 借助3D數字孿生進行自動駕駛仿真
借助3D數字孿生進行自動駕駛仿真

*本文內容采用了機器翻譯
近 200 名大二學生聚集在早稻田大學寬闊的教室里。學生們準備好筆記本電腦,參加基于項目的學習高級講座系列,這是機械工程系的一門必修課程,通過項目作業教授專門的解決問題的技能,以提高能力。
草鹿仁教授在環境與出行部分展示了使用 Simulink 和 RoadRunner 為串聯混合動力電動汽車 (SHEV) 創建的駕駛員模型。SHEV 是一種帶有內燃機和電池供電電動機的電動汽車,該車輛正在大學附近繞行。學生學習如何操作集成模型并進行仿真以獲得燃油經濟性評級。隨后他們與同學們討論如何提高燃油效率。
“當車輛仿真輸出的數字只是簡單地以圖表形式呈現時,大多數學生無法想象駕駛汽車的感覺。”草鹿教授說道。“我們試圖激發他們的想象力。”
草鹿教授是著名的機械工程教授,領導早稻田大學下一代汽車研究機構(https://www.waseda.jp/inst/nextgv/en/about/overview),在日本汽車界頗具影響力。他在日本汽車工程師學會擔任技術總監和副總裁。在早稻田大學讀研究生期間,他與豐田汽車公司總裁佐藤恒治一起進行甲醇發動機的研究。
草鹿教授在系列講座中挑戰學生們像汽車工程師一樣思考,專注于優化燃油經濟性和電力成本。其目標是讓學生為汽車行業的職業生涯做好準備,早稻田大學與汽車行業保持著密切的聯系。幾家日本主要汽車制造商的總部都在附近,校友包括豐田、日產和五十鈴等跨國公司的高管。
“我們與汽車公司、汽車相關公司、重工業、政府機構以及汽車內燃機技術研究協會(AICE)合作開展研究項目,”草鹿教授說道。他的實驗室與 AICE 有一個聯合綠色創新項目,開發使用電子燃料的混合動力汽車的催化劑。這個國家組織致力于促進學術界、政府和工業界之間的合作。他還為地方和國家政府委員會提供排放和燃油經濟性方面的建議。
“從環境保護的角度來看,全球的排放和燃油經濟性法規變得越來越嚴格,”草鹿教授說。“汽車公司需要生產符合這些法規的汽車。”
考慮到這一點,草鹿教授和原田空樹(草鹿實驗室進行汽車動力系統研究的二年級碩士生)在系列講座中使用了早稻田的 MathWorks Campus-Wide License,并選擇了 Simulink 和 RoadRunner,因為它們具有先進的功能和易用性。
實驗室團隊首先駕駛一輛 2016 款 Nissan Note e-POWER 在大學附近預定路線上行駛。原田將這些道路測試中的交通信號和地圖數據以及其他關鍵公共信息(例如道路海拔和速度限制)拉入 Simulink 駕駛員模型中。他使用 RoadRunner 復制街景。原田、助教 (TA) 和 MathWorks 員工教學生操作集成模型并運行仿真。學生可以有效地重現真實的道路和交通環境來確定燃油經濟性等級。
“學生們在課堂上實現了多個目標,”草鹿教授回憶道。“他們的想法之所以能夠實現,是因為他們可以通過 RoadRunner 動畫看到車輛實際行駛的景象。”
嚴格的真實世界測試
在課堂之外,此類仿真對于評估新型乘用車的燃油經濟性和電力成本具有巨大的前景,有可能為汽車制造商節省大量 R&D 時間和成本。汽車工程師在計算燃油經濟性時會考慮現實世界的道路狀況。重要因素包括車輛重量、加速度、減速度、坡度阻力和滾動阻力。隨著車速的增加,空氣阻力也會變得更大。
草鹿教授的研究在底盤測功機上將新興的實際駕駛排放 (RDE) 測試與傳統的全球統一輕型汽車測試程序 (WLTP) 進行了比較。RDE 測試旨在補充實驗室測試,通過公共道路上行駛的乘用車上的便攜式實時監測設備測量一氧化碳、未燃燒的碳氫化合物、氮氧化物和顆粒物。測試在不同的環境、不同的溫度范圍、速度限制、交通水平和高度下進行。
草鹿教授指出:“傳統底盤發電機測試和實際駕駛中的廢氣和燃油效率存在差異。”“可以更精確測量的 RDE 變得越來越重要。”
在日本等強制要求新車必須具備 RDE 功能的國家,符合系數(CF)表示實際道路行駛過程中的廢氣值與臺架試驗測得的廢氣值之間的差異。監管機構設定了 CF 限制,汽車公司必須證明實際道路上的廢氣值不超過該限制。
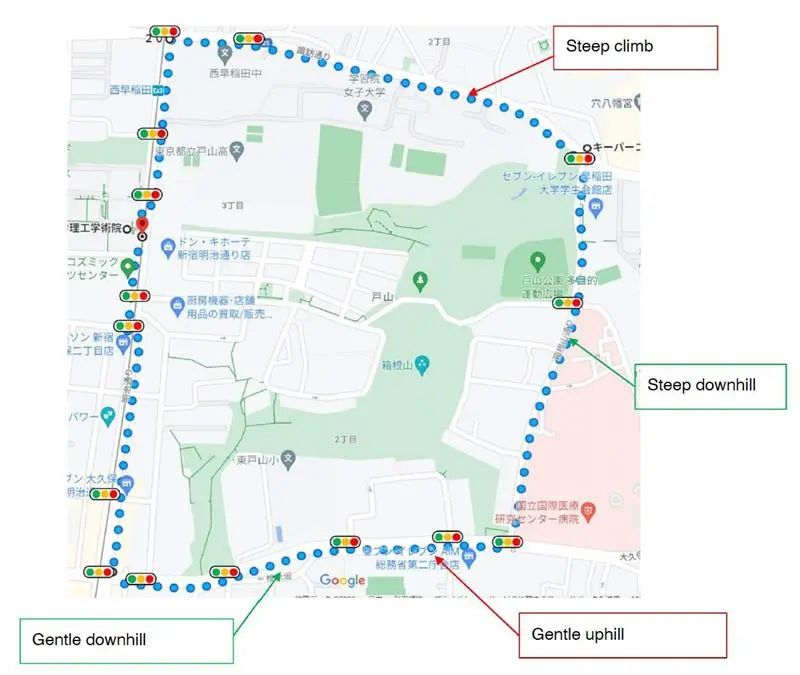
繪制車輛測試路線。(圖片來源:早稻田大學)
“在 90 至 120 分鐘的實際道路駕駛過程中,車輛必須按照一定比例在城市道路、鄉村道路和高速公路上行駛。還有其他限制,例如溫度、高度和最大速度的上限,”草鹿教授解釋道。“昂貴的重新測試并不罕見。”
草鹿教授繼續說道,使用 Simulink 和 RoadRunner 進行仿真可以提前預測性能,無需購買昂貴的專用測量設備并在實際車輛上進行測試。此外,找到與 RDE 測試具有相同道路、溫度和海拔的地點是不可能的。
他說道:“基于模型的設計的 RDE 仿真非常容易實現。”他的課堂即將證明這一點。
3D 數字孿生
草鹿教授選擇了 2016 款日產 Note e-POWER,因為已經開發出了高度精確的模型,而且他認為學生可以理解 SHEV 的簡單結構。位于大學附近新宿區的測試路線為一條長約 2.7 公里(1.7 英里)的環路,有不同程度的上坡和下坡。
駕駛測試于凌晨 1 點進行,以盡量減少其他車輛和行人,實驗室團隊有意沒有將其納入 RoadRunner Scenario 和 Simulink 協同仿真中。初始充電狀態設定為 60.0%。每位駕駛員在測試前都對車輛進行 20 分鐘的預熱,以確保發動機處于熱機狀態。車載 GoPro 獲取 GPS 信息,而診斷工具收集車輛基本數據。
原田在 Simulink 中創建了一個駕駛員模型,使用自動駕駛算法來仿真人類在路線上加速和減速的方式。
他從經濟產業省主導的項目創建并發布的模型中獲得了 SHEV 信息。然后,他上傳了日產 Note 組件的實際效率和控制流數據。
他從帶有時間戳的測試路線視頻中將所有 16 個交通信號燈的數據添加到 Simulink 中。計算會自動確定哪個燈位于虛擬車輛前方以及距離最短,類似于人類駕駛員觀察最近的燈的方式。他構建了兩種可能的剎車控制場景:恒定減速或突然停止。
仿真中的交通燈只能是紅色或綠色。視頻中的黃燈時間被劃分為一半,一半分配給綠燈,另一半分配給紅燈。原田在 RoadRunner 中設計了逼真的 3D 街景。
“我從 OpenStreetMap 獲取了該地區的地圖數據以及日本地理空間信息管理局提供的坡度數據,”他說。“將其上傳到 RoadRunner 后,我僅提取道路就創建了 3D 數字孿生。在可視化界面中工作非常直觀。”
學生們從大學云端下載了組合駕駛模型。回到教室,原田、助教和 MathWorks 團隊回答了有關 3D 數字孿生的問題。然后輪到學生了:他們的任務是根據他們唯一的學生證號碼的最后三位數字,以鳥瞰攝像機位置制作整個駕駛仿真的視頻。例如,123 表示攝像機距離 12 米,高度 3 米。
他說,此前,草鹿教授的學生依靠計算出的充電狀態圖,有些學生難以將計算結果與實際車輛駕駛聯系起來。這一次他們能夠看到結果了。
提高效率
通過 3D 數字孿生仿真,學生們了解了通過改變初始充電量與 SHEV 高壓電池充電深度相關的動力系統控制。之后,他們可以比較插電式和串聯混合動力電動汽車的成本和 CO2 排放。
“與真實車輛測試不同,基于模型的設計可以輕松測試車輛差異。上這門課的學生親眼目睹了如何利用插電式混合動力汽車來改善燃料消耗。”草鹿教授說道。“能夠將這項練習分配給二年級本科生班級真是太棒了。”
草鹿教授注意到,與前幾年相比,學生們使用 Simulink 和 RoadRunner 的數據分析和解釋能力有所提高。他們確定改變滾動阻力、改變空氣阻力和提高發動機的熱效率是熱能轉換效率的因素。一些人還提出了一些有關發動機控制的先進想法。
原田說:“利用基于模型的設計和 Simulink,學生們探索了如果熱效率提高到 50% 或實施插電式混合動力系統對燃油效率的影響。”
研究小組發現,將發動機運行區域的熱效率提高到 50% 左右可以將燃料消耗降低到 21.52 兆焦耳,比基線降低 37%。學生們獲得了可以在現實世界中應用的汽車知識。
“懂得如何使用基于模型的設計進行汽車研發的工程專業畢業生將可以立即開始工作,”K原田說道。畢業后,原田將加入豐田汽車公司,他期待利用基于模型的設計和設備測試來開發汽車,并直接借鑒
他在實驗室的經驗。
最近,草鹿教授實驗室開始了在冷啟動期間通過提前預熱發動機來提高插電式混合動力汽車的熱效率和廢氣排放的研究。RDE 測試支持比 WLTP 測試更寬的溫度范圍,因此冬季啟動可能會產生連鎖反應。該團隊還計劃擴展系列講座的駕駛員模型,以納入加速和減速對燃油效率的影響。加速和減速時考慮的因素包括行人、其他車輛和彎道。
研究人員預計他們的行業合作伙伴將從 Simulink 和 RoadRunner 中受益匪淺。
草鹿教授表示:“如果汽車的所有部件都用汽車制造商和供應商處理的通用模型來表示,那么預測零件發生變化時的性能就會變得更容易。”“我們相信基于模型的設計及其對車輛開發和 RDE 測試的仿真將大大有助于降低汽車公司的成本。”
全球 6,500 多所高校使用 MATLAB 和 Simulink 廣泛開展各類工程和科學學科的教學與研究。目前,有 2,300 多所大學(包括全球 300 所頂尖大學中的 89%)可通過 Campus-Wide License 無限制訪問所有 MathWorks 產品。
-
matlab
+關注
關注
189文章
3027瀏覽量
238969 -
自動駕駛
+關注
關注
794文章
14930瀏覽量
180639 -
數字孿生
+關注
關注
4文章
1673瀏覽量
14004
原文標題:在早稻田大學 × MATLAB:學生使用 3D 數字孿生進行自動駕駛仿真
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄


自動駕駛場景生成方法及優選方案:康謀aiSim 3DGS方案重塑行業標準
高校自動駕駛研究新基建:“實測 - 仿真” 一體化數據采集與驗證平臺

aiSim領銜!國內外自動駕駛仿真軟件大全:熱門推薦與選擇指南
自動駕駛仿真軟件推薦:康謀aiSim——ISO 26262 ASIL-D 認證的高保真選擇

端到端智駕仿真軟件推薦:全球首款ASIL-D認證平臺助您突破自動駕駛測試瓶頸
立體視覺和激光雷達在3D智駕感知領域的差異分析

自動駕駛中端到端仿真與基于規則的仿真有什么區別?
講講如何閉環自動駕駛仿真場景,從重建到可用?

生成式 AI 重塑自動駕駛仿真:4D 場景生成技術的突破與實踐

淺析4D-bev標注技術在自動駕駛領域的重要性
搭建完整的ADAS測試鏈路,推動自動駕駛技術的安全發展
為什么仿真對于自動駕駛來說非常重要?




 工商網監
工商網監
評論