") 淺析4D-bev標注技術(shù)在自動駕駛領(lǐng)域的重要性
淺析4D-bev標注技術(shù)在自動駕駛領(lǐng)域的重要性

?自動駕駛技術(shù)的發(fā)展日新月異。從最初簡單的輔助駕駛功能,逐步邁向高度自動化甚至完全自動駕駛的階段。其中,海量且精準的數(shù)據(jù)是訓練高性能自動駕駛模型的基石。4D-BEV(四維鳥瞰視角)標注技術(shù)作為環(huán)境感知領(lǐng)域的一項突破性創(chuàng)新,通過引入時間維度與全局視角,為自動駕駛系統(tǒng)提供了高精度、多模態(tài)的時空真值數(shù)據(jù),重塑了自動駕駛系統(tǒng)的開發(fā)范式。
4D-BEV標注是什么?
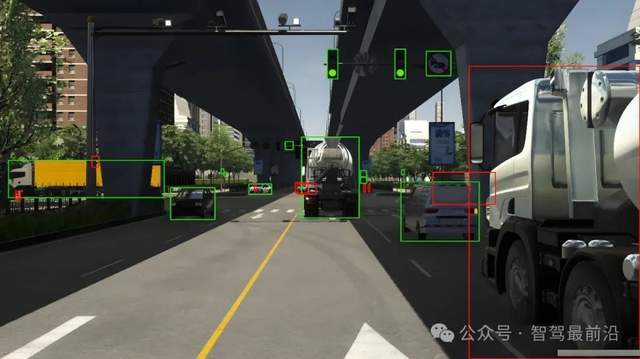
4D-BEV 標注技術(shù),即在3D空間的基礎(chǔ)上,引入時間維度進行數(shù)據(jù)標注。BEV(Bird's Eye View)代表鳥瞰視角,通過算法將攝像頭采集的 2D 圖像轉(zhuǎn)換為上帝視角的俯視圖,形成包含空間位置、運動軌跡、速度、加速度等時序信息的四維標注體系。例如,在一段交通視頻中,4D-BEV 標注可以清晰地記錄每輛車在不同時刻的位置、行駛方向和速度變化,為后續(xù)分析和模型訓練提供豐富的數(shù)據(jù)。
4D-BEV標注技術(shù)的實現(xiàn)方式
實現(xiàn) 4D-BEV 標注需要融合多種技術(shù)。首先是傳感器技術(shù),包括攝像頭、激光雷達、毫米波雷達等,不同傳感器從不同角度獲取環(huán)境信息。然后,借助多傳感器融合算法,將這些來自不同傳感器的數(shù)據(jù)在同一坐標系下進行對齊和融合,減少信息丟失,提高感知的準確性和可靠性。同時,利用先進的目標檢測、跟蹤和識別算法,對動態(tài)和靜態(tài)目標進行精準標注和持續(xù)跟蹤,生成包含時間維度的標注數(shù)據(jù)。
例如,標貝科技的4D-BEV工具支持激光雷達、攝像頭、毫米波雷達等多模態(tài)數(shù)據(jù)融合,可處理上億像素點云數(shù)據(jù),實現(xiàn)500米前后、200米左右的高精度感知。
4D-BEV 標注技術(shù)的應(yīng)用價值
1、提升感知算法性能
(1)高精度目標檢測:4D-BEV標注提供毫米級精度的目標位置、速度、加速度信息,支持算法區(qū)分靜態(tài)障礙物,包括路沿、交通標志,以及動態(tài)目標,包括車輛、行人等。例如,標貝科技的4D標注工具鏈相比傳統(tǒng)標注方式,標注準確性提高約20%,顯著提升目標檢測召回率。
(2)復雜場景理解:通過記錄目標形態(tài)變化(如車輛轉(zhuǎn)向、行人姿態(tài)),算法可學習更豐富的上下文信息,增強對遮擋、光照變化等復雜場景的魯棒性。
2、優(yōu)化決策規(guī)劃模塊
(1)預測與軌跡規(guī)劃:時序標注數(shù)據(jù)為算法提供目標未來運動趨勢預測能力,支持更安全的軌跡規(guī)劃。例如,4D-BEV標注可生成車輛未來5秒的軌跡預測,輔助決策模塊規(guī)避潛在碰撞風險。
(2)仿真場景庫構(gòu)建:基于標注數(shù)據(jù)重建靜態(tài)場景與動態(tài)目標,通過合成新場景(如突發(fā)障礙物、極端天氣)進行算法測試,降低實車測試成本與風險。
3、增強系統(tǒng)安全性
(1)長尾場景覆蓋:4D標注可捕捉低頻高風險事件(如行人突然闖入車道),為算法提供針對性訓練數(shù)據(jù),減少“黑天鵝”事件發(fā)生率。
(2)數(shù)據(jù)閉環(huán)優(yōu)化:通過影子模式采集實車數(shù)據(jù),結(jié)合4D標注進行模型迭代,形成“采集-標注-訓練-部署”的閉環(huán),持續(xù)提升系統(tǒng)安全性。
4D-BEV 標注技術(shù)應(yīng)用案例
標貝科技的4D-BEV 標注系統(tǒng)在已經(jīng)多個場景中得到應(yīng)用。其基于大模型的多模態(tài)預識別,自動完成3D障礙物檢測、車道線分割、動態(tài)目標追蹤等目標識別,標注員只需微調(diào)即可快速完成標注任務(wù)。
同時標貝科技4D-BEV標注系統(tǒng)還支持在普通8G內(nèi)存電腦上流暢處理百億量級點云數(shù)據(jù),包括2萬幀以上時序數(shù)據(jù)的快速加載,多機位視角的靈活展示與操作,如鳥瞰、BEV、4D視圖等查看。借助AI自動化標注模型和云端分布式處理技術(shù),降低標注成本約30%。目前已經(jīng)賦能10余家客戶加速全民智駕進程。
4D-BEV標注技術(shù)的未來趨勢
1、自動化標注技術(shù)深化
(1)大模型賦能:基于Transformer的預訓練模型可自動生成標注候選框,減少人工干預。例如,數(shù)據(jù)堂的4D標注工具通過預識別標注技術(shù),將標注效率提升50%以上。
(2)半監(jiān)督學習:利用少量高質(zhì)量標注數(shù)據(jù)訓練模型,再通過無監(jiān)督學習擴展標注范圍,降低數(shù)據(jù)成本。
2、跨模態(tài)融合與前融合
(1)傳感器前融合:在BEV空間直接融合多傳感器數(shù)據(jù),減少信息損失。例如,4D-BEV支持在鳥瞰視角下融合激光雷達點云與攝像頭圖像,提升目標識別準確率。
(2)多任務(wù)學習:將目標檢測、語義分割、深度估計等任務(wù)統(tǒng)一建模,共享特征提取網(wǎng)絡(luò),提升算法效率。
3、行業(yè)生態(tài)協(xié)同
(1)數(shù)據(jù)共享平臺:構(gòu)建自動駕駛數(shù)據(jù)聯(lián)盟,促進標注數(shù)據(jù)、仿真場景的共享與復用。
(2)工具鏈標準化:制定4D-BEV標注工具的接口規(guī)范與數(shù)據(jù)格式標準,降低企業(yè)開發(fā)成本。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2576文章
54937瀏覽量
790546 -
自動駕駛
+關(guān)注
關(guān)注
793文章
14852瀏覽量
179343
發(fā)布評論請先 登錄
自動駕駛場景生成方法及優(yōu)選方案:康謀aiSim 3DGS方案重塑行業(yè)標準
自動駕駛BEV Camera數(shù)據(jù)采集系統(tǒng):高精度時間同步解決方案

自動駕駛BEV Camera數(shù)據(jù)采集:時間同步技術(shù)解析與康謀解決方案

自動駕駛數(shù)據(jù)標注是所有信息都要標注嗎?

恩智浦4D成像雷達如何助力自動駕駛發(fā)展
淺析多模態(tài)標注對大模型應(yīng)用落地的重要性與標注實例
生成式 AI 重塑自動駕駛仿真:4D 場景生成技術(shù)的突破與實踐

自動駕駛數(shù)據(jù)標注主要是標注什么?
低速自動駕駛與乘用車自動駕駛在技術(shù)要求上有何不同?

什么是自動駕駛數(shù)據(jù)標注?如何好做數(shù)據(jù)標注?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術(shù)要求上有何不同?

端到端數(shù)據(jù)標注方案在自動駕駛領(lǐng)域的應(yīng)用優(yōu)勢
為什么仿真對于自動駕駛來說非常重要?

標貝科技“4D-BEV上億點云標注系統(tǒng)”入選國家數(shù)據(jù)局首批數(shù)據(jù)標注優(yōu)秀案例



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論