 醫療術野新突破:MODBUS轉CANOPEN網關打造高性能手術機器人通信骨架
醫療術野新突破:MODBUS轉CANOPEN網關打造高性能手術機器人通信骨架

- 項目背景與系統概述
隨著精準醫療需求的不斷提升,手術機器人作為高端醫療設備的代表,正逐步成為復雜外科手術的重要工具。手術機器人的控制系統對實時性、可靠性與精確度要求極高,任何通信延遲或數據錯誤都可能直接影響手術效果與患者安全。傳統MODBUS協議因其簡單易用,在工業領域廣泛應用,但在高實時、多節點、復雜交互的醫療機器人場景中顯得力不從心。因此,將MODBUS設備接入高性能的CANopen網絡,成為提升系統整體通信能力的關鍵技術路徑。
該系統通常由手術控制臺、機械臂、影像設備和監控單元等組成,通過集成MODBUS轉CANopen網關,使得原本基于MODBUS的從站設備(如電機、傳感器等)能夠無縫接入以CANopen為主干的實時控制網絡中,在確保數據一致性的同時,顯著提高響應速度和設備協同能力。

- 通信網絡組成
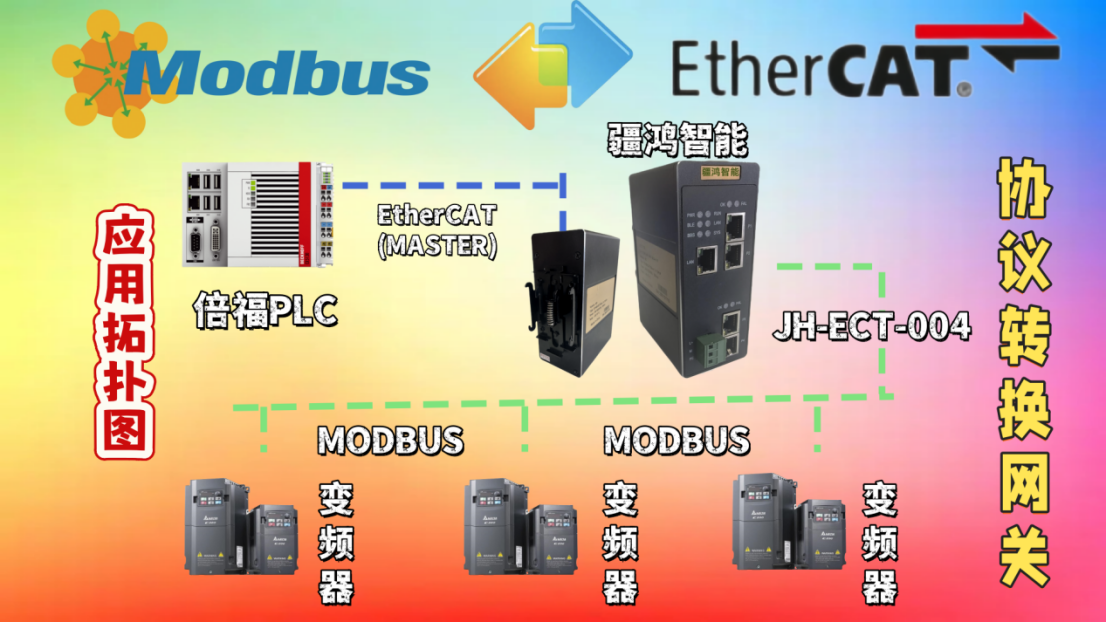
手術機器人的通信網絡呈分層分布式結構。最上層為中央控制單元,通常作為CANopen主站;中間通過協議轉換網關連接下層的MODBUS從設備;底層則包括各類關節電機、光學傳感器、力矩反饋單元等執行與感知設備。
網關在這一架構中處于核心位置,它不僅完成MODBUS RTU/ASCII與CANopen幀格式之間的轉換,還實現了協議間的服務映射,如將MODBUS寄存器映射為CANopen對象字典條目,從而在應用層實現數據互通。此外,網關還具備數據緩存、錯誤隔離和實時日志功能,進一步增強了系統的魯棒性。
- 接口特性:CANopen主站與從站的角色
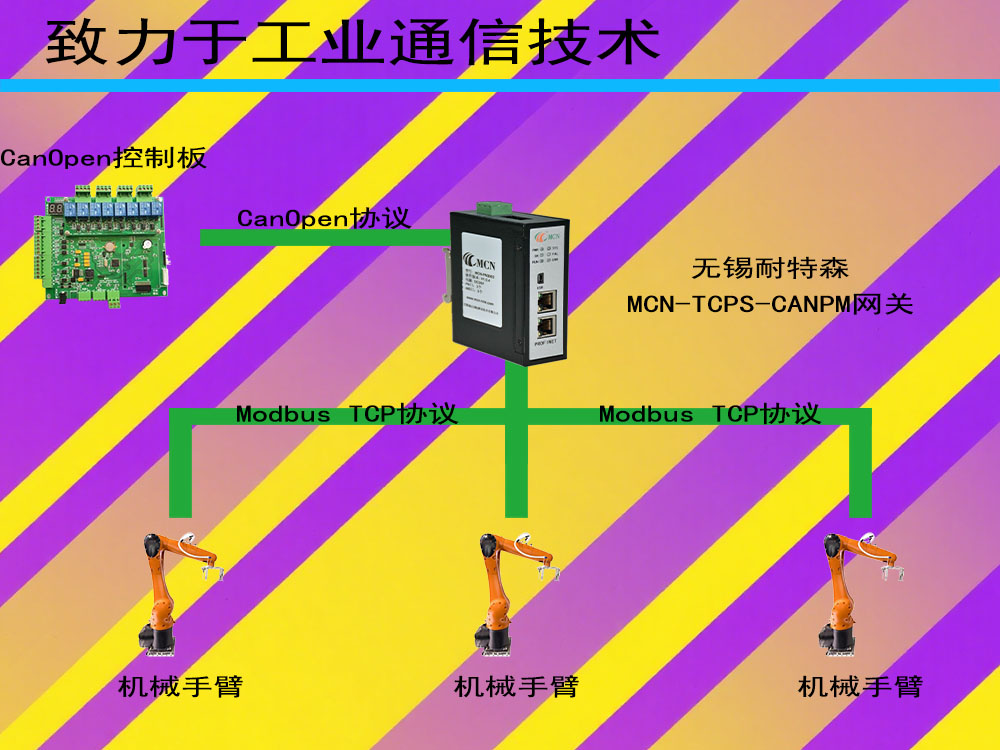
CANopen作為主站時,通常由中央控制器或運動控制卡承擔,負責整個網絡的初始化、配置和周期性的過程數據對象(PDO)通信。主站通過發送同步幀(SYNC)協調各從站設備的數據收發節奏,保障實時控制類數據如目標位置、電機轉矩等能夠以極低的抖動進行傳輸。在手術機器人系統中,主站還需處理緊急事件消息,如某個關節模塊異常,系統需在毫秒級時間內響應并進入安全狀態。
CANopen從站則通常對應具體的執行單元或智能傳感器。它們接收主站發來的控制指令,并實時上傳自身狀態。這些設備通過對象字典實現參數標準化與訪問統一化,支持多種服務數據對象(SDO)進行參數配置與非周期通信,也支持PDO實現高效實時數據交換。而經由網關接入的MODBUS設備,在CANopen網絡中仍以從站身份出現,但其通信內容已被網關翻譯并整合進CANopen通信框架中。
值得注意的是,由于醫療設備對功能安全的嚴格要求,該網絡通常還需支持CANopen的安全擴展協議(CANopen Safety),或通過冗余網關架構進一步提升可靠性。
- 總結
疆鴻智能MODBUS轉CANopen的協議轉換方案,為手術機器人這類高要求醫療設備提供了一條平滑而可靠的技術升級路徑。它既保留了原有MODBUS設備的資產價值,又充分發揮了CANopen在實時性、可靠性和網絡擴展性方面的優勢,使得系統在復雜多節點的醫療場景中仍能實現精密控制與高速協同。未來,隨著通信協議的進一步融合與邊緣網關算力的增強,類似的結構仍將是實現醫療設備系統集成與功能進化的重要支撐,最終為提升手術精準度、保障患者生命安全提供堅實基礎。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31310瀏覽量
223356 -
MODBUS
+關注
關注
28文章
2498瀏覽量
83645 -
網關
+關注
關注
9文章
6898瀏覽量
56503 -
CANopen
+關注
關注
8文章
511瀏覽量
49756
發布評論請先 登錄
EtherNet/IP轉CANopen——焊裝產線的“協議破壁人”:讓機器人聽懂焊機

EtherCAT轉CANopen網關模塊在工業機器人系統中的典型應用案例解析

索尼FCB-EV7520與USB編碼板CM2001U重塑醫療術野攝像新生態
強生醫療科技攜手NVIDIA推進手術機器人開發
集成異構網絡:EtherCAT轉MODBUS機器人通信方案
工業機器人如何通過Modbus TCP轉CanOpen網關高效通信!
MODBUS/CANOPEN網關:樓宇系統互聯,從此無界

研華科技助力真健康穿刺手術機器人亮相
醫療界的“萬能轉換器耐達訊EtherCAT轉RS\\-232“協議互聯的秘密武器
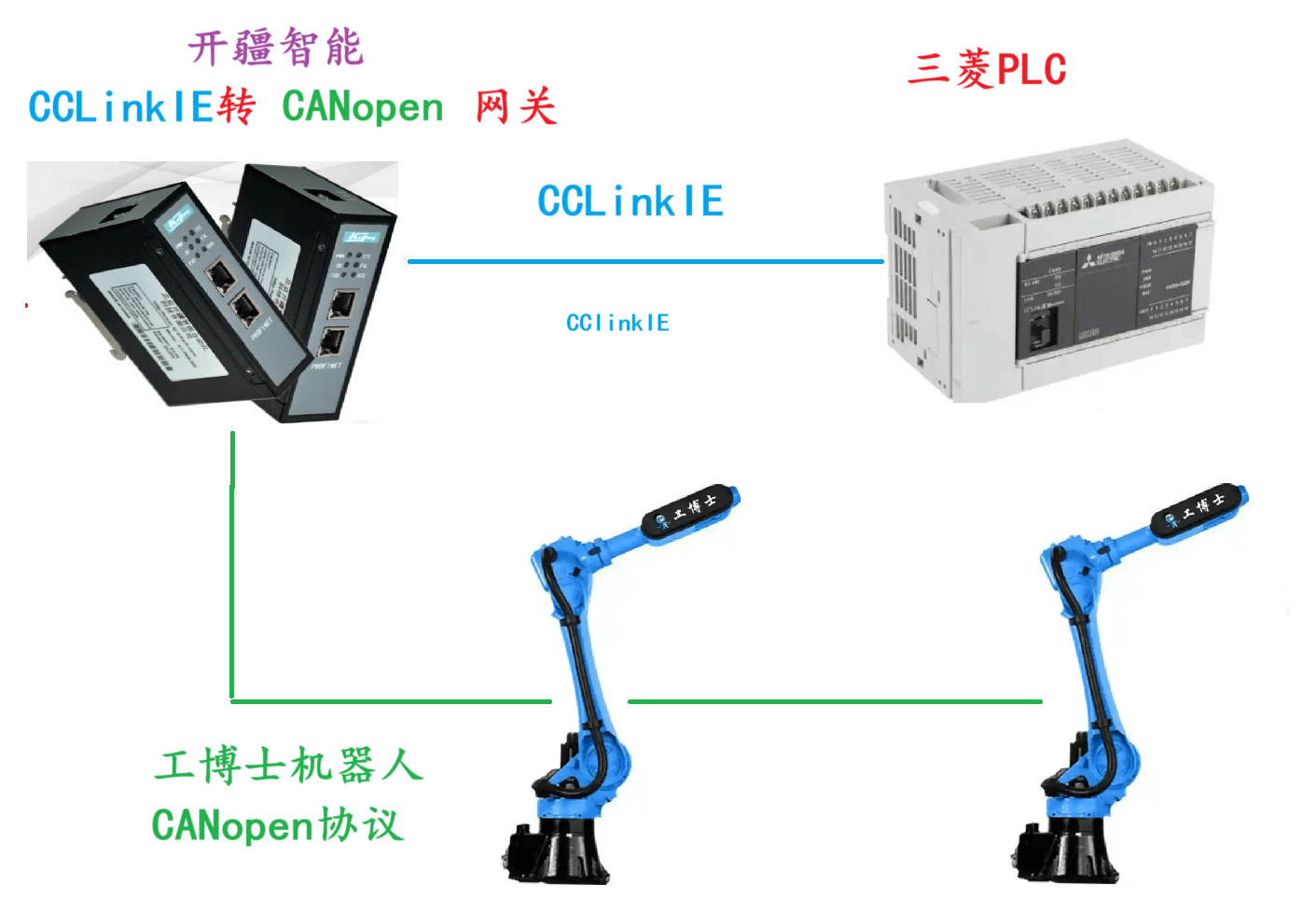
開疆智能CCLinkIE轉CANopen網關連接GBS20機器人配置案例
通信小能手,Modbus TCP轉Profibus DP網關硬控變送器與PLC通訊方案

跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例

開疆智能Canopen轉Profinet網關連接工博士GBS20機器人配置案例



 工商網監
工商網監
評論