 立體視覺和激光雷達在3D智駕感知領域的差異分析
立體視覺和激光雷達在3D智駕感知領域的差異分析

引言
隨著智能駕駛技術從L2級輔助駕駛向L3級有條件自動駕駛加速演進,感知系統作為自動駕駛的“眼睛”,其技術路線的選擇一直成為行業核心議題焦點,在3D智駕感知賽道,究竟誰會更勝一籌呢?目前市場主流的高階智駕感知傳感器為單目攝像頭+毫米波雷達+激光雷達,并且擁有大部分市場占有率,但是隨著技術的發展雙目立體視覺憑借其特色優勢在智駕感知逐漸占有一席之地,以立體視覺為技術的雙目、三目、一體機、Adas等產品的市場占有率也逐漸提升,“智駕未來Lidar方案”逐步向“視覺+雷達”多元化結合的方案轉變,此次我們圍繞“3D智駕感知領域”推出兩篇文章,做一個客觀解讀,探討立體視覺在智駕領域的優勢以及未來的發展。
激光雷達必要嗎?
特斯拉首席執行官埃隆?馬斯克經常在正式場合就激光雷達(我們后文稱之“LiDAR”)應用在智駕領域多次發表自己的觀點,他認為:不同傳感器的信息在融合時會出現偏差,從而引發安全風險,而自動駕駛的勝利一定屬于大道至簡的人眼仿生學。
他認為Lidar是昂貴、多余且脆弱。視覺可以“復制人類駕駛的方式”。經過充分開發和訓練基于視覺算法的AI系統,能應用于智能駕駛,甚至可以做得更好。
感知技術原理
在現代智能感知系統中,LiDAR與雙目立體視覺是兩種三維環境感知技術,均可以應用于智駕感知領域。它們分別模擬了主動激光探測與人類視覺的物理機制,但是各自在數據獲取方式、信息表達形式和系統構建邏輯上存在一定的差異性。LiDAR的優勢在于精確的測距能力和可靠性,而雙目立體視覺的核心優勢在于它提供了與人類視覺相似的、富含紋理和語義的深度信息,而且成本更低,在經濟形勢發展趨緩當下社會認可度逐漸提升,應用范圍逐漸擴大。
LiDAR與雙目立體視覺逐漸成為自動駕駛、機器人感知等領域的兩大核心感知技術,二者基于不同原理(激光測距 vs 視覺匹配)形成差異化能力。雙目立體視覺的性能優勢主要集中在成本控制、語義感知維度、環境適應性、系統集成靈活性等方面,我們在接下來做詳細介紹。
差異分析
在現代智能感知系統中,LiDAR與雙目立體視覺在數據獲取方式、信息表達形式和系統構建邏輯上存在根本性差異。理解這些差異是評估其性能優劣的前提。
(一)激光雷達
LiDAR是一種主動式三維測距傳感器,其工作原理是通過發射激光脈沖(通常為近紅外波段),并精確測量激光束從發射到被物體反射后返回接收器的時間差(Time of Flight, ToF)或相位差,從而直接計算出目標點與傳感器之間的距離。
LiDAR通過高速旋轉或掃描鏡陣列,對周圍環境進行多角度、高密度的點云掃描,每秒可生成數十萬至上百萬個三維點,形成連續的、高精度的三維空間結構圖。這種點云數據直接包含了每個點的三維坐標(X, Y, Z)以及反射強度等物理屬性,能夠精確還原物體的幾何輪廓、形狀和空間位置,無需依賴復雜的圖像推斷。其數據獲取方式具有直接物理測量的特性,從根本上避免了因算法推斷帶來的信息損失和誤差累積,因此在測距精度和空間結構還原上具有天然優勢。
(二)雙目立體視覺
相比之下,雙目立體視覺擁有其自身的特色,其核心原理基于視差三角測量,模仿人類雙眼的立體感知機制如下圖所示。
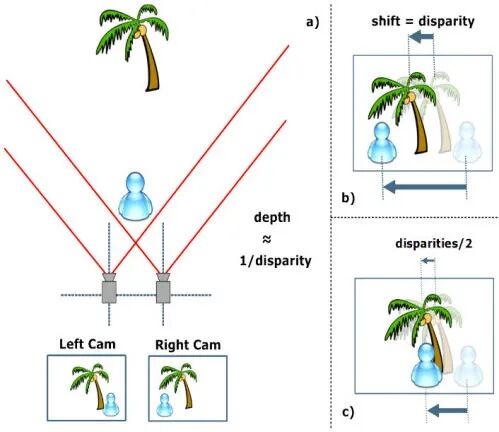
系統由兩個攝像頭組成,以一定的物理基線(即兩攝像機之間的距離)并行安裝,同時拍攝同一場景的兩幅二維圖像。通過算法在兩幅圖像中尋找同一空間點的對應像素(即特征匹配),計算其在左右圖像中的位置差異(視差),再結合已知的基線長度和相機內參,利用三角幾何關系推算出該點在三維空間中的深度信息。這一過程本質上是被動式感知,依賴環境中的自然光照,不主動發射能量,因此其性能高度依賴于場景的紋理豐富度、光照均勻性和圖像質量。
其技術流程通常包括:圖像獲取、攝像機標定、特征提取、立體匹配和三維重建五個關鍵步驟。其中,立體匹配是算法中最復雜且易出錯的環節,尤其是在紋理缺失、光照不均或存在重復圖案的區域,容易產生誤匹配,從而影響深度圖的準確性。
(三)數據類型
從數據類型上看,LiDAR直接輸出的是三維點云數據,每個點都是一個獨立的、精確的物理坐標,信息表達更為直接和可靠,雙目立體視覺則是輸出的是二維圖像序列,其深度信息是通過算法從圖像中“推算”出來的,屬于一種間接的、基于模型的估計。二者本質差異決定了兩者在處理復雜場景時的底層邏輯不同:LiDAR像一個“測繪儀”,直接“打點”獲取空間坐標,而雙目立體視覺更像一個“解碼器”,需要從圖像中解析出深度。
在一定程度上立體視覺擁有其獨特的優勢,下一章我們就立體視覺的優勢做具體介紹。
-
立體視覺
+關注
關注
0文章
42瀏覽量
10056 -
激光雷達
+關注
關注
981文章
4509瀏覽量
196785 -
中科慧眼
+關注
關注
0文章
55瀏覽量
478
原文標題:立體視覺VS激光雷達:3D智駕感知賽道,誰會更勝一籌?(上)
文章出處:【微信號:zhaoyaomojingdyh,微信公眾號:中科慧眼】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
固態激光雷達參數以及避障視頻
一徑科技NZ系列廣角全場景3D激光雷達全面賦能商用清潔機器人
禾賽科技2025年割草機器人3D激光雷達出貨量第一
全球體積最小4D FMCW激光雷達亮相!


智駕感知系統中立體視覺相對于LiDAR的性能優勢

激光雷達為什么會出現串擾的問題?

洛微科技攜4D FMCW激光雷達與3D感知方案閃耀光博會,引領行業新趨勢

季豐電子邀您相約2025國際3D視覺感知與應用大會
奧比中光發布最新一代3D激光雷達及雙目深度相機
自動駕駛只用激光雷達進行感知會有哪些問題?
一徑科技NZ1全場景廣角3D激光雷達,面向泛機器人應用場景

激光雷達技術在自動駕駛汽車中的應用




 工商網監
工商網監
評論