") GraniStudio:?jiǎn)屋SPTP運(yùn)動(dòng)例程
GraniStudio:?jiǎn)屋SPTP運(yùn)動(dòng)例程

1.文件運(yùn)行
導(dǎo)入工程
雙擊運(yùn)行桌面GraniStudio.exe。

通過(guò)引導(dǎo)界面導(dǎo)入單軸PTP運(yùn)動(dòng)例程,點(diǎn)擊導(dǎo)入按鈕。

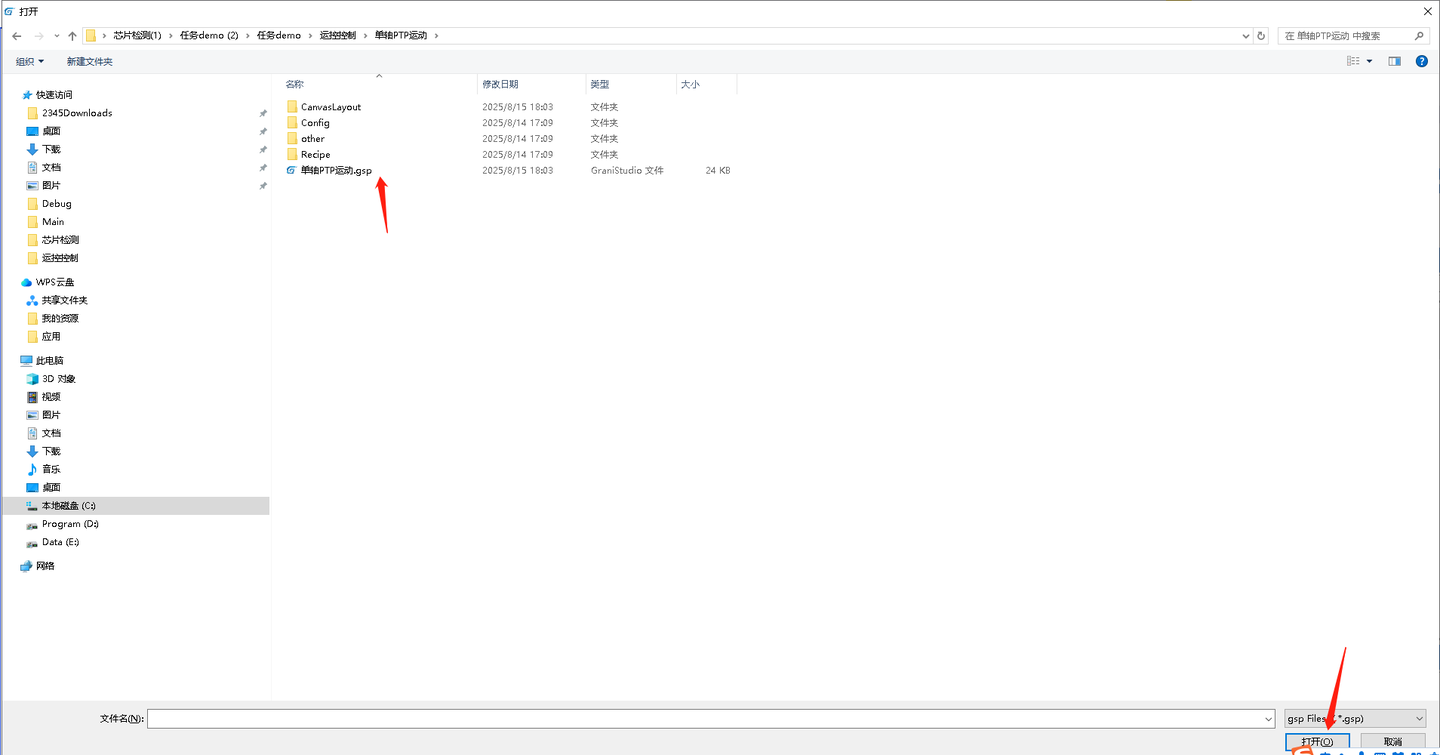
打開(kāi)單軸PTP運(yùn)動(dòng)例程所在路徑,選中單軸PTP運(yùn)動(dòng).gsp文件,點(diǎn)擊打開(kāi),完成導(dǎo)入。
2.功能說(shuō)明
實(shí)現(xiàn)軸1復(fù)位、單軸以相對(duì)運(yùn)動(dòng)模式走10毫米以及絕對(duì)運(yùn)動(dòng)走10毫米。
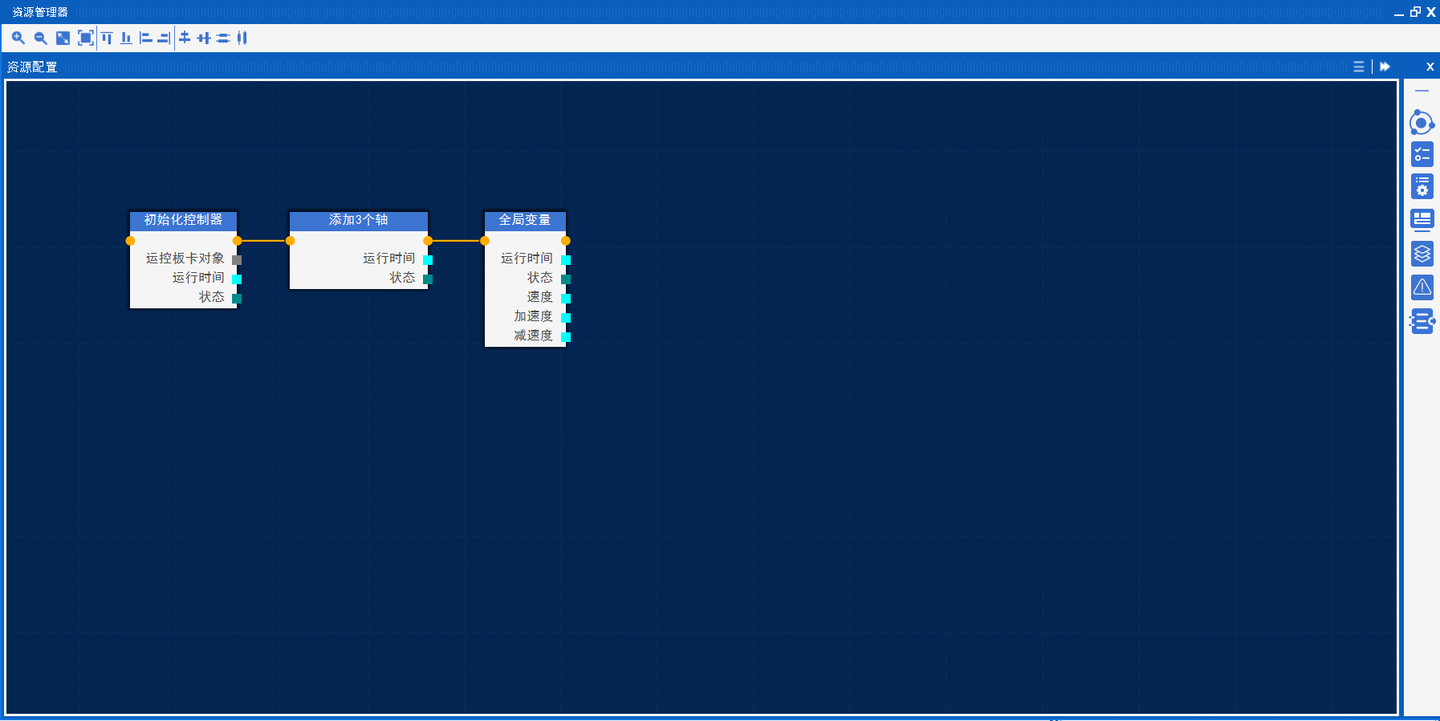
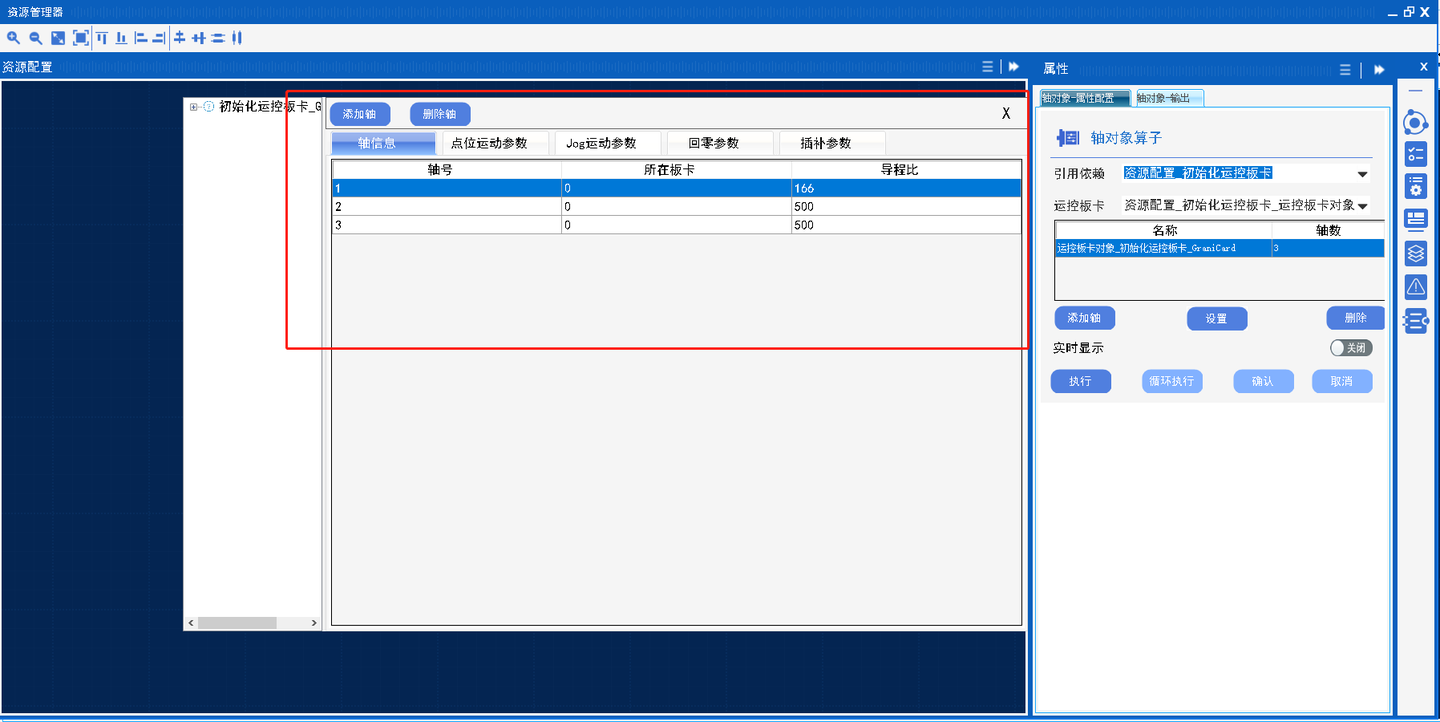
2.1通過(guò)初始化運(yùn)控板卡算子連接格拉尼總線型運(yùn)控卡,導(dǎo)入工程自動(dòng)進(jìn)行連接,此算子為使用運(yùn)控控制板卡的第一項(xiàng)操作,后續(xù)運(yùn)控算子需引用其輸出板卡對(duì)象才可使用。
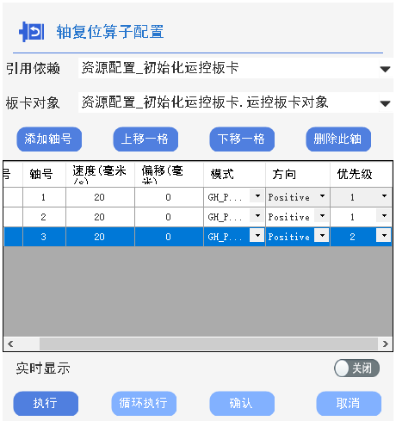
2.2通過(guò)軸對(duì)象算子增加控制軸數(shù)量以及配置每個(gè)軸的初始參數(shù),如軸導(dǎo)程比等參數(shù),注意因?yàn)檩S對(duì)象算子是為運(yùn)控板卡對(duì)象中添加控制軸數(shù),所以軸對(duì)象算子需引用運(yùn)控板卡對(duì)象,軸對(duì)象算子需在初始化運(yùn)控板卡算子后使用。
2.3使用全局變量定義速度參數(shù)與HMI進(jìn)行交互。
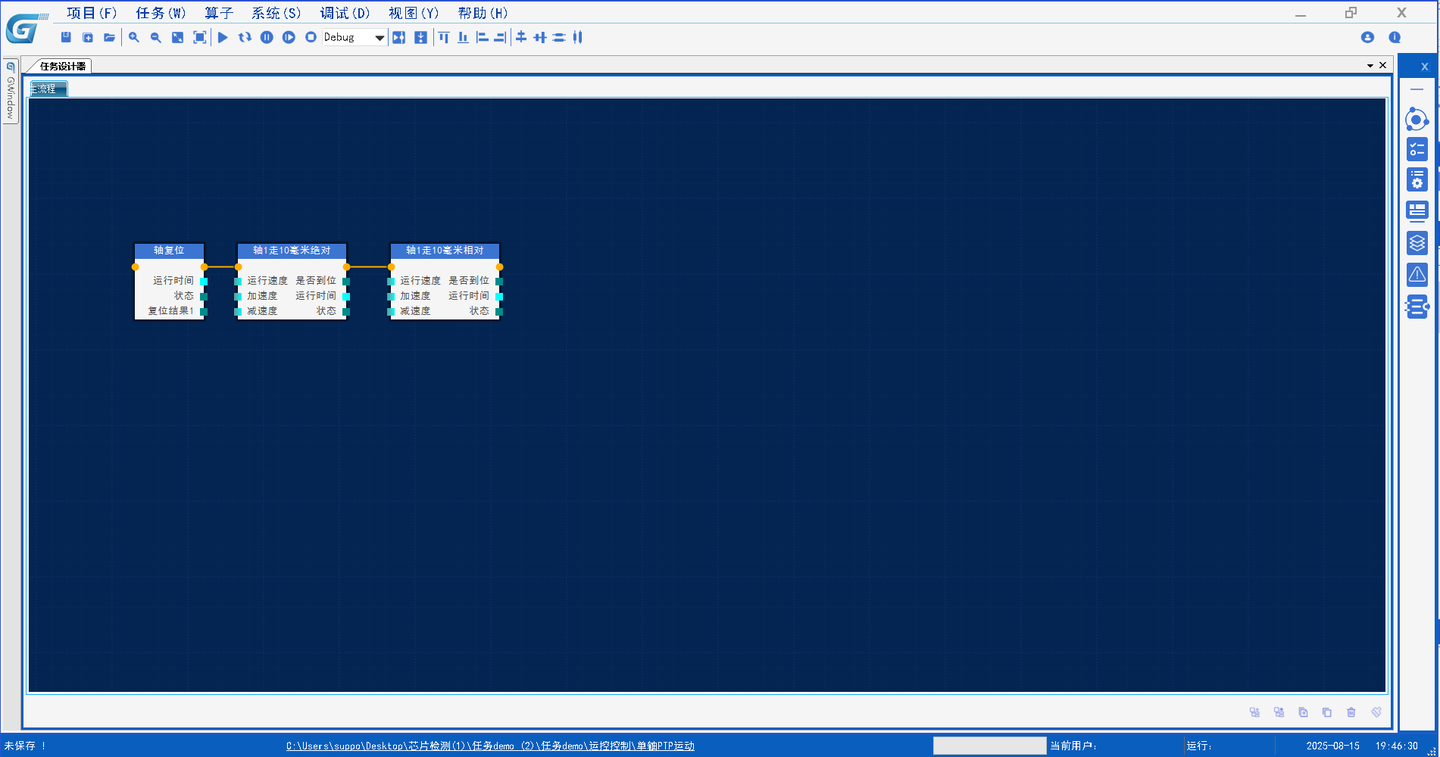
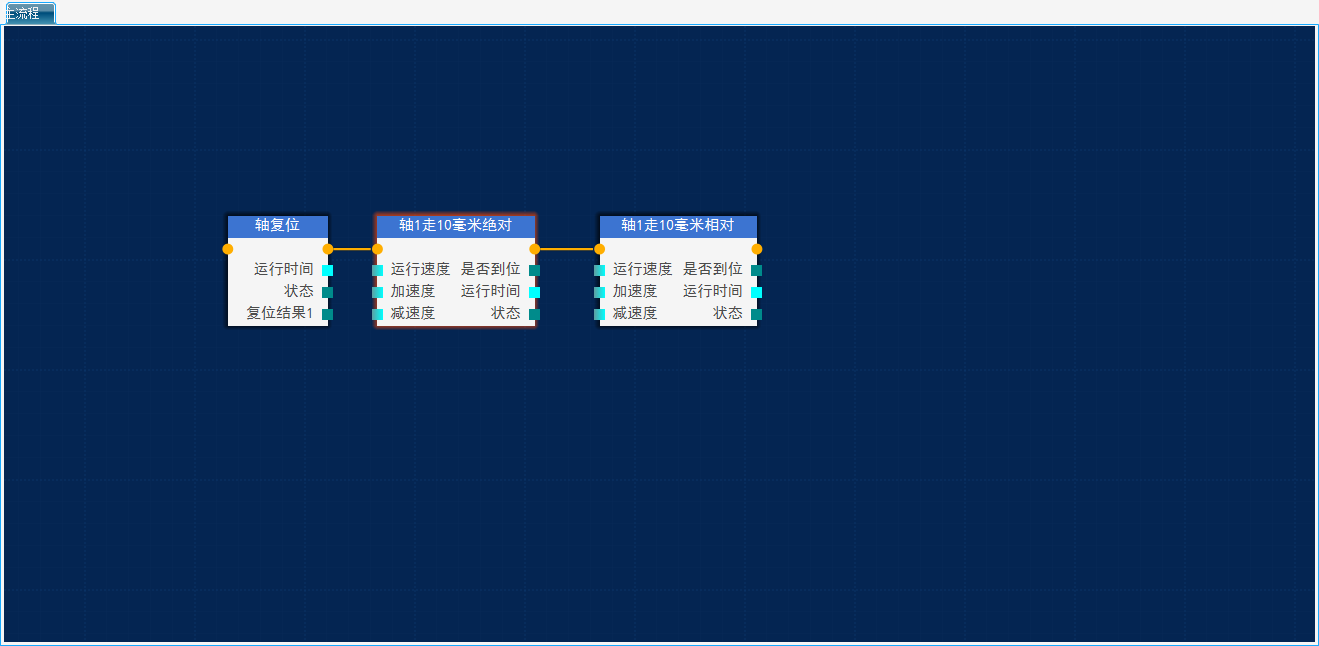
2.4使用軸復(fù)位算子以20毫米每秒速度控制軸1往負(fù)方向回零,使用軸自動(dòng)算子實(shí)現(xiàn)軸1相對(duì)10毫米以及絕對(duì)10毫米。
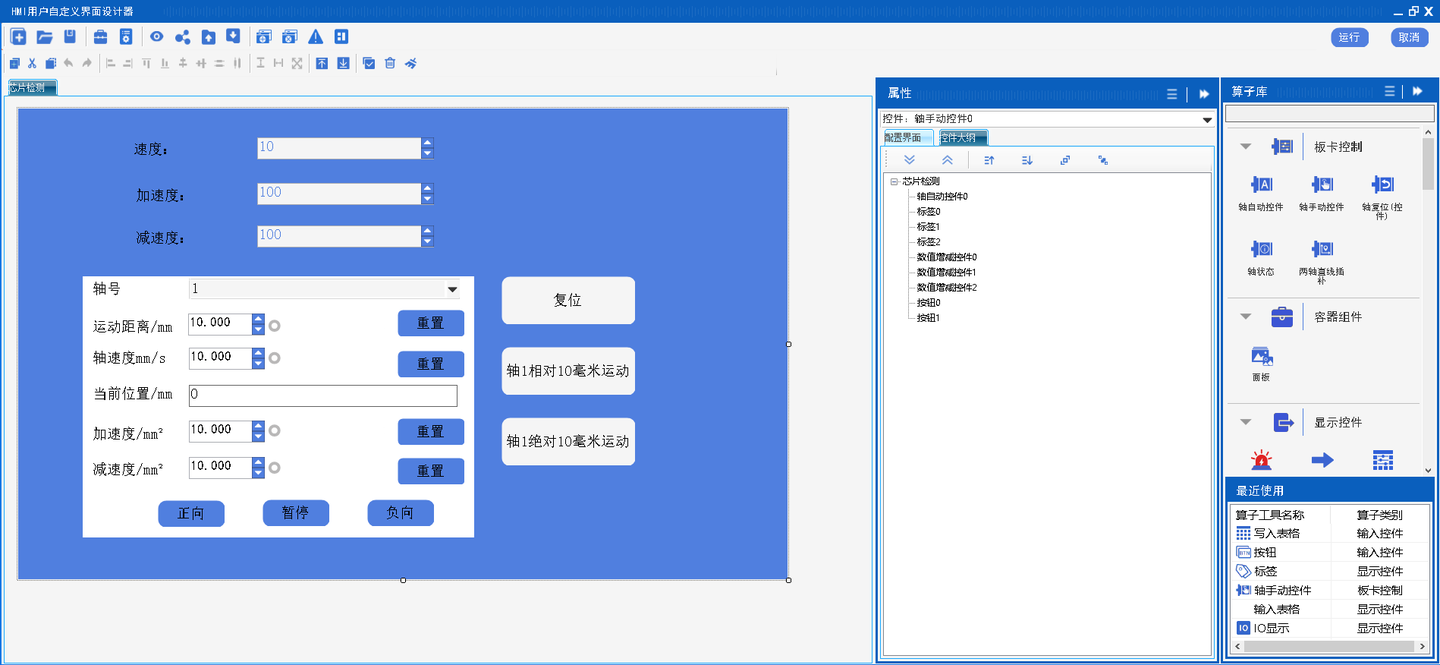
2.5 運(yùn)行HMI,在此區(qū)域內(nèi)調(diào)節(jié)軸點(diǎn)動(dòng)的速度、加速度與減速度。
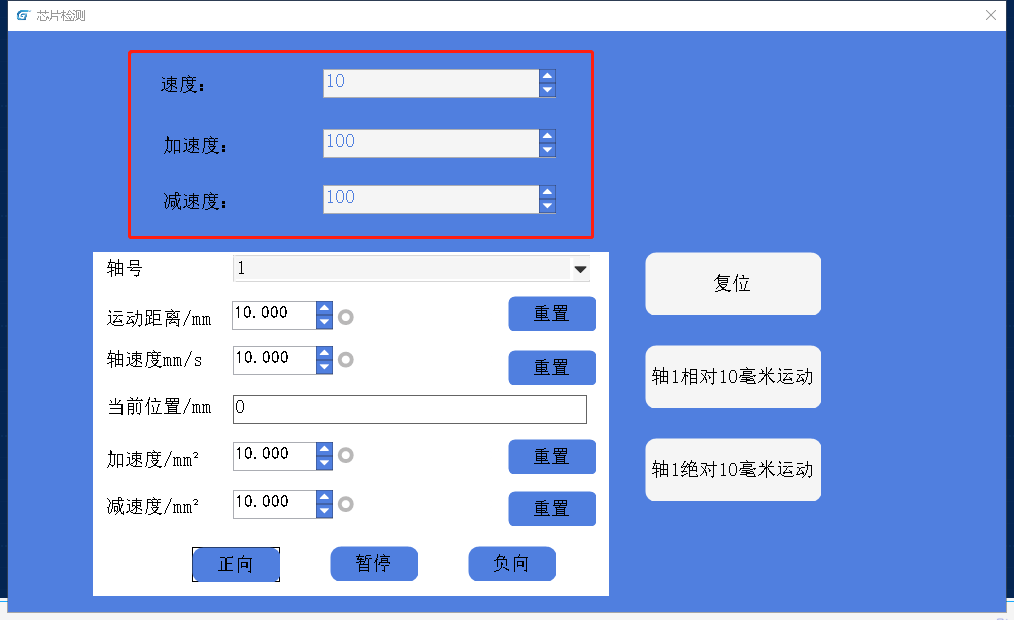
點(diǎn)擊復(fù)位按鈕,執(zhí)行主流程的復(fù)位算子控制軸1復(fù)位。
點(diǎn)擊軸1相對(duì)10毫米運(yùn)動(dòng)按鈕,執(zhí)行主流程的命名為軸1走10毫米相對(duì)算子,控制軸1相對(duì)運(yùn)動(dòng)10毫米。
點(diǎn)擊軸1絕對(duì)10毫米運(yùn)動(dòng)按鈕,執(zhí)行主流程的命名為軸1走10毫米絕對(duì)算子,控制軸1移動(dòng)到10毫米位置。
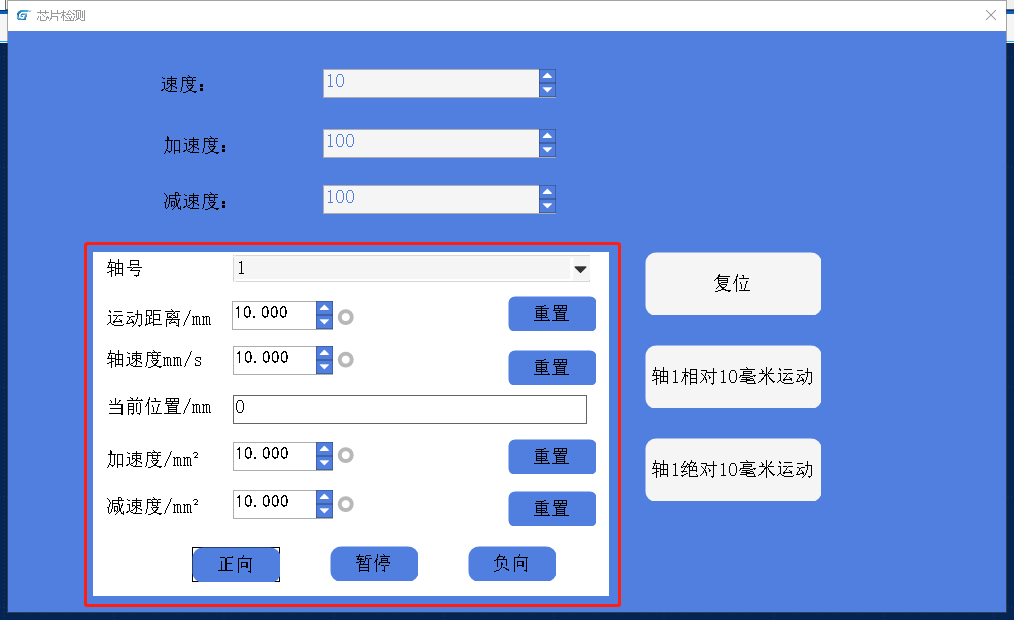
HMI提供軸自動(dòng)控件,方便實(shí)現(xiàn)單點(diǎn)控制,點(diǎn)擊正向按鈕控制軸1往正方向移動(dòng)10毫米,點(diǎn)擊負(fù)向按鈕控制軸1往負(fù)方向移動(dòng)10毫米。
3.異常處理
當(dāng)控制軸做點(diǎn)到點(diǎn)實(shí)際軸未運(yùn)動(dòng)時(shí):
查看軸是否處于使能狀態(tài)并查看驅(qū)動(dòng)器是否存在報(bào)警,存在報(bào)警可手動(dòng)執(zhí)行一遍資源管理器中的初始化運(yùn)控板卡與軸對(duì)象算子,執(zhí)行會(huì)重新連接運(yùn)控板卡,通常會(huì)清楚軸報(bào)警,如果還存在報(bào)警可通過(guò)斷驅(qū)動(dòng)器電再上電,查看驅(qū)動(dòng)器報(bào)警狀態(tài),未報(bào)警再執(zhí)行一遍資源算子進(jìn)行重連即可;
檢查正負(fù)限位開(kāi)關(guān)是否被誤觸發(fā)。
審核編輯 黃宇
-
PTP
+關(guān)注
關(guān)注
0文章
98瀏覽量
9795
發(fā)布評(píng)論請(qǐng)先 登錄
單軸/多軸 Trinamic 電機(jī)驅(qū)動(dòng)模塊怎么選?


GraniStudio:視覺(jué)和運(yùn)控例程

GraniStudio:相機(jī)標(biāo)定例程

GraniStudio:IO初始化以及IO資源配置例程

GraniStudio:IO寫入例程

GraniStudio:初始化例程

GraniStudio:單軸Jog運(yùn)動(dòng)例程

GraniStudio:獲取軸信息例程

GraniStudio:控制軸設(shè)置例程

GraniStudio:兩軸直線插補(bǔ)例程

GraniStudio:軸復(fù)位例程

GraniStudio零代碼平臺(tái)軸復(fù)位算子支持多少個(gè)軸同時(shí)復(fù)位,有哪些回零模式?
解讀單軸直線電機(jī)模組的行業(yè)應(yīng)用密碼
運(yùn)動(dòng)控制軸和單軸控制區(qū)別怎么選?工業(yè)自動(dòng)化工程師一文講透!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論