") 跨協(xié)議探秘:profinet轉ethernet ip網(wǎng)關搞定川崎機器人與PLC通信
跨協(xié)議探秘:profinet轉ethernet ip網(wǎng)關搞定川崎機器人與PLC通信

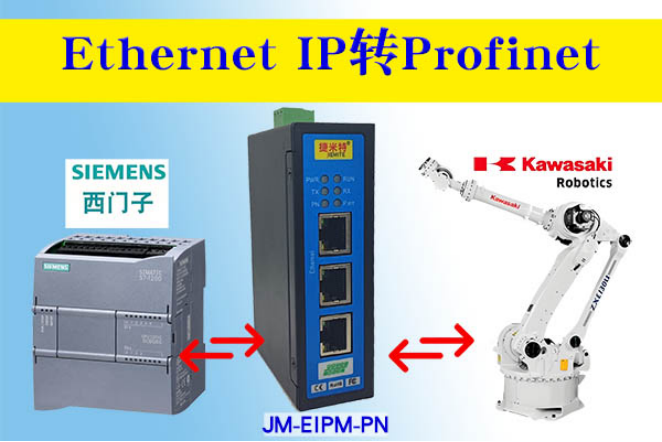
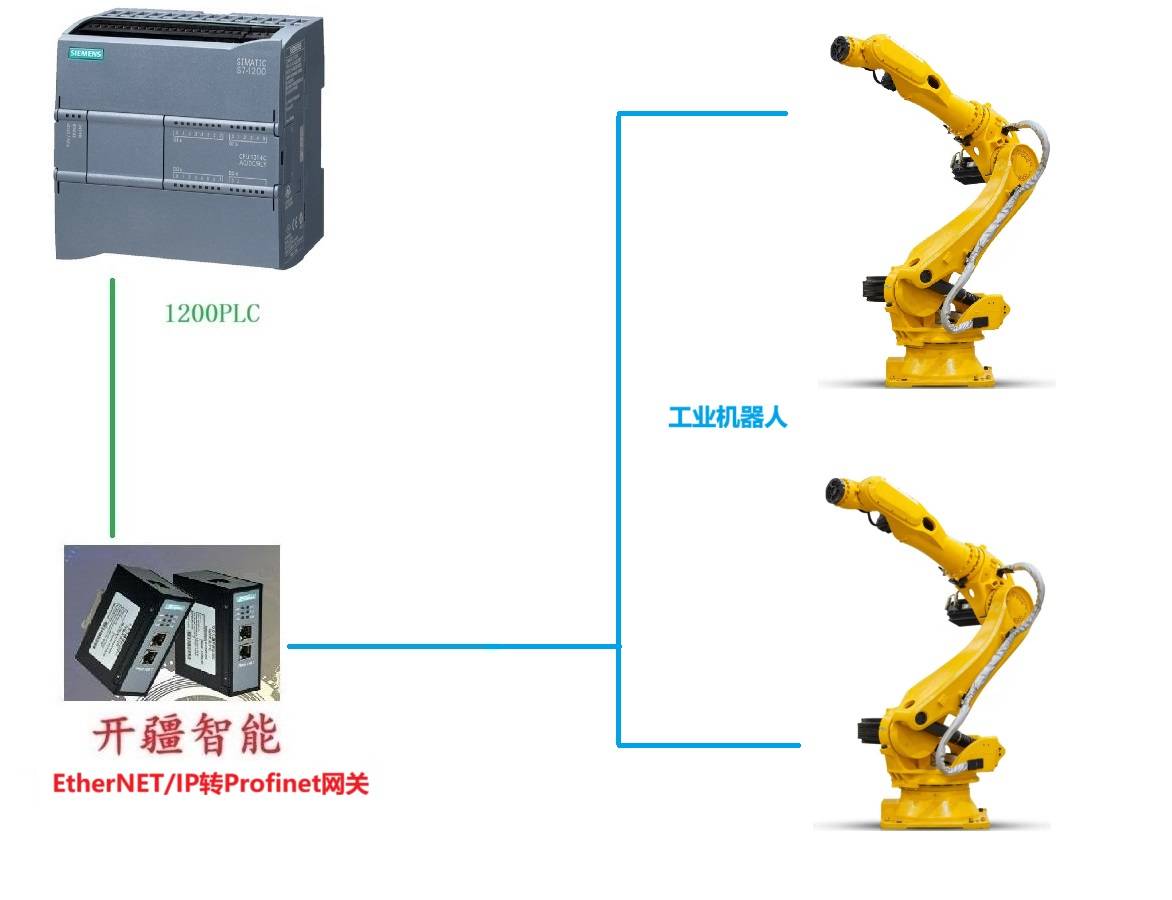
在工業(yè)自動化場景中,不同品牌的設備往往采用不同的通信協(xié)議,例如西門子PLC通常使用 PROFINET ,而川崎機器人則可能采用 Ethernet/IP 。要讓它們實現(xiàn)數(shù)據(jù)交互,通常需要借助profinet轉ethernetip協(xié)議轉換網(wǎng)關,在兩種協(xié)議之間進行實時數(shù)據(jù)轉換。

本方案采用一款支持**PROFINET(從站)和Ethernet/IP(主站)**的雙協(xié)議網(wǎng)關,實現(xiàn)西門子PLC與川崎機器人的無縫通信。該網(wǎng)關能夠:
- 雙向數(shù)據(jù)交換 :PLC和機器人可以互相讀寫數(shù)據(jù)。
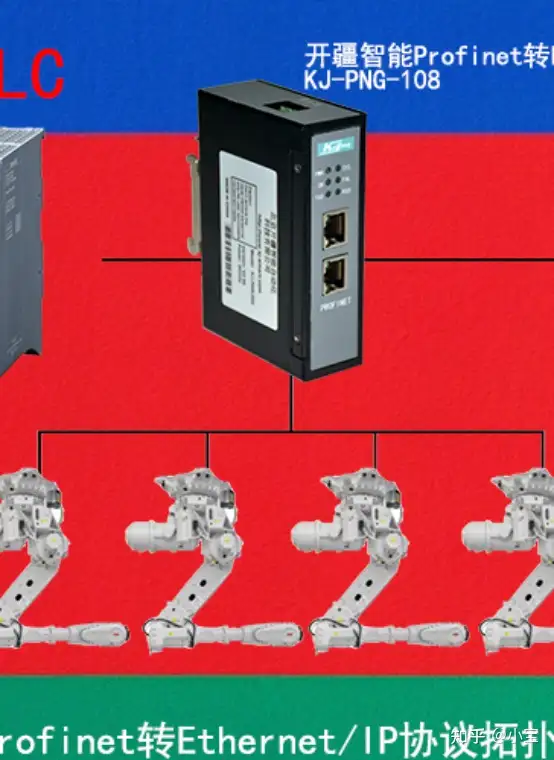
- Ethernet/IP側(連接川崎機器人)可做Ethernet/IP主站(Master)
支持變頻器、伺服驅動器、PLC、機器人等 ,可同時對接4個從站(具體數(shù)量需確認)
- PROFINET設置 :
- 定義網(wǎng)關在PROFINET網(wǎng)絡中的站名和IP。
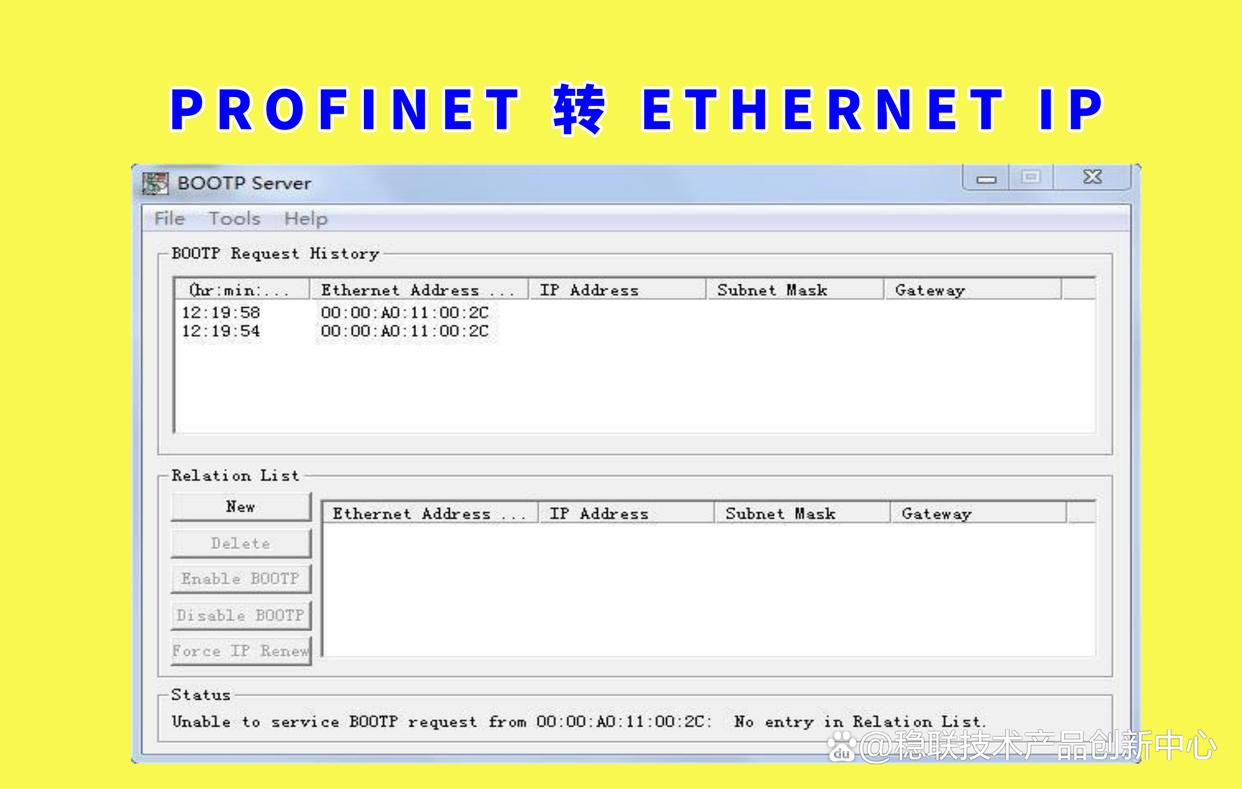
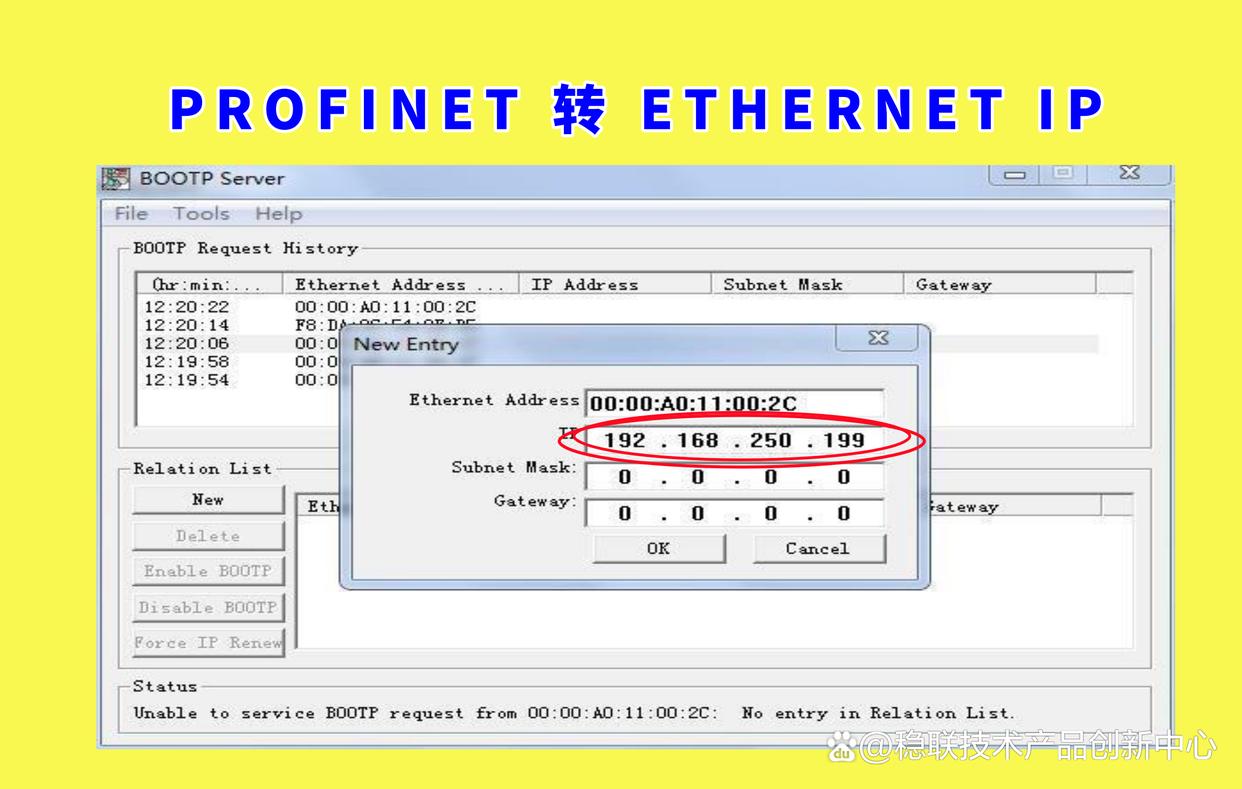
- Ethernet/IP設置 :
- 添加川崎機器人作為從站,設定其IP及通信參數(shù)。
- 配置數(shù)據(jù)交換區(qū)(如輸入/輸出標簽與PLC的對應關系)。
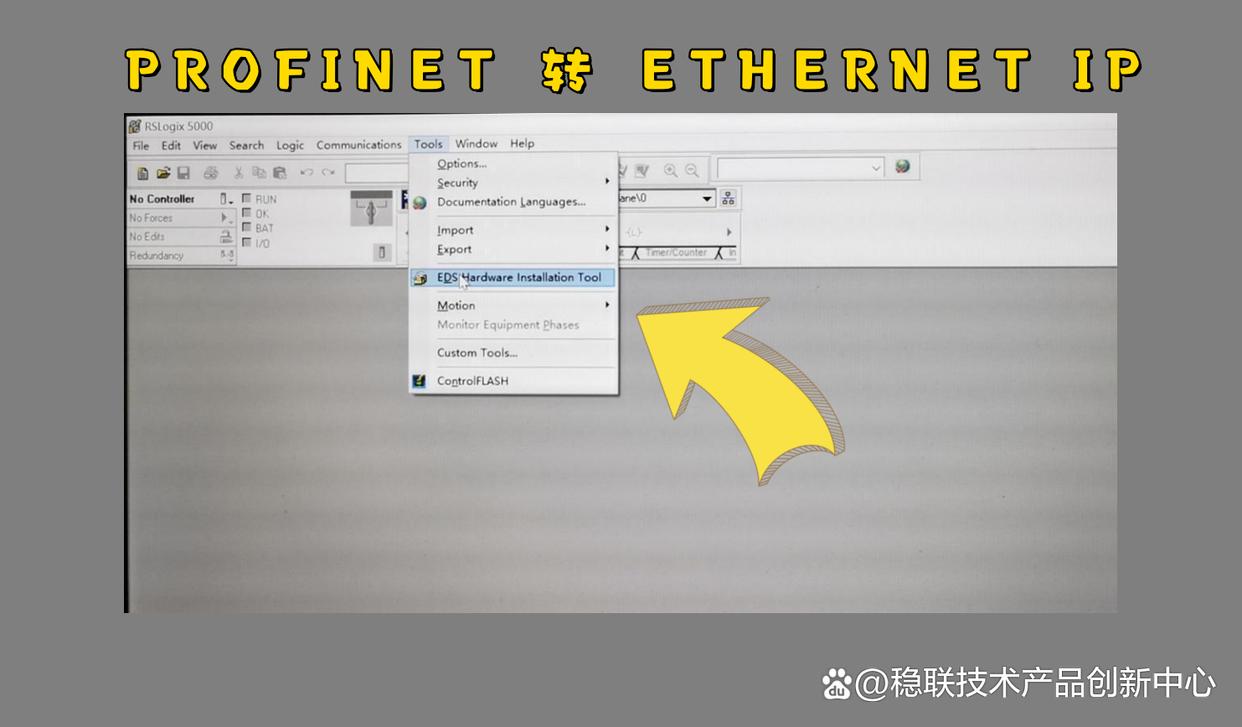
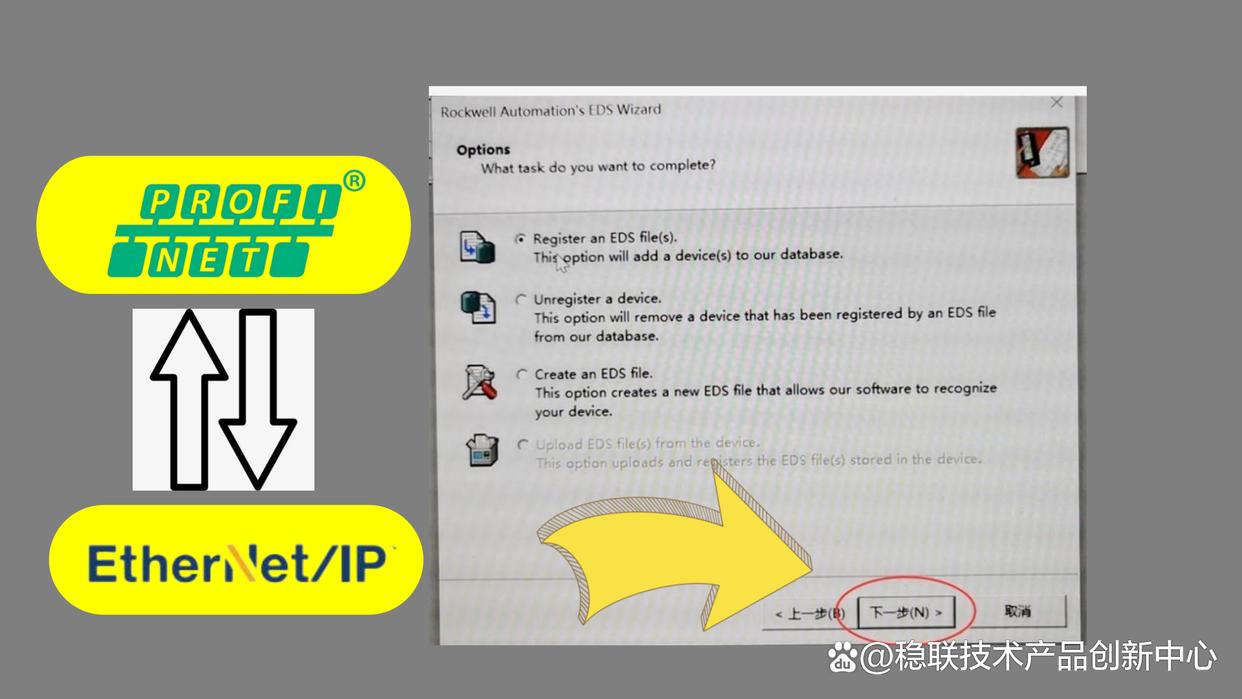
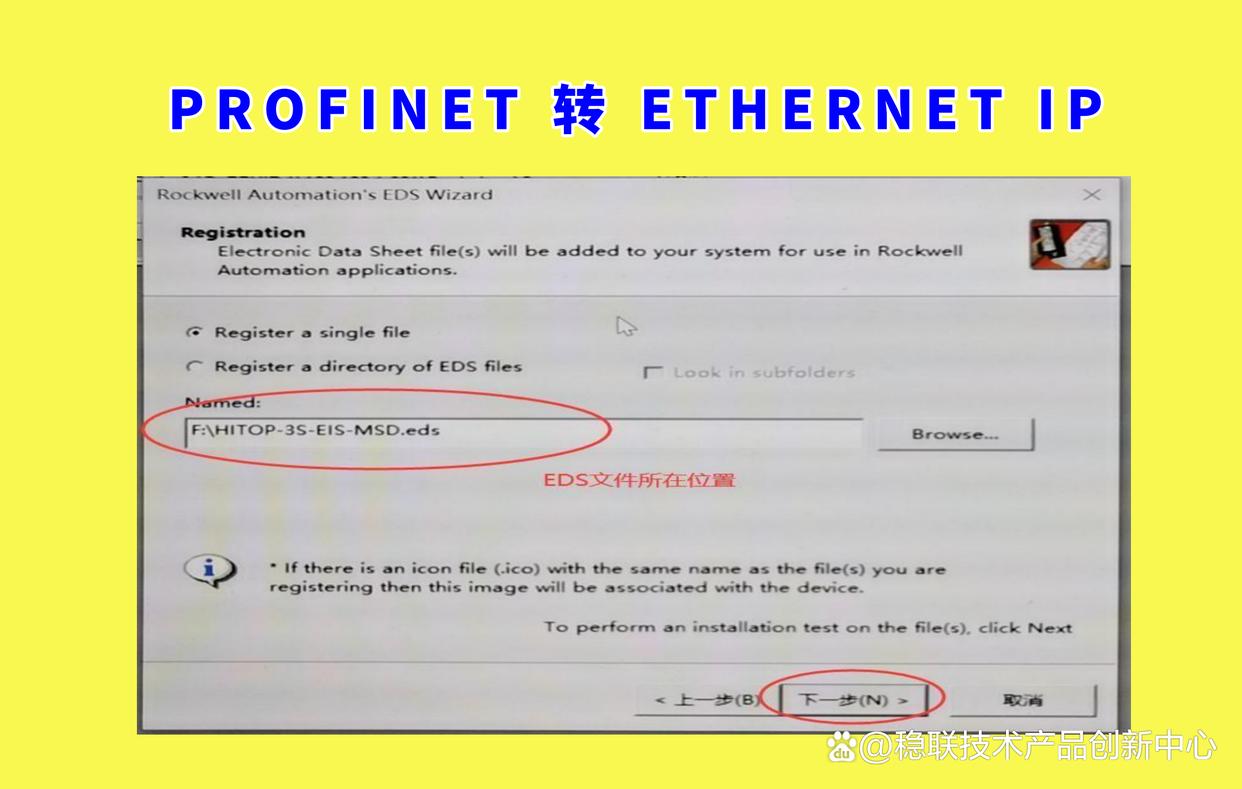
- 生成配置文件 :導出
.dds或其他格式的配置。
- 下載配置 :將文件寫入網(wǎng)關,完成參數(shù)設定。
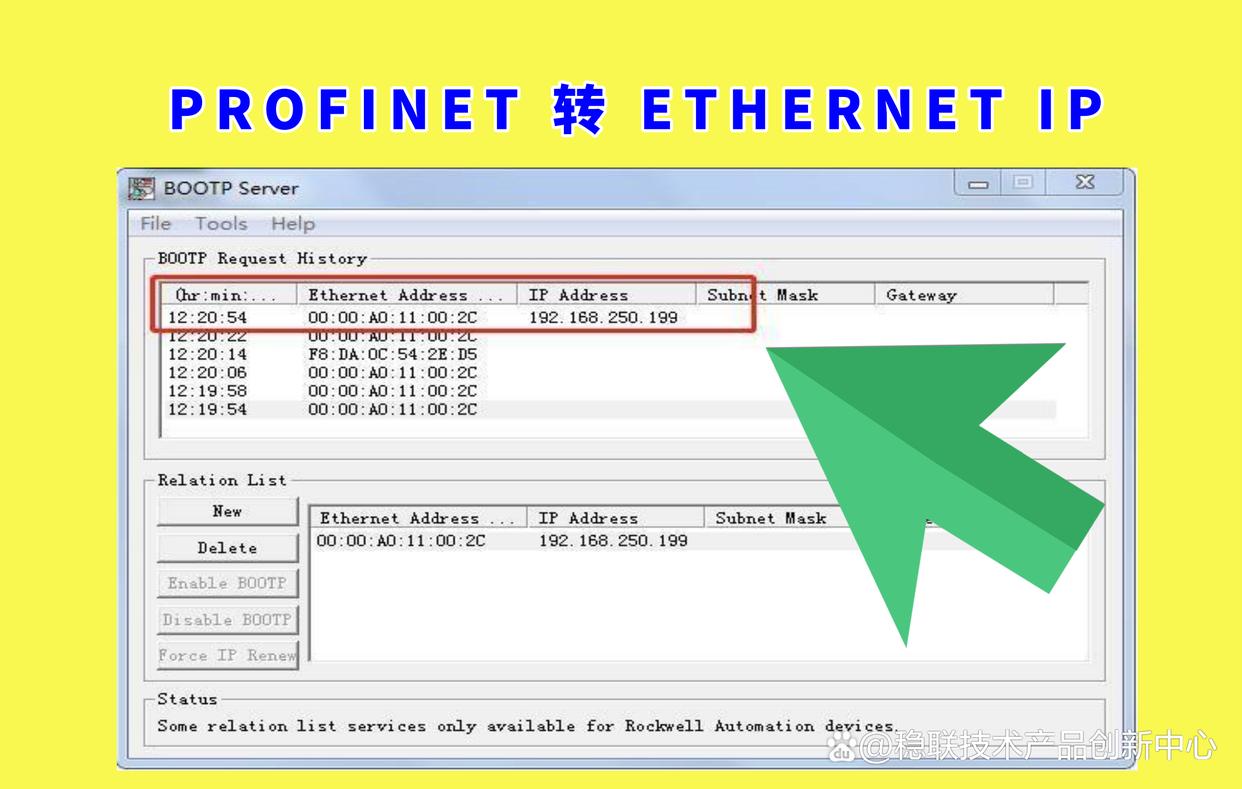
3. 通信驗證
- 上電啟動 :等待約10秒,觀察網(wǎng)關狀態(tài)燈:
- RUN燈亮 :設備運行正常。
- PN/OK燈常亮 :PROFINET和Ethernet/IP通信已建立。
本方案通過協(xié)議轉換網(wǎng)關,高效解決了西門子PLC(PROFINET)與川崎機器人(Ethernet/IP)的跨協(xié)議通信問題。配置簡單、穩(wěn)定性高,適用于各類工業(yè)自動化場景。如需進一步優(yōu)化,可根據(jù)實際需求調整數(shù)據(jù)映射或采用替代通信方案。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31208瀏覽量
222980 -
Profinet
+關注
關注
9文章
2310瀏覽量
28261 -
PLC通信
+關注
關注
1文章
18瀏覽量
9870
發(fā)布評論請先 登錄
相關推薦
熱點推薦
profinet轉ethernet網(wǎng)關連接發(fā)那科機器人配置案例
本案例是西門子1200PLC通過PROFINET轉EtherNet網(wǎng)關連接發(fā)那科搬運機器人配置案

Modbus轉Ethernet IP網(wǎng)關模塊與匯川PLC通訊案例
Modbus轉Ethernet/IP網(wǎng)關模塊(XD-MDEP100)是一種用于將Modbus協(xié)議轉換為E

開疆智能EtherNETIP轉Profinet網(wǎng)關連接匯川PLC配置案例
本方案以匯川H5U PLC為例,驗證測試匯川PLC在EtherNET/IP通訊

Profinet轉Ethernet IP網(wǎng)關在汽車配件生產(chǎn)中的應用
質量檢測、動作控制等操作。
Profinet轉Ethernet IP網(wǎng)關(KJ-PNG-108)鏈接還使得用戶可以在遠程控制
發(fā)表于 03-18 11:29
Profinet轉Modbus TCP網(wǎng)關連接搬運機器人配置案例
本案例是西門子1200PLC通過Profinet轉Modbus TCP網(wǎng)關連接搬運機器人配置案例,所需設備為西門子1200
發(fā)表于 06-07 11:16
profinet轉ethernet網(wǎng)關連接發(fā)那科機器人配置案例
本案例是西門子1200PLC通過PROFINET轉EtherNet網(wǎng)關連接發(fā)那科搬運機器人配置案
發(fā)表于 08-03 17:58
EtherNet/IP轉profienrt協(xié)議網(wǎng)關連接EtherNet/IP協(xié)議的川崎機器人配置方法
EthernetIP 協(xié)議一般用于采集機器人,控制器等設備的數(shù)據(jù)。 下面介紹通過遠創(chuàng)智控YC-EIPM-PN網(wǎng)關把EtherNet/IP

EtherNetIP轉Profinet網(wǎng)關連接發(fā)那科機器人配置實例解析
本案例主要展示了如何通過Ethernet/IP轉Profinet網(wǎng)關實現(xiàn)西門子1200PLC與發(fā)

西門子 PLC 與川崎機器人通訊:Profinet 轉 Ethernet IP 實例解析
要實現(xiàn)從西門子PLC即PROFINET協(xié)議和川崎機器人即Et
開疆智能Profinet轉EthernetIP從網(wǎng)關連接ABB機器人做EtherNet主配置案例
開疆智能Profinet轉Ethernet/IP從網(wǎng)關連接ABB機器人做
Profinet 轉 Ethernet/IP 靠網(wǎng)關模塊實現(xiàn)力士樂數(shù)控系統(tǒng)和安川機器人通信協(xié)議轉換
分享來自于大族激光集團公司使用profinet網(wǎng)關模塊使用案例,現(xiàn)場需求是力士樂數(shù)控系統(tǒng)是profinet協(xié)要與的安川機器人

探尋西門子PLC與川崎機器人利用 Ethernet IP 轉 Profinet網(wǎng)關實現(xiàn)通訊的成功案例
要實現(xiàn)從西門子PLC即PROFINET協(xié)議和川崎機器人即Et

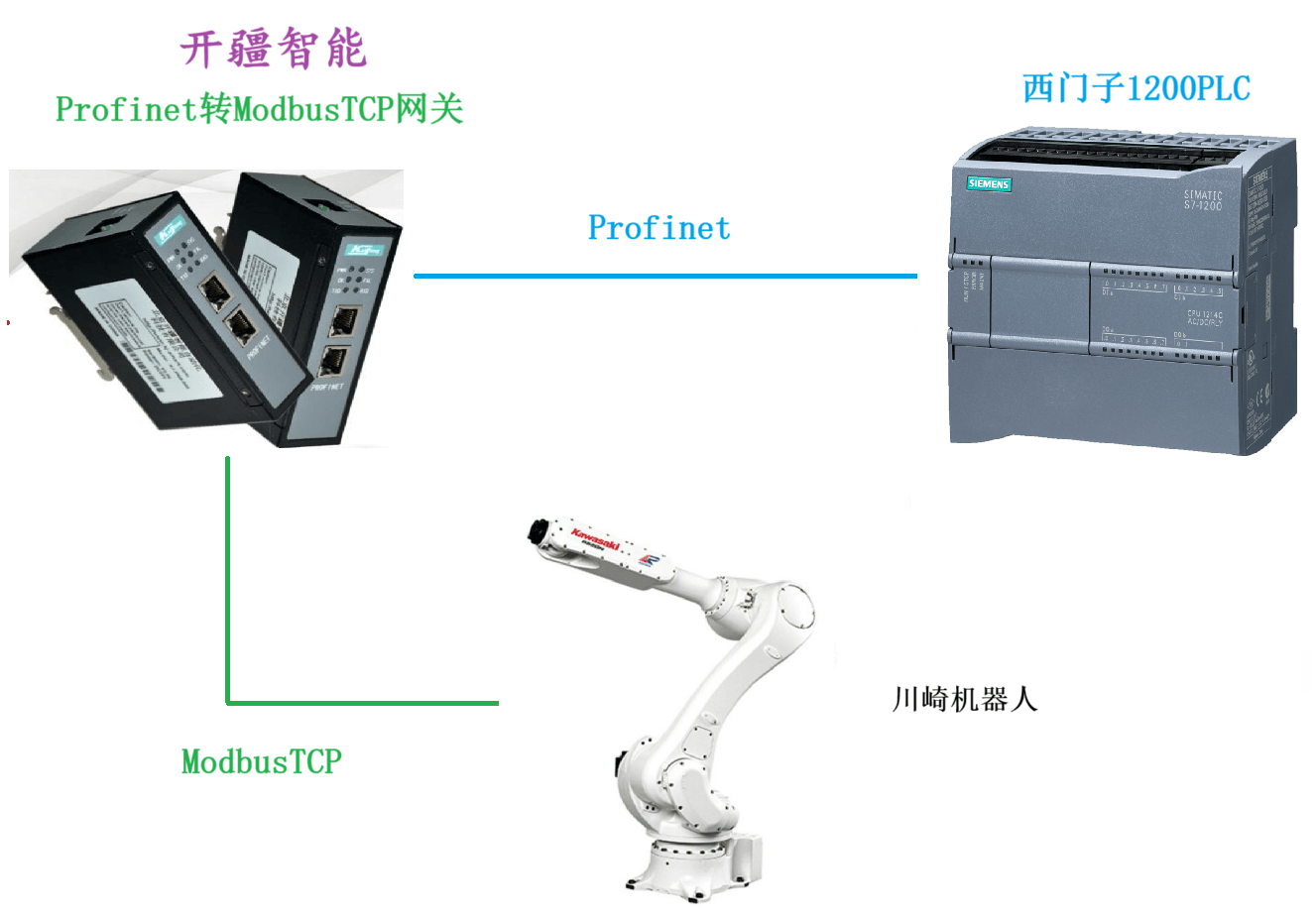
開疆智能ModbusTCP轉Profient網(wǎng)關連接西門子PLC與川崎機器人配置案例
本案例是西門子PLC與川崎機器人通過Profient轉ModbusTCP網(wǎng)關進行通訊轉換的配置案
開疆智能Profinet轉EtherNET/IP網(wǎng)關連接機器人配置案例
本案例是通過網(wǎng)關將EtherNET通訊協(xié)議的機器人接入到西門子Profinet網(wǎng)絡之中,以便于PLC
Profinet轉Ethernet IP網(wǎng)關連接庫卡機器人問答式精簡配置指南
IP從站)”架構,以問答形式精簡配置步驟,穿插注意事項。 一、基礎認知 問:核心連接邏輯及主從關系? 答:通過Profinet轉Ethernet




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論