 開疆智能ModbusTCP轉Profient網關連接ER機器人配置案例
開疆智能ModbusTCP轉Profient網關連接ER機器人配置案例

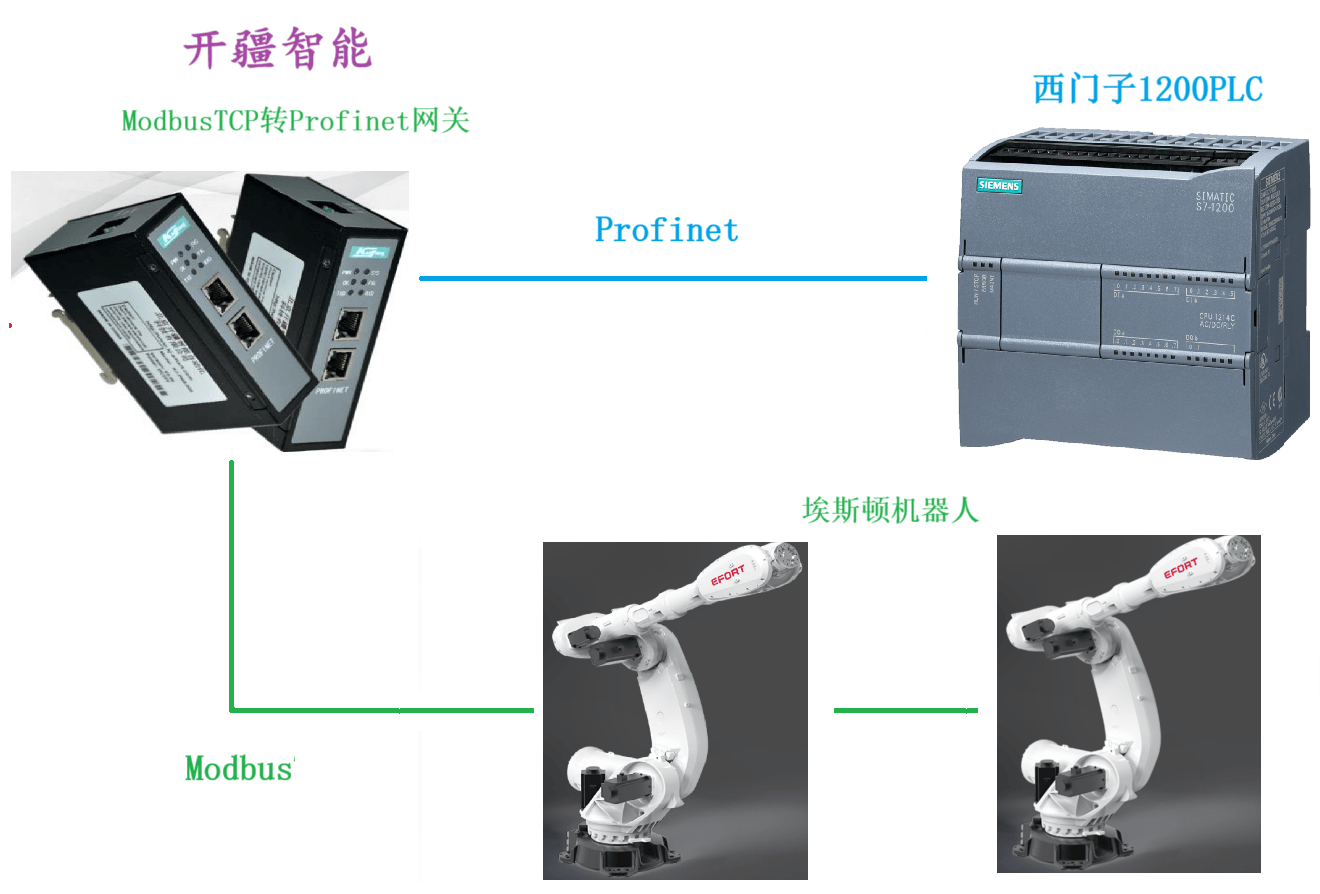
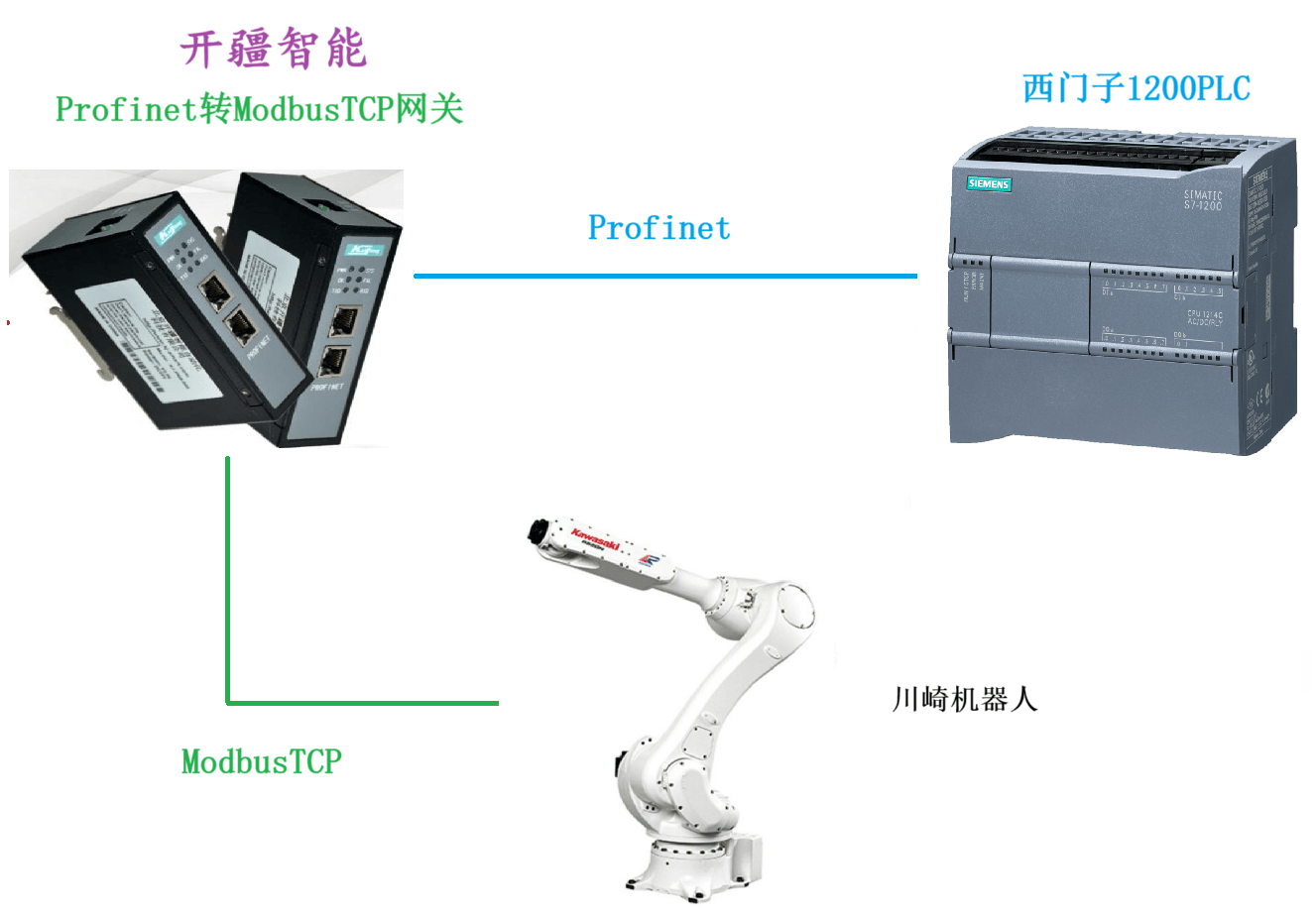
本案例時西門子1200PLC通過ModbusTCP轉Profinet網關連接埃斯頓機器人的配置案例,網關作為ModbusTCP的客戶端連接機器人。
配置過程:
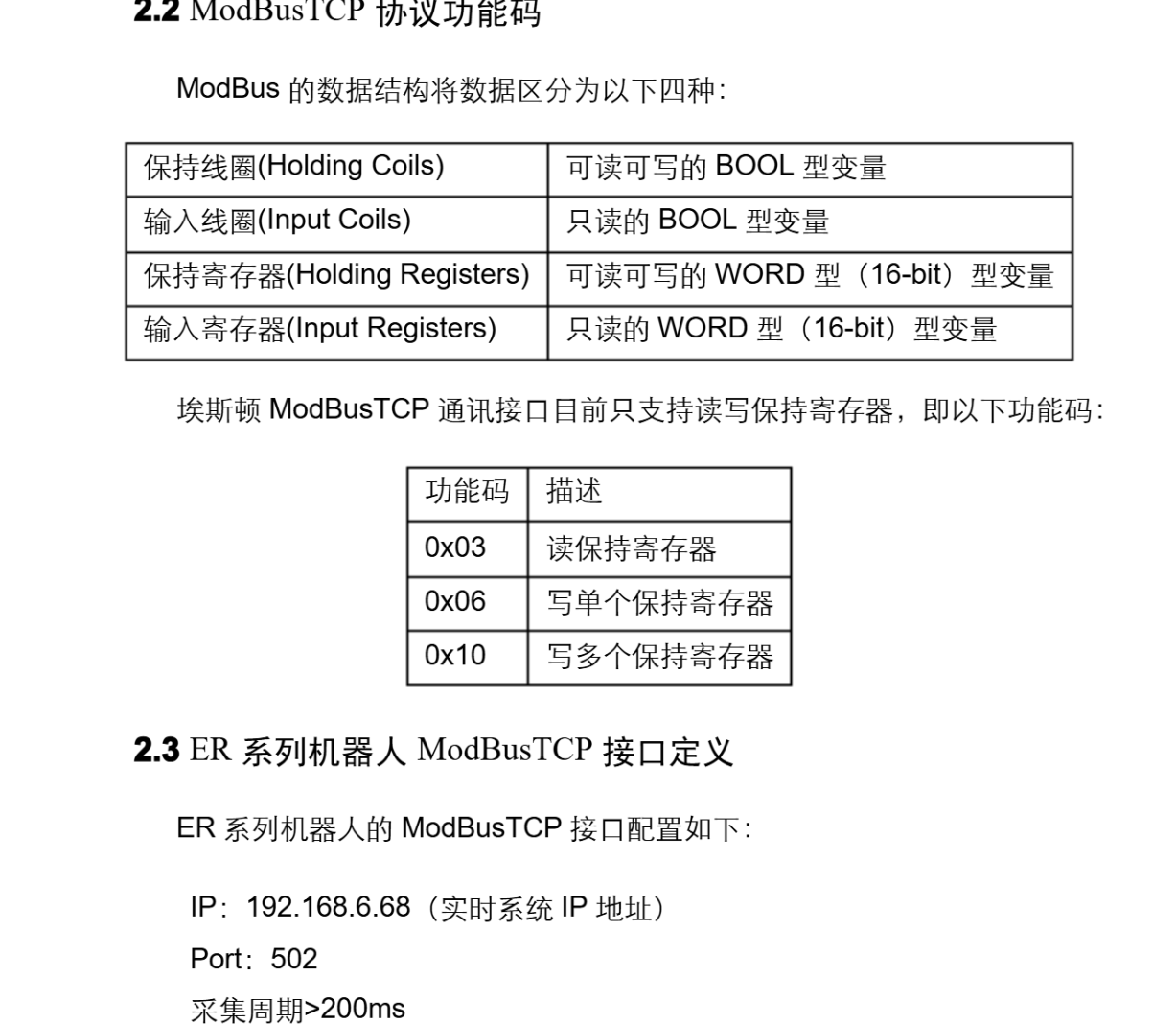
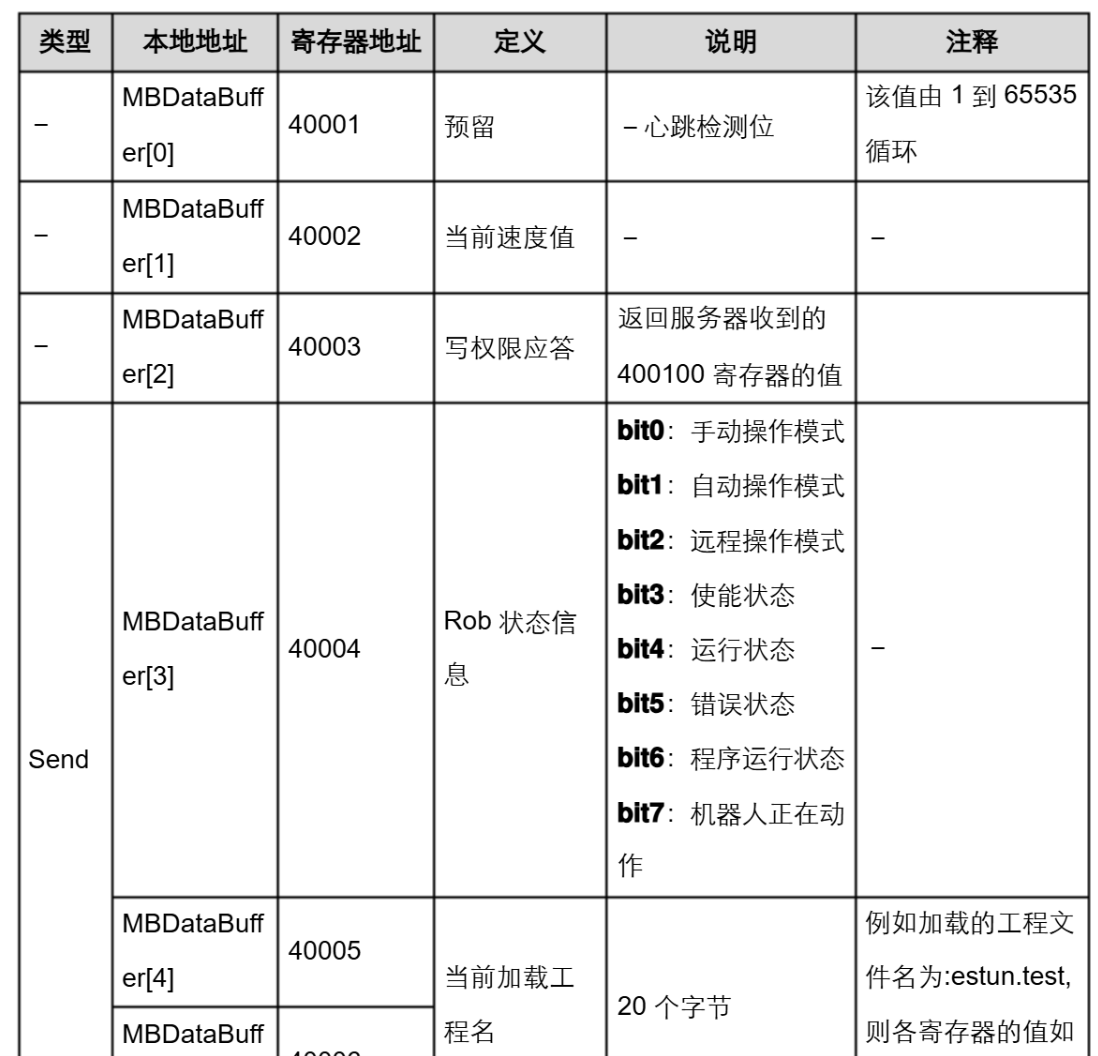
首先打開機器人通訊手冊。查詢機器人支持的功能碼及默認IP和端口號
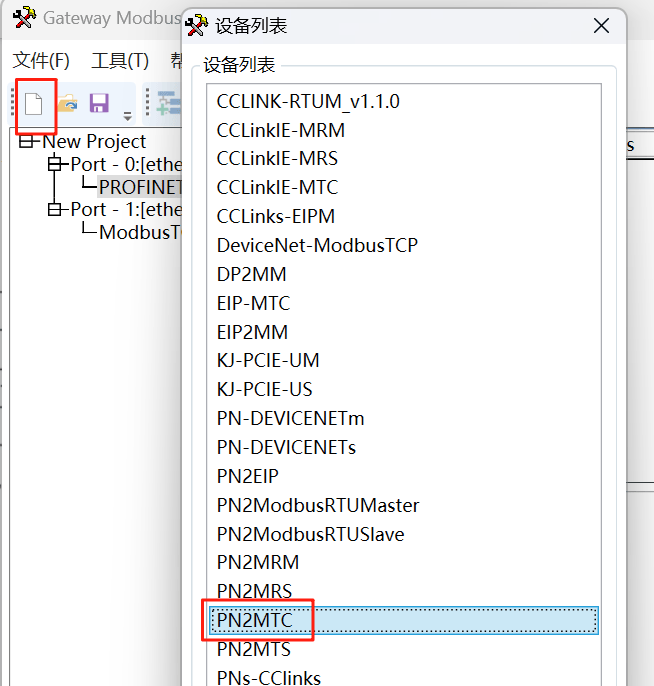
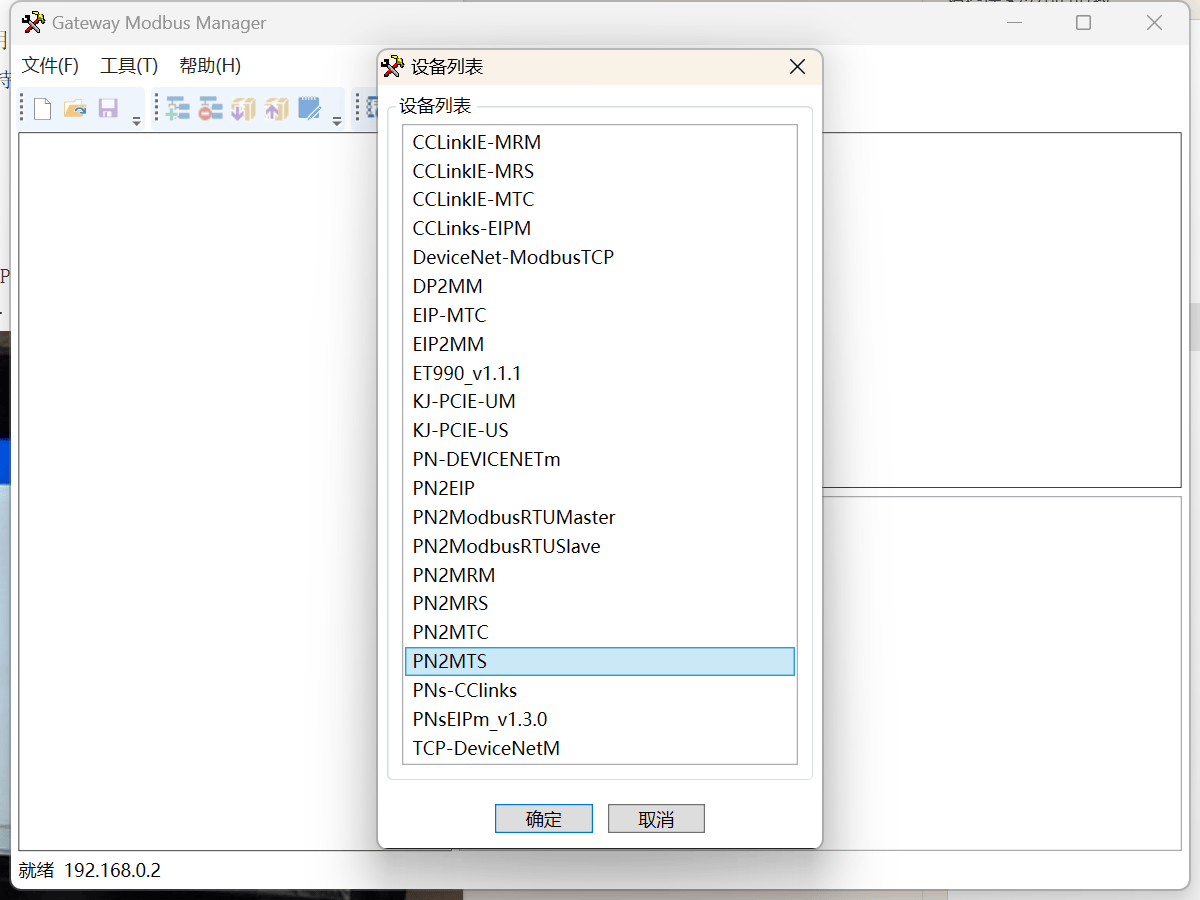
打開網關配置軟件“Gateway Configuration Studio”新建項目“PN2MTC”
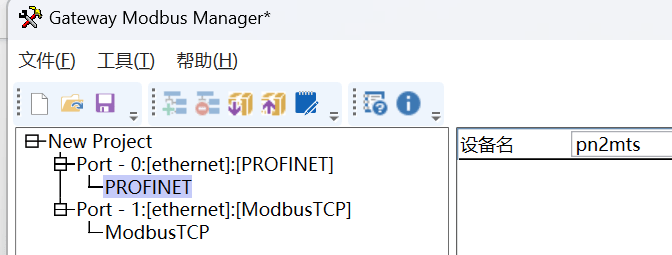
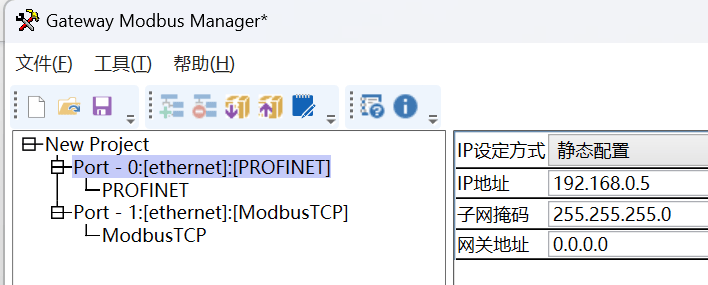
設置網關在Profinet一側的設備名稱與IP地址,與PLC一側組態配置保持一致。
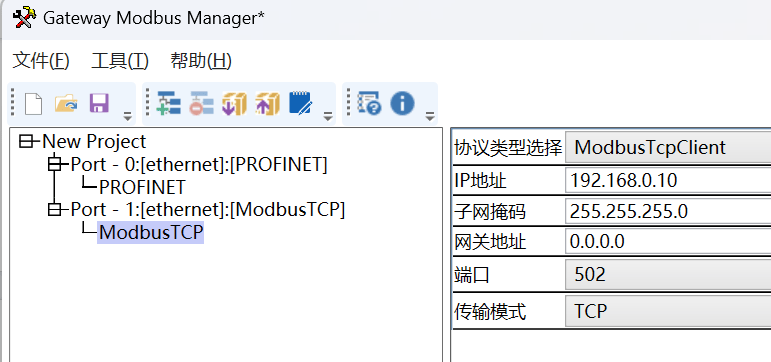
設置網關作為ModbusTCP客戶端的IP地址,與機器人保持同一網段。
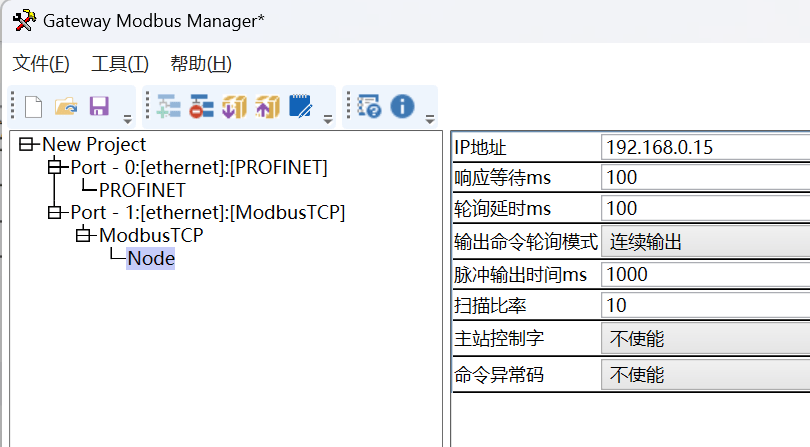
添加Node并填寫機器人IP地址,并設置讀寫時間參數。
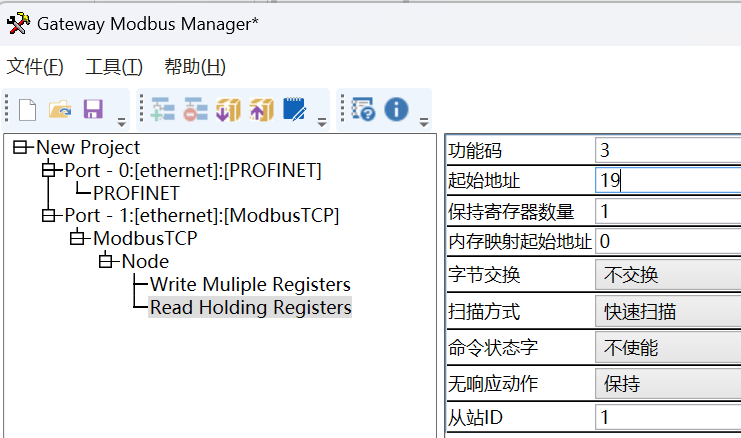
選擇需要用到的功能碼用于對機器人進行讀寫。
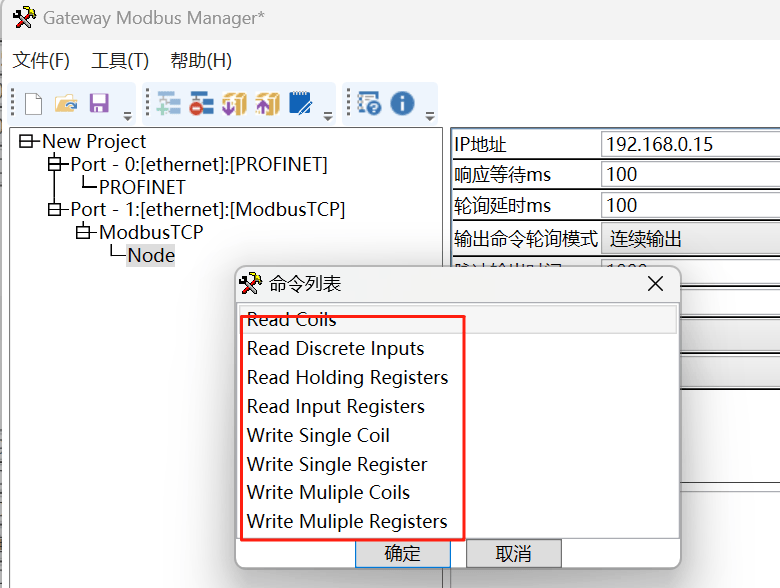
根據需要填寫對應的寄存器地址與數量
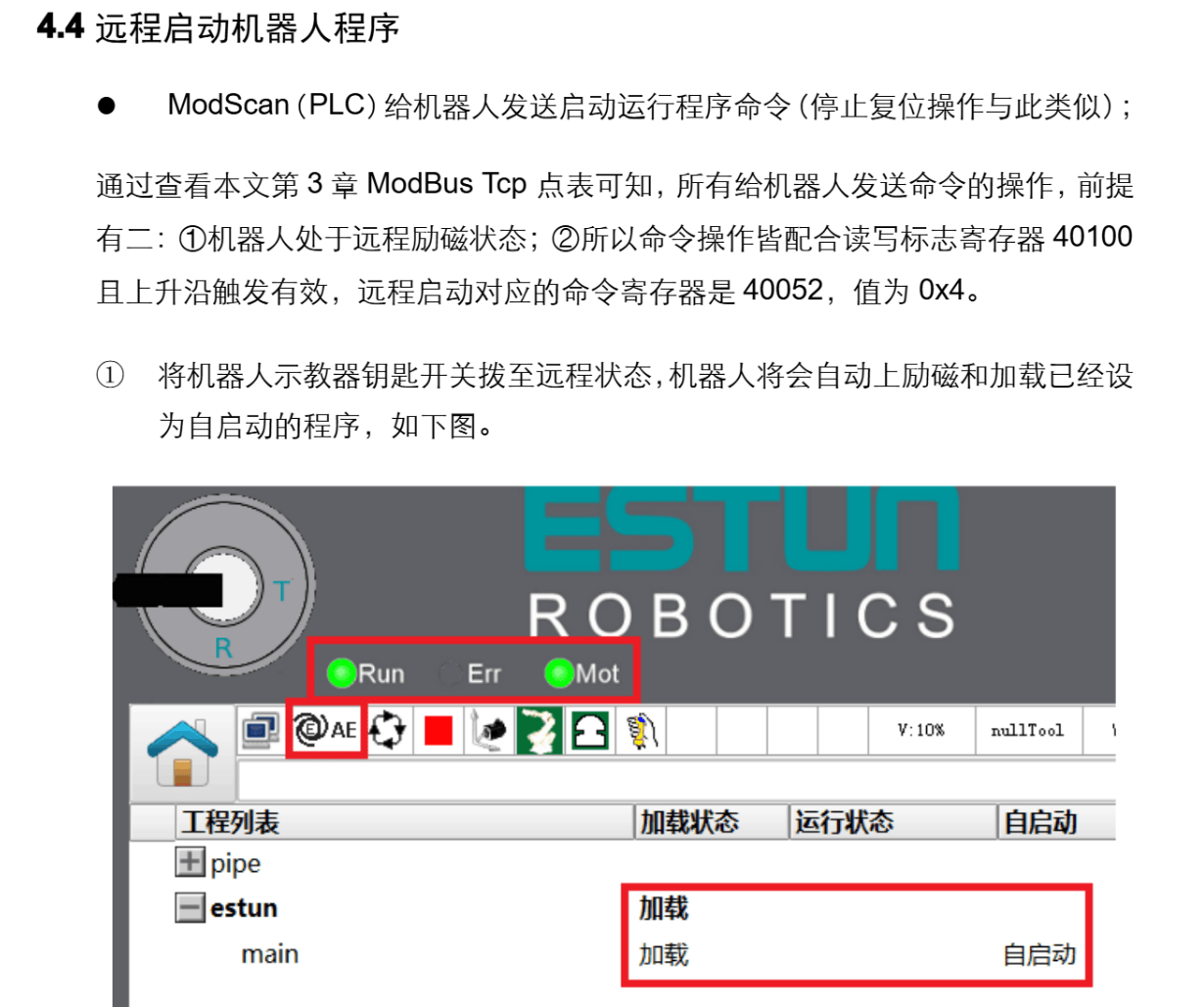
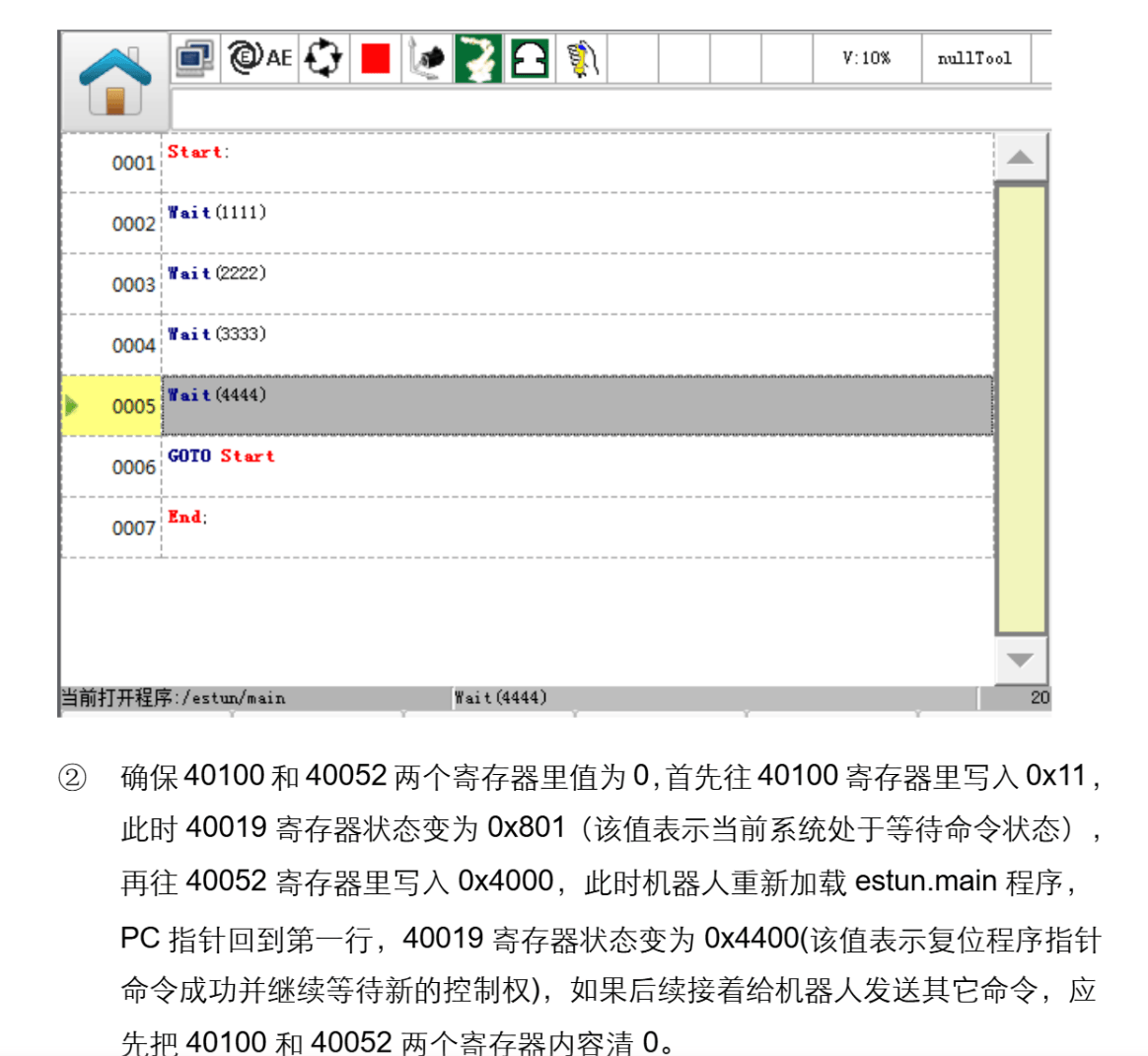
比如圖中啟動機器人要給寄存器40100寫值
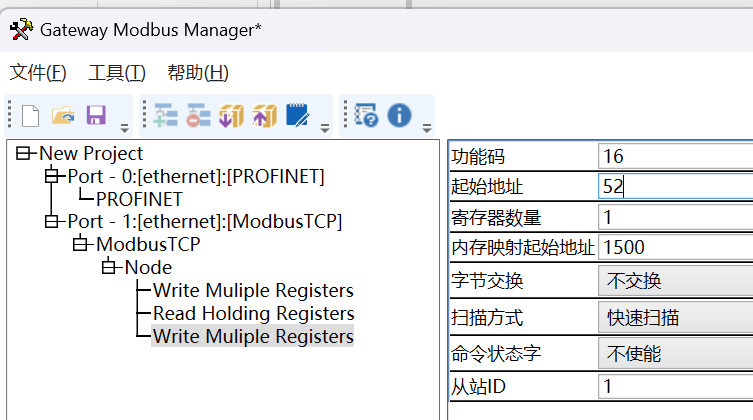
添加寫寄存器功能碼并寫入地址100
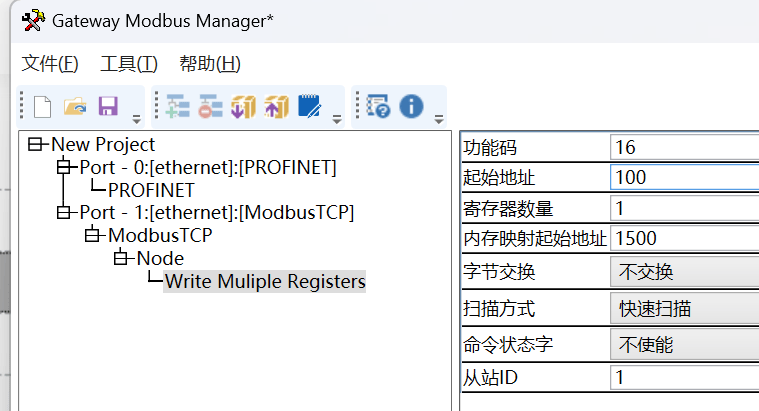
默認內存映射地址對應PLC的Q地址分配的起始地址。
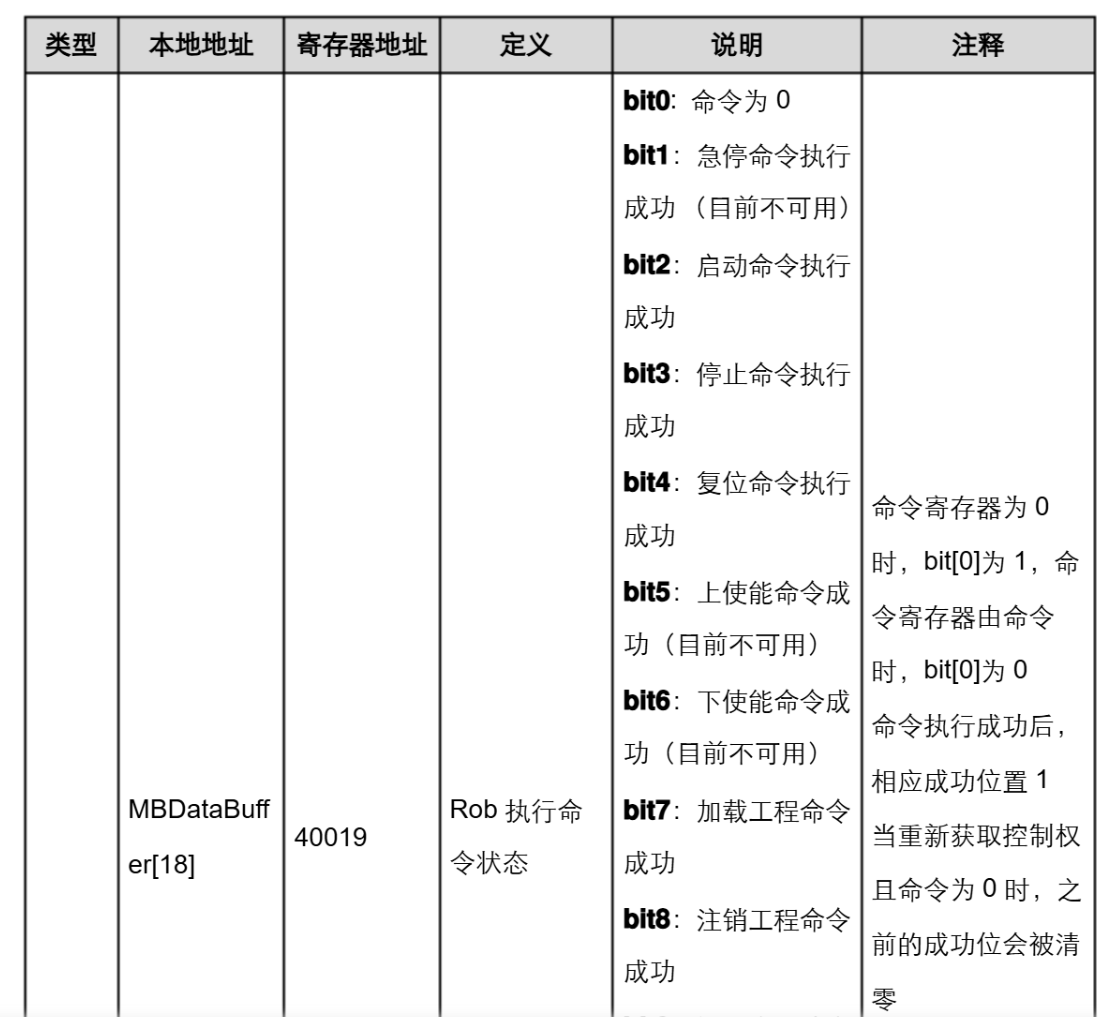
再讀取40019數值和讀取40052
下載配置到網關即可。
PLC配置
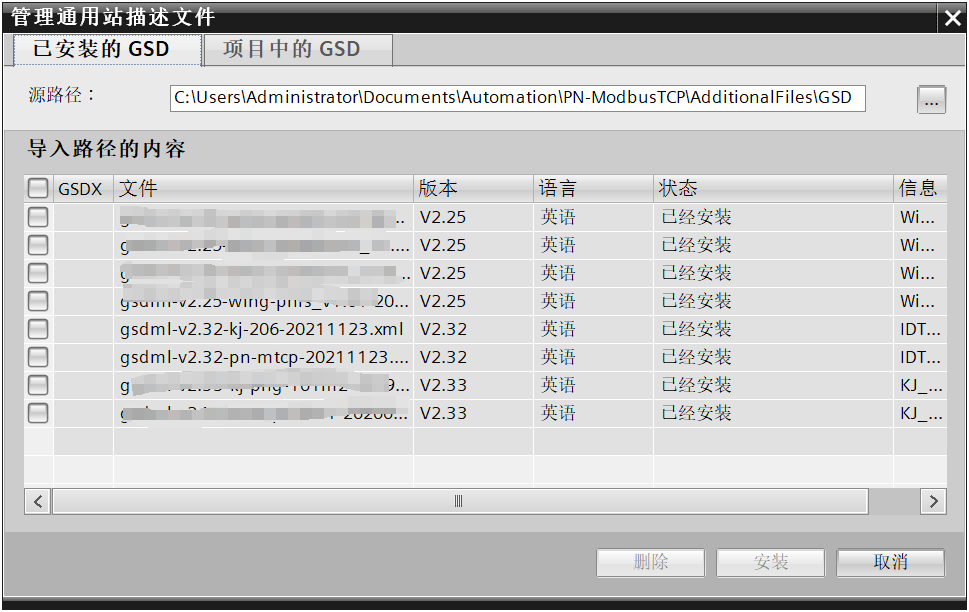
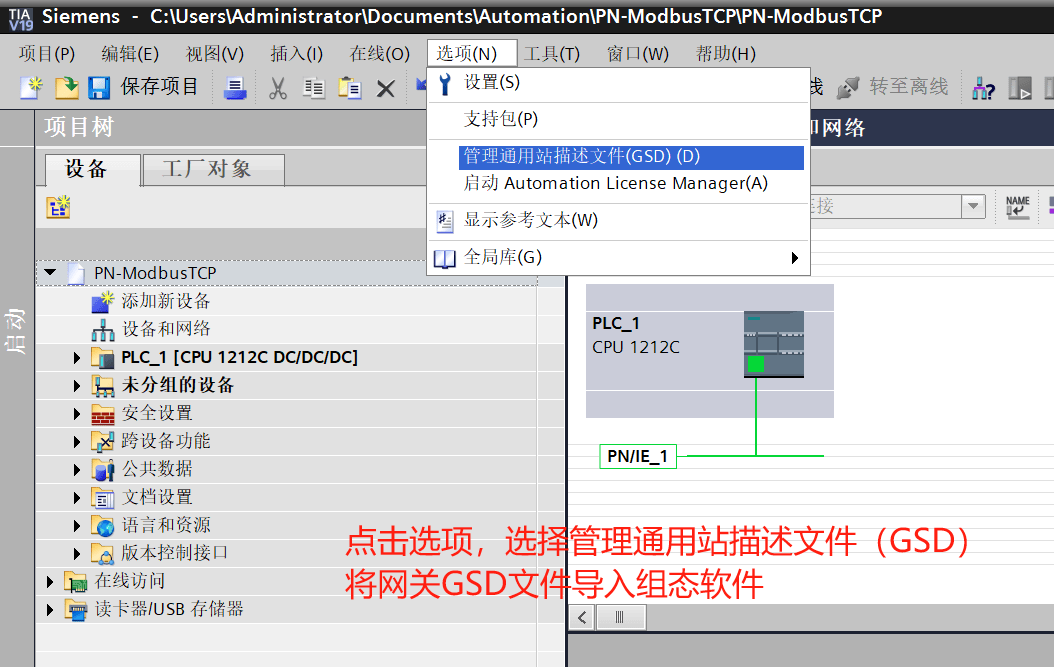
打開西門子PLC組態軟件博圖設置網關Profinet一側的參數配置,首先導入網關GSD文件并設置PLC的IP地址
在網絡視圖中點擊模塊,設置網關的IP地址和設備名稱
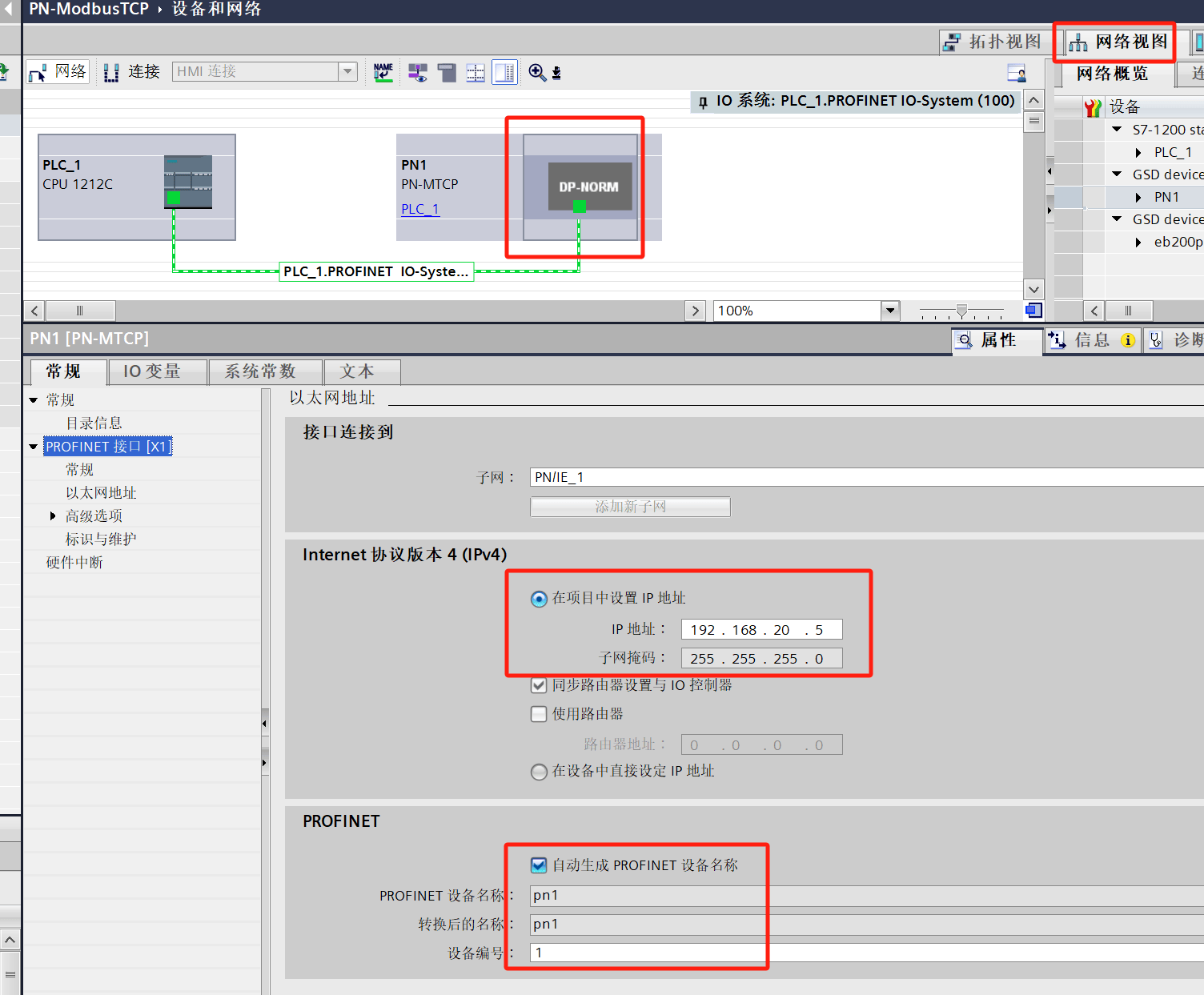
添加網關用到的數據輸入輸出長度
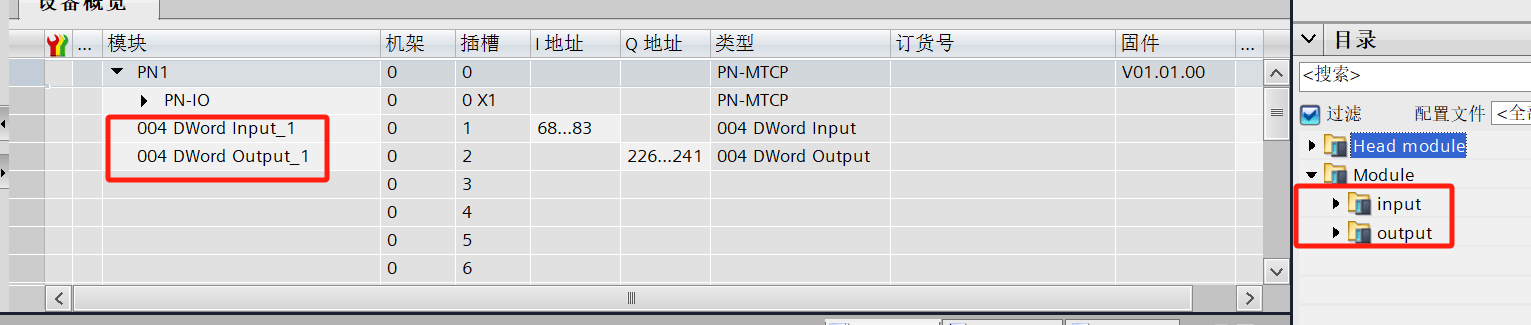
設置好分配的IQ地址,確認無誤后下載到PLC
到此網關通訊配置全部完成,所有設備全部上電即可正常工作。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
網關
+關注
關注
9文章
6767瀏覽量
56249 -
ModbusTCP
+關注
關注
0文章
255瀏覽量
5493
發布評論請先 登錄
相關推薦
熱點推薦
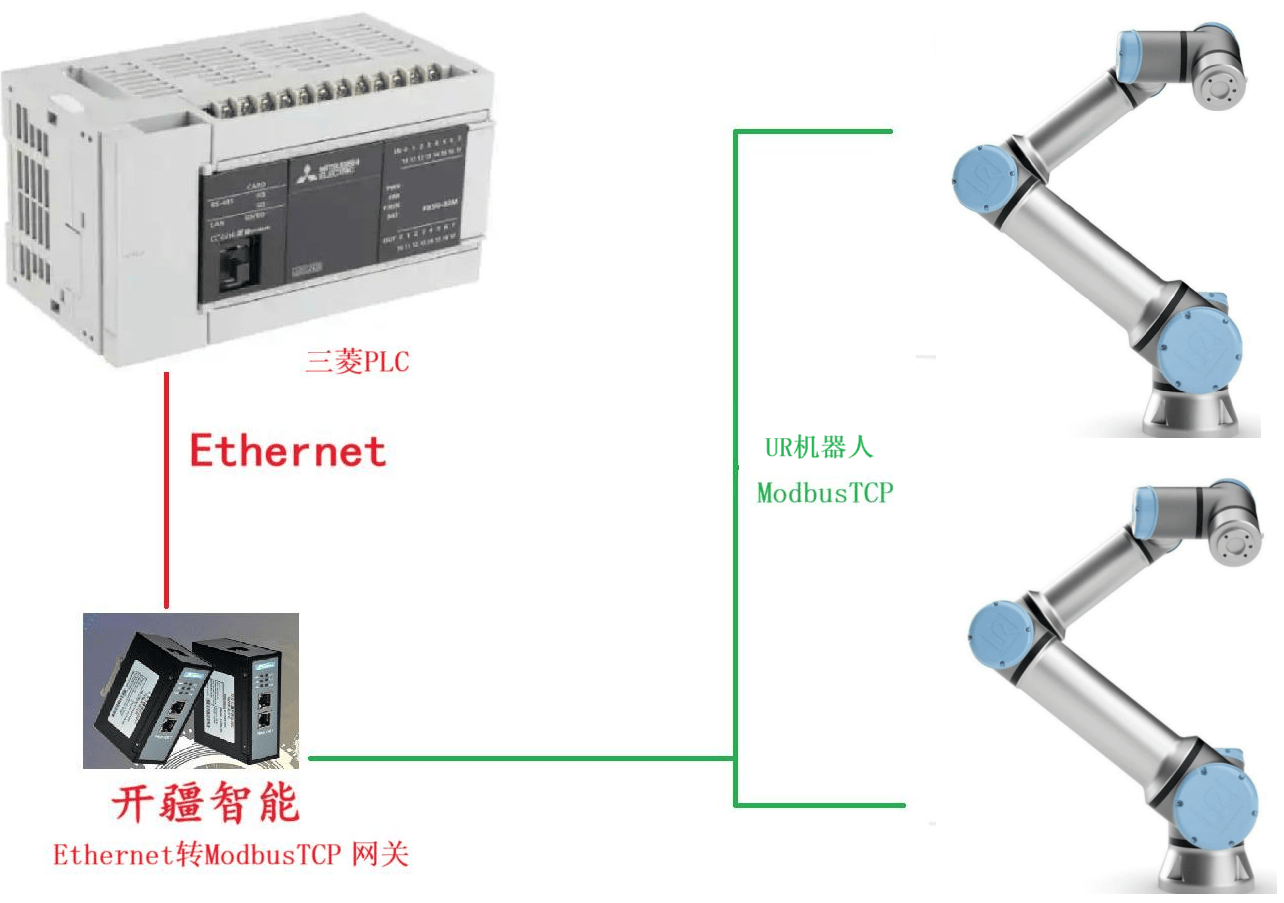
開疆智能Ethernet轉ModbusTCP網關連接UR機器人配置案例
本案例是三菱PLC通過Ethernet轉ModbusTCP網關連接UR機器人的配置案例,具體配置
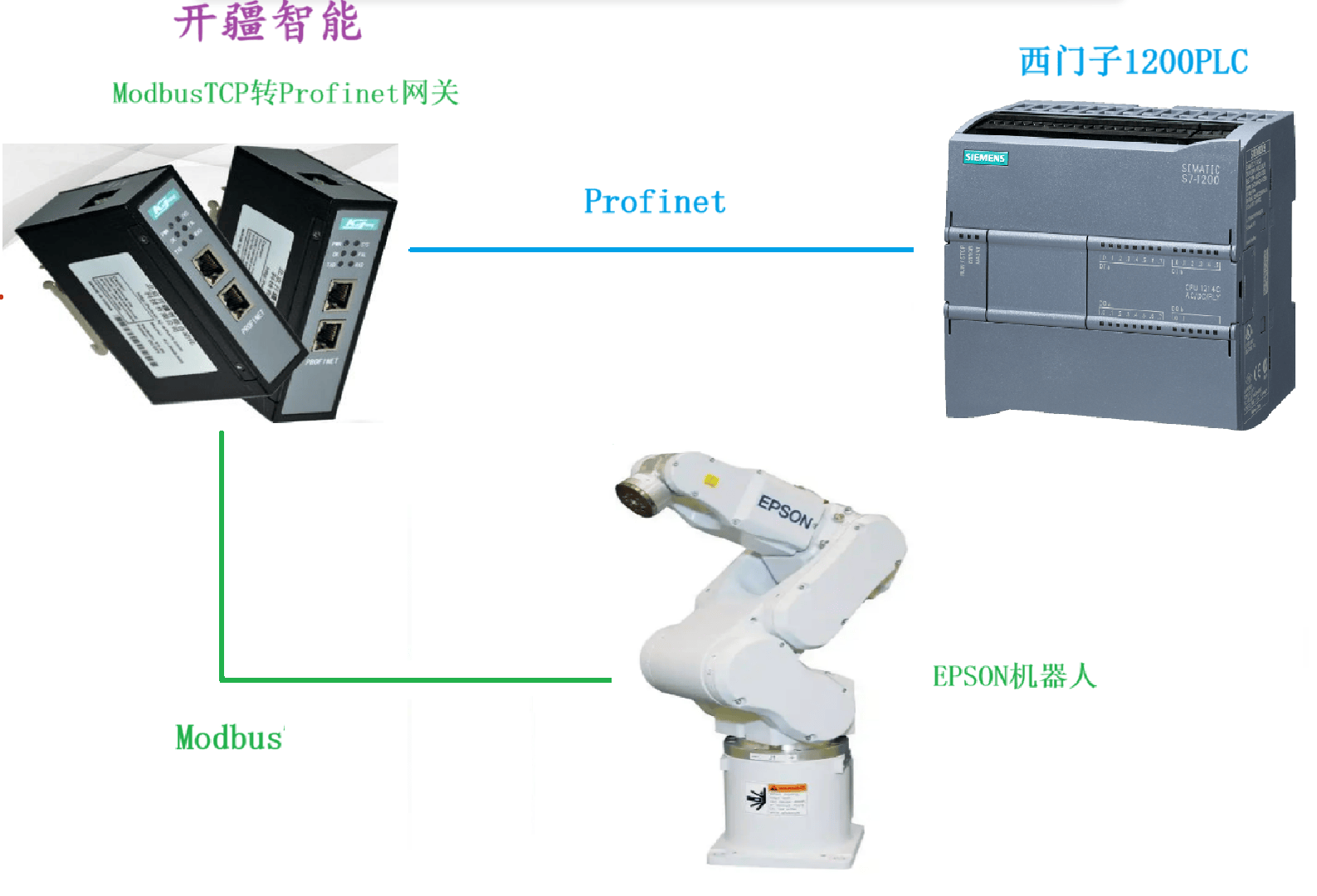
開疆智能ModbusTCP轉Profinet網關連接EPSON機器人配置案例
配置過程: 首先連接好機器人的TCP參數。 設置好IP后打開網關配置軟件進行ModbusTCP客
開疆智能ModbusTCP轉Profient網關連接西門子PLC與川崎機器人配置案例
本案例是西門子PLC與川崎機器人通過Profient轉ModbusTCP網關進行通訊轉換的配置案
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例
本案例是ModbusTCP主站通過開疆智能ModbusTCP轉Devicenet網關連接發那科

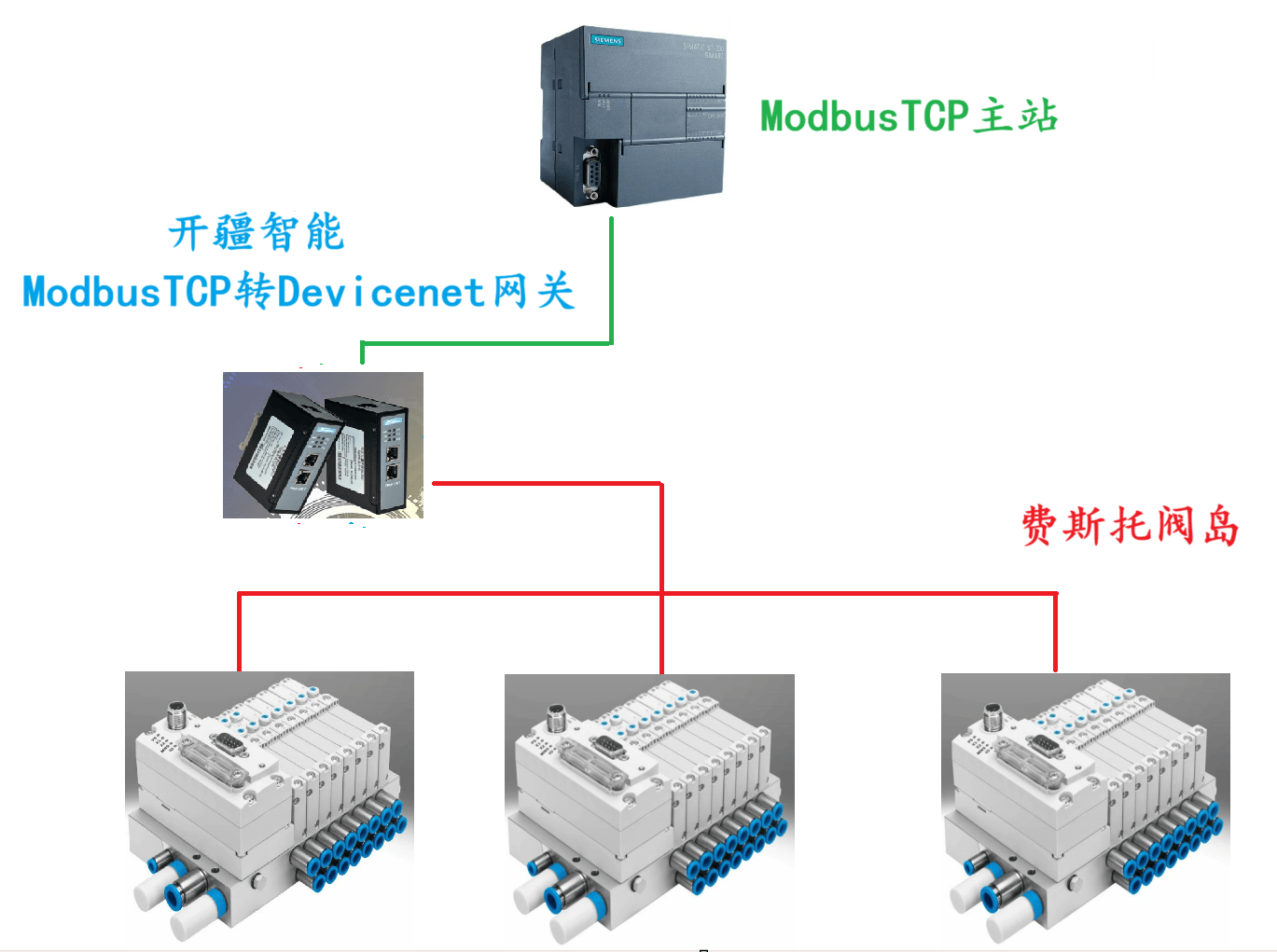
開疆智能Devicenet轉ModbusTCP網關連接費斯托閥島配置案例
本案例是ModbusTCP主站PLC通過開疆智能研發的Devicenet主轉ModbusTCP網關連接
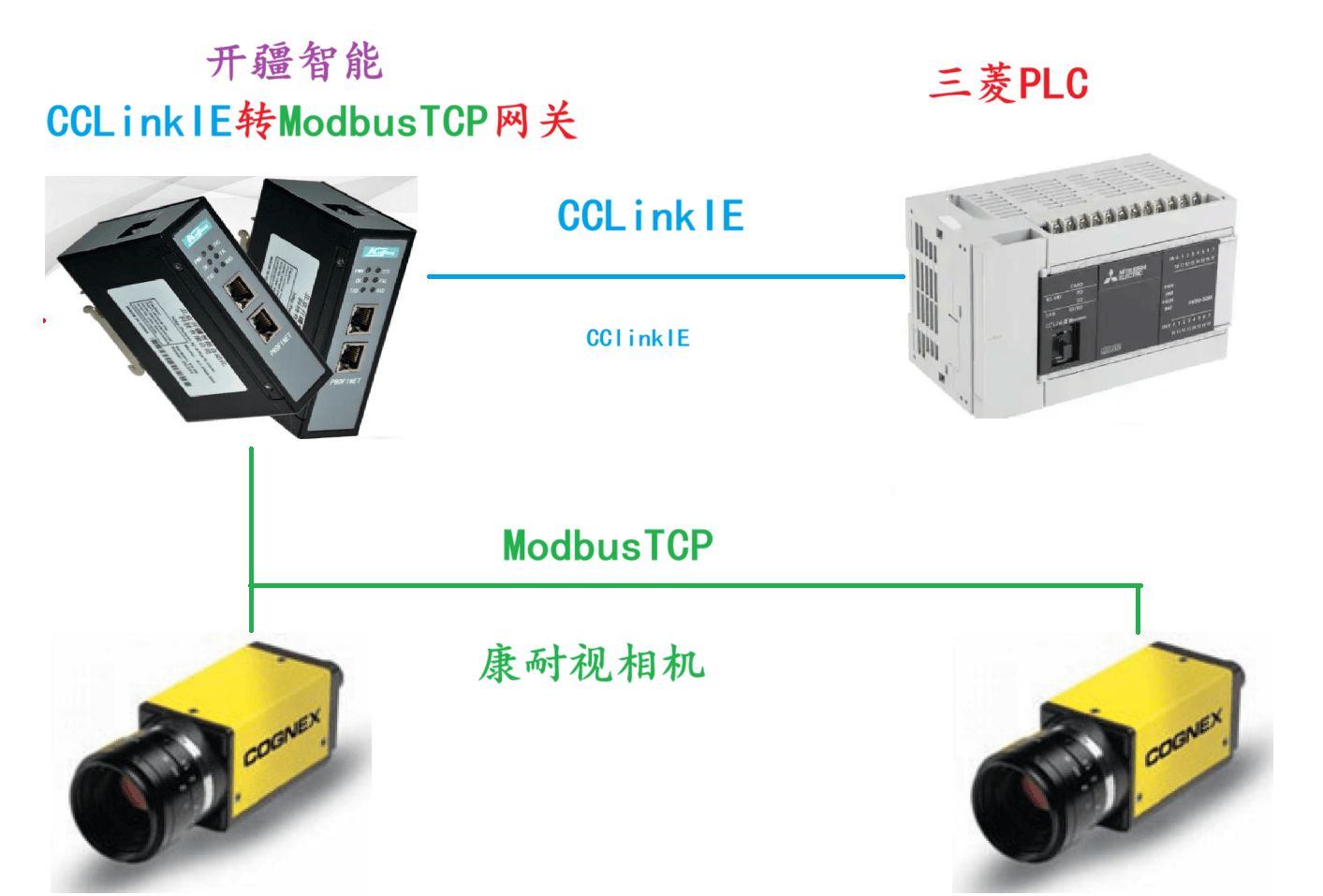
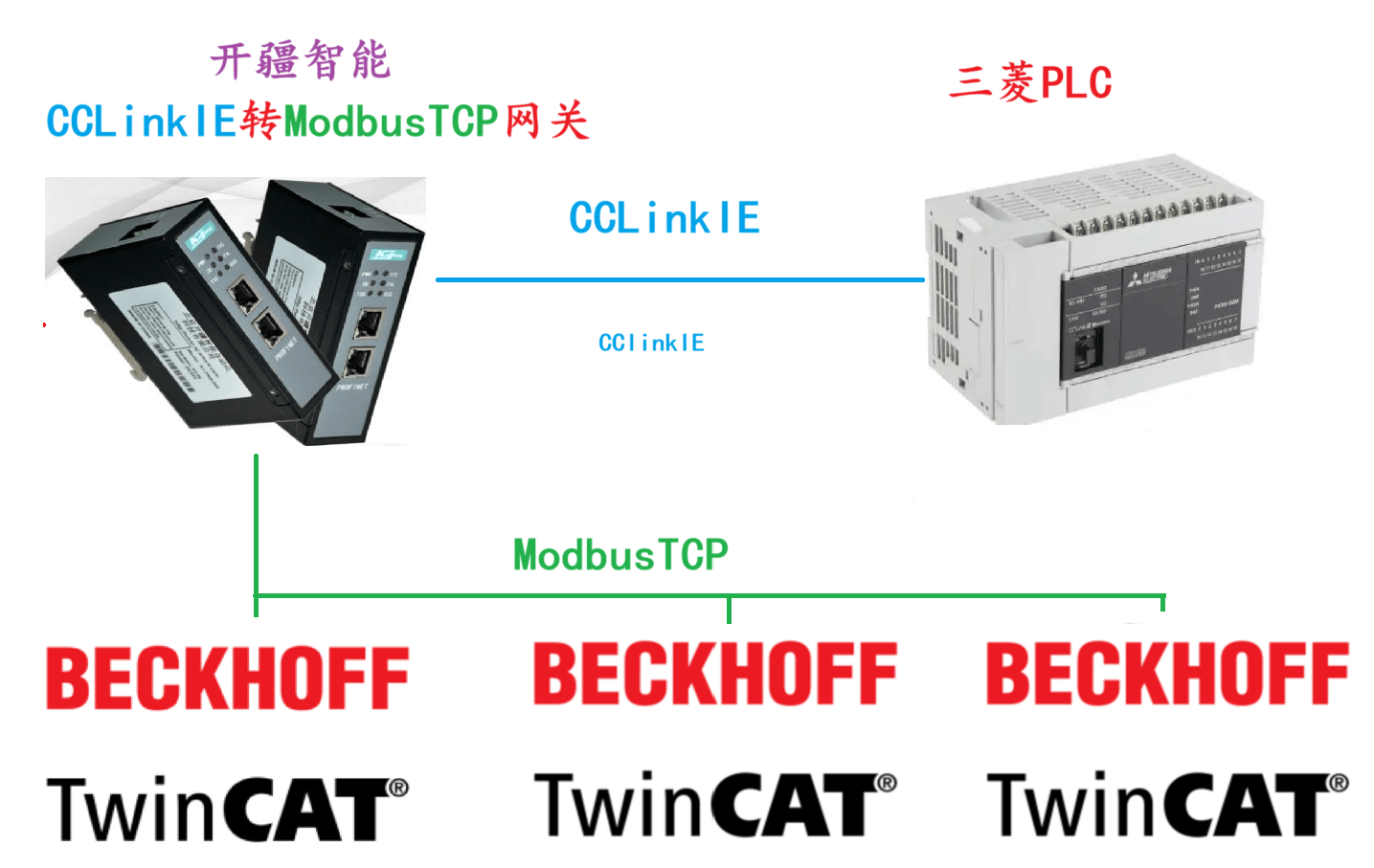
開疆智能CCLinkIE轉ModbusTCP網關連接康耐視InSight相機案例
開疆智能CCLinkIE轉ModbusTCP網關連接康耐視InSight相機案例
開疆智能CCLinkIE轉ModbusTCP網關連接傲博機器人配置案例
本案例是通過CClinkIE轉ModbusTCP網關,連接傲博機器人的配置案例。
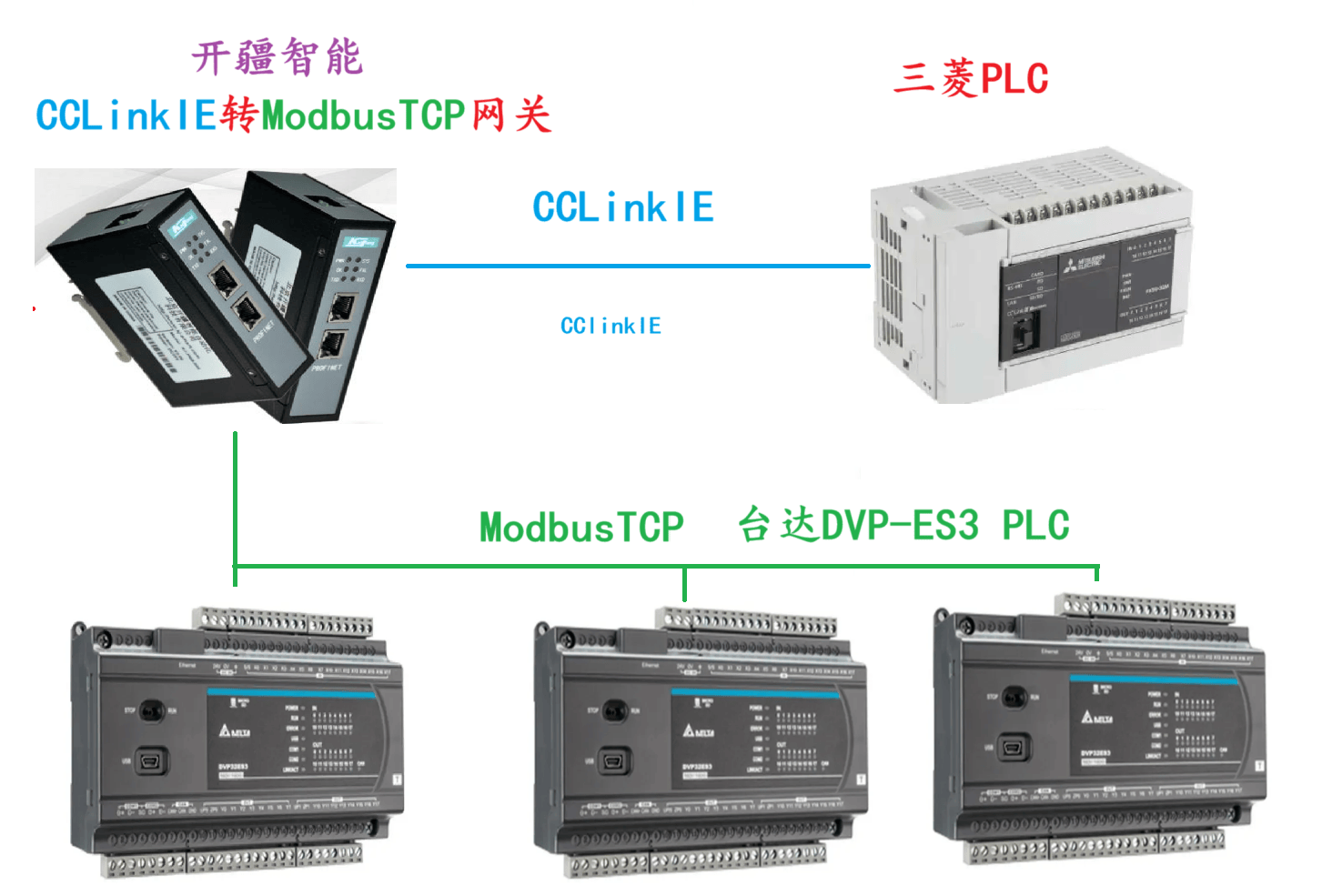
開疆智能ModbusTCP轉CClinkIE網關連接臺達DVP-ES3 PLC配置案例
本案例是通過開疆智能研發的ModbusTCP轉CClinkIE網關連接臺達DVP-ES3 PLC的配置
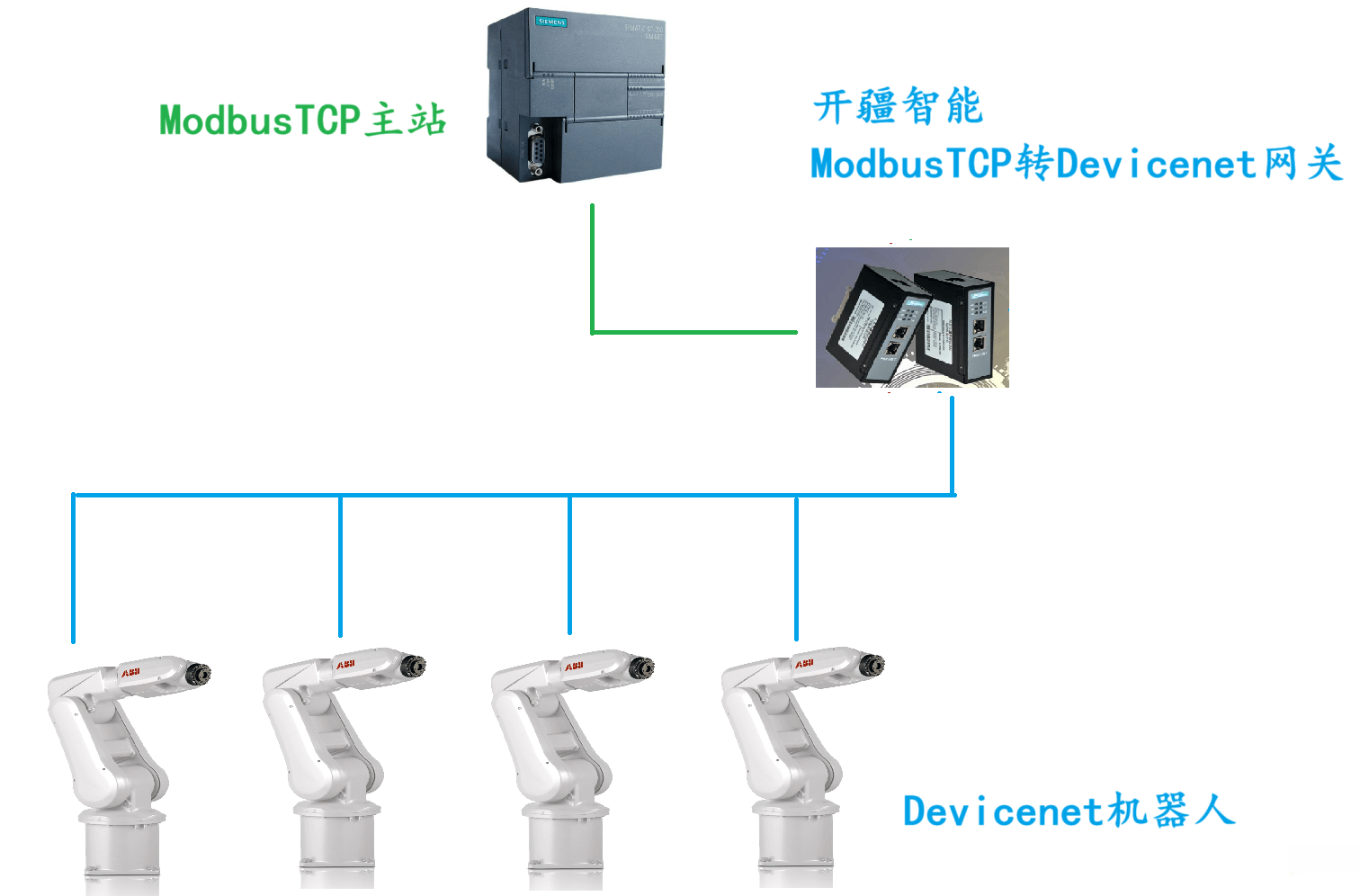
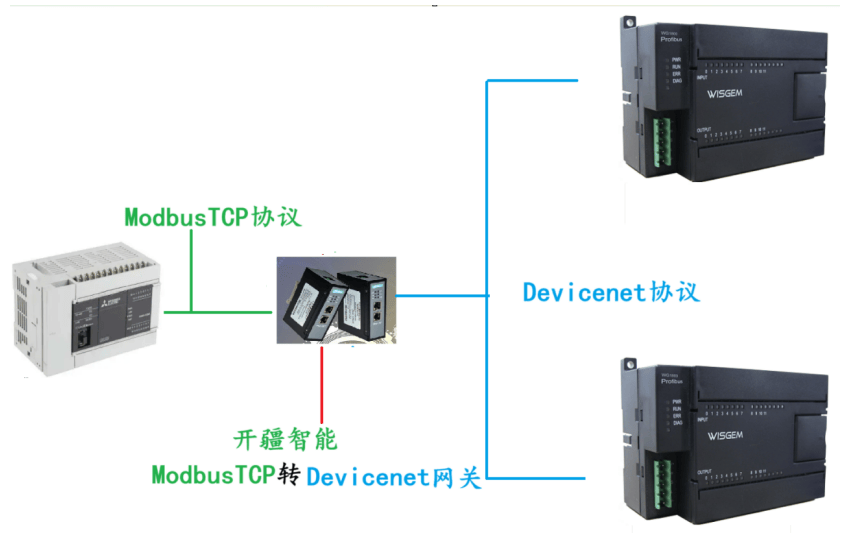
開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例
本案例是三菱PLC通過開疆智能ModbusTCP轉Devicenet網關連接ABB機器人的

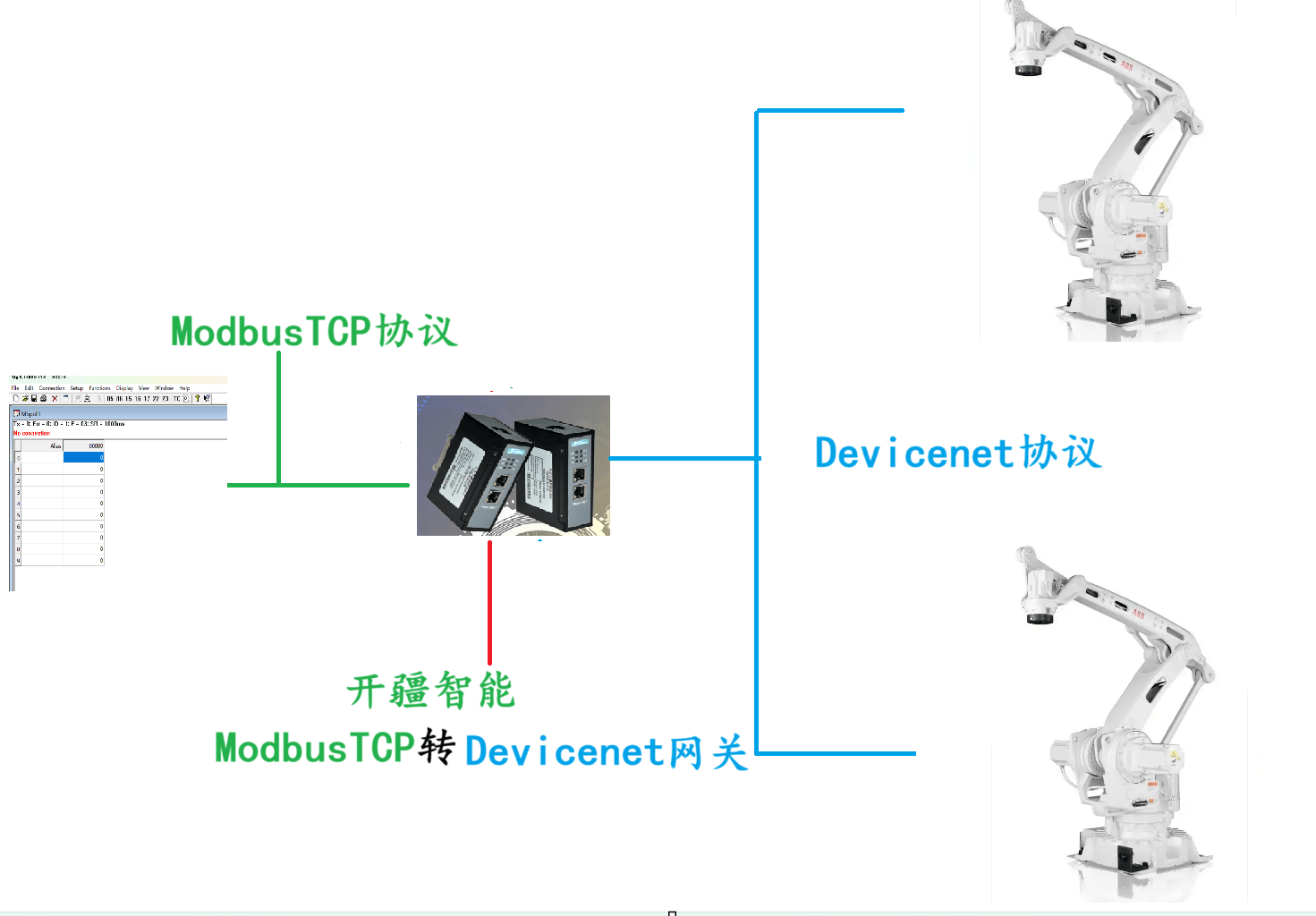
開疆智能ModbusTCP轉Devicenet網關連接ABB機器人配置案例
本案例是模擬ModbusTCP主站軟件通過開疆智能ModbusTCP轉Devicenet網關連接
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例
本案例是通過開疆智能Profinet轉ModbusTCP網關將西門子PLC與ABB機器人進行通訊

開疆智能Profinet轉ModbusTCP網關連接BORUNTE伯朗特系統配置案例
本案例是通過開疆智能Profinet轉ModbusTCP網關將西門子PLC與BORUNTE機器人
開疆智能Profinet轉ModbusTCP網關連接WINCC配置案例
Wincc上位機軟件開疆智能Profinet轉ModbusTCP網關通過Modbus TCP/IP通信,將PLC集到的參數通過



 工商網監
工商網監
評論