位置/速度/轉(zhuǎn)矩模式),確認(rèn)與上位機(jī)指令類型一致。
2. 總線通訊配置
●驗(yàn)證節(jié)點(diǎn)ID設(shè)置是否沖突,PDO/SDO映射是否正確。某自動(dòng)化產(chǎn)線因兩個(gè)驅(qū)動(dòng)器節(jié)點(diǎn)ID重復(fù),導(dǎo)致控制指令無法送達(dá)。
●檢查同步周期設(shè)置,EtherCAT典型值為1-4ms,周期過長會(huì)導(dǎo)致運(yùn)動(dòng)控制延遲。
3. 安全參數(shù)檢查
●確認(rèn)使能信號(hào)(Enable)狀態(tài),測(cè)量數(shù)字輸入端口電壓(通常24V為有效)。
●檢查驅(qū)動(dòng)器報(bào)警狀態(tài),通過狀態(tài)字(Status Word)解析具體錯(cuò)誤代碼。常見如過流(Error 0x3210)、超溫(Error 0x3220)等。
三、運(yùn)動(dòng)控制調(diào)試
1. 指令有效性驗(yàn)證
●使用示波器捕捉運(yùn)動(dòng)指令波形,確認(rèn)上位機(jī)發(fā)出的位置/速度指令幅值足夠。某CNC案例中,因指令倍率參數(shù)誤設(shè)為0.1%,導(dǎo)致微米級(jí)移動(dòng)不可見。
●檢查指令單位換算,特別是電子齒輪比(分子/分母)設(shè)置。某貼片機(jī)因?qū)?1,導(dǎo)致指令被放大100倍觸發(fā)軟件限位。
2. 動(dòng)態(tài)響應(yīng)調(diào)整
●逐步提高速度環(huán)增益(Kv)測(cè)試,觀察是否因剛性不足導(dǎo)致失步。建議每次調(diào)整幅度不超過20%。
●檢查加速度參數(shù),過大的加速度設(shè)定可能導(dǎo)致過載保護(hù)。某搬運(yùn)機(jī)器人案例顯示,0.5m/s2的加速度設(shè)定可使3kW電機(jī)達(dá)到峰值電流。
3. 反饋系統(tǒng)驗(yàn)證
●執(zhí)行編碼器零位校準(zhǔn),通過驅(qū)動(dòng)器提供的homing功能自動(dòng)完成。
●對(duì)比指令位置與反饋位置曲線,正常運(yùn)行時(shí)偏差應(yīng)小于5個(gè)脈沖。某案例中因編碼器信號(hào)受干擾,位置偏差持續(xù)超過200脈沖。
四、典型故障案例分析
1. 通訊中斷故障
●現(xiàn)象:驅(qū)動(dòng)器狀態(tài)燈閃爍,上位機(jī)顯示"Node not responding"。
●處理:使用CANalyzer檢測(cè)總線負(fù)載率,超過70%需優(yōu)化通訊周期。某包裝線通過將1ms周期調(diào)整為2ms,負(fù)載率從85%降至40%。
2. 使能回路故障
●現(xiàn)象:驅(qū)動(dòng)器Ready但電機(jī)無扭矩輸出。
●排查:檢查安全回路(STO)接線,測(cè)量安全繼電器觸點(diǎn)狀態(tài)。某沖壓設(shè)備因安全門傳感器接觸不良,導(dǎo)致使能回路斷開。
3. 過載保護(hù)觸發(fā)
●現(xiàn)象:運(yùn)行中突然停機(jī),顯示Fault 0x3211(Overload)。
●對(duì)策:使用電流鉗表測(cè)量相電流,確認(rèn)是否機(jī)械卡死。某注塑機(jī)因?qū)к墲櫥蛔悖瑢?dǎo)致電機(jī)電流達(dá)額定值300%。
五、高級(jí)診斷工具應(yīng)用
1. 總線分析儀使用
●通過Wireshark捕獲EtherCAT幀數(shù)據(jù),分析DC同步時(shí)鐘偏差(應(yīng)小于100ns)。
●解析對(duì)象字典(Object Dictionary)訪問記錄,檢查參數(shù)寫入是否成功。
2. 振動(dòng)頻譜分析
●使用加速度傳感器采集電機(jī)振動(dòng)數(shù)據(jù),軸承故障通常在1kHz以上頻段出現(xiàn)特征峰。
●某風(fēng)機(jī)案例顯示,2.8kHz的振動(dòng)峰值預(yù)示軸承磨損,導(dǎo)致驅(qū)動(dòng)器觸發(fā)振動(dòng)保護(hù)。
3. 熱成像檢測(cè)
●紅外熱像儀可發(fā)現(xiàn)接線端子松動(dòng)(表現(xiàn)為局部高溫點(diǎn))。
●某伺服系統(tǒng)因電源端子溫度達(dá)85℃(環(huán)境溫度25℃),接觸電阻增大導(dǎo)致電壓下降。
六、系統(tǒng)集成注意事項(xiàng)
1. 接地系統(tǒng)設(shè)計(jì)
●建議采用星型接地拓?fù)洌拥鼐€徑不小于電源線徑。
●某半導(dǎo)體設(shè)備通過將驅(qū)動(dòng)器接地電阻從3Ω降至0.5Ω,EMC干擾降低12dB。
2. 電纜布線規(guī)范
●動(dòng)力電纜與信號(hào)電纜間距需大于30mm,交叉時(shí)呈90°直角。
●編碼器電纜推薦使用雙絞屏蔽線,屏蔽層360°端接。
3. 固件兼容性
●定期檢查驅(qū)動(dòng)器固件版本,新版本可能修復(fù)運(yùn)動(dòng)控制算法缺陷。
●某案例顯示,升級(jí)固件后解決了S曲線加減速時(shí)的位置超調(diào)問題。
通過以上系統(tǒng)化的排查流程,90%以上的總線型驅(qū)動(dòng)器電機(jī)不動(dòng)作問題可得到有效解決。建議建立標(biāo)準(zhǔn)的調(diào)試檢查表,記錄每次故障現(xiàn)象和處理方法,形成知識(shí)庫供后續(xù)參考。對(duì)于復(fù)雜故障,可聯(lián)系制造商技術(shù)支持,提供完整的診斷數(shù)據(jù)包。
審核編輯 黃宇
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
9082瀏覽量
155498 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9590瀏覽量
154073
發(fā)布評(píng)論請(qǐng)先 登錄
步進(jìn)電機(jī)驅(qū)動(dòng)器的作用介紹

DRV8886AT步進(jìn)電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
探索 DRV8436E/P 雙 H 橋電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
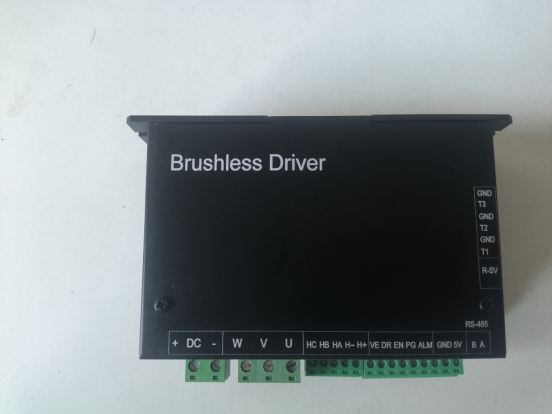
無刷電機(jī)驅(qū)動(dòng)器的基礎(chǔ)知識(shí)

HR4988微特步進(jìn)電機(jī)驅(qū)動(dòng)器:高效便捷的驅(qū)動(dòng)解決方案
?DRV8821 雙路步進(jìn)電機(jī)控制器與驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8823 四橋串行接口電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
TPIC2010 串行接口控制的 9 通道電機(jī)驅(qū)動(dòng)器數(shù)據(jù)手冊(cè)

?TPIC2060A 9通道電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)

?DRV8823-Q1 4橋串行接口電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
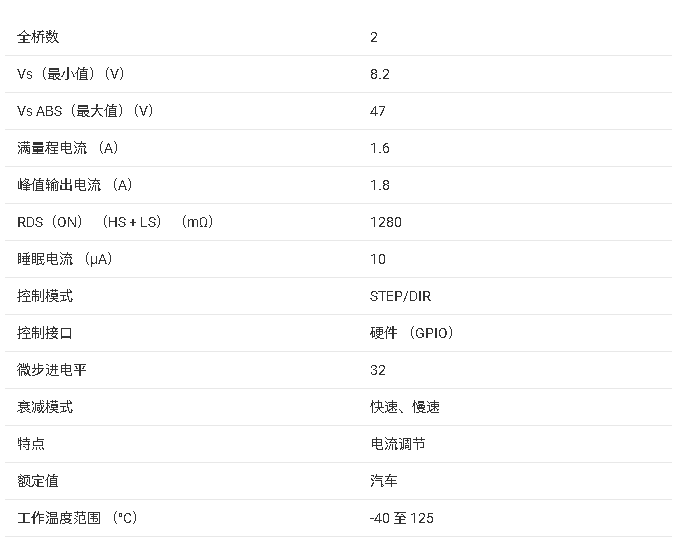
?DRV8824-Q1 汽車級(jí)步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8818A 35V步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
CW32L011 電機(jī)驅(qū)動(dòng)器開發(fā)板測(cè)試
永磁電機(jī)調(diào)速驅(qū)動(dòng)器與伺服驅(qū)動(dòng)器、變頻器有哪些異同?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論