") FMCW激光雷達(dá),工業(yè)應(yīng)用新進(jìn)展
FMCW激光雷達(dá),工業(yè)應(yīng)用新進(jìn)展

電子發(fā)燒友網(wǎng)報(bào)道(文/梁浩斌)FMCW激光雷達(dá)有了新進(jìn)展。近日FMCW激光雷達(dá)廠商Aeva宣布,通過與SICKAG和LMI等工業(yè)自動(dòng)化領(lǐng)域領(lǐng)導(dǎo)者合作,其應(yīng)用于工業(yè)自動(dòng)化的高精度傳感器Eve1系列獲得了首批超過1000個(gè)訂單。Aeva表示,這些項(xiàng)目反映了公司在4D激光雷達(dá)技術(shù)之外,成功拓展到不斷增長(zhǎng)的工業(yè)自動(dòng)化市場(chǎng)。
Eve1D是Aeva在4月29日推出的業(yè)界首款基于FMCW技術(shù)的激光位移傳感器,專為大批量和在線工業(yè)自動(dòng)化應(yīng)用設(shè)計(jì)。
激光位移傳感器正在重新定義現(xiàn)代生產(chǎn)環(huán)境中的精密測(cè)量。他們使用激光束測(cè)量傳感器和目標(biāo)表面之間的距離,沒有物理接觸。這些傳感器專為高速、非接觸式操作而設(shè)計(jì),測(cè)量精度低至微米級(jí),約為人類頭發(fā)厚度的1/100。這些傳感器通常用于工業(yè)自動(dòng)化、質(zhì)量控制和精密制造,制造商可以利用它們來測(cè)量元件的厚度、高度或位置,監(jiān)控運(yùn)動(dòng)部件的速度或振動(dòng),以及檢查制造過程中的平整度或翹曲。
Eve1D基于Aeva的CoreVision片上激光雷達(dá)模塊,在滿足汽車應(yīng)用嚴(yán)格可靠性的同時(shí),針對(duì)高精度檢測(cè)進(jìn)行了微調(diào),每個(gè)模塊都是利用硅光技術(shù),在硅片上集成關(guān)鍵傳感器元件而構(gòu)建的。結(jié)合Aeva專有的精密傳感軟件,Eve1D提供了一種可擴(kuò)展的軟件定義產(chǎn)品,擺脫了行業(yè)標(biāo)準(zhǔn)激光三角測(cè)量技術(shù)在性能、成本和外形方面的限制。
性能上,Eve1D傳感器被設(shè)計(jì)用于測(cè)量低至亞微米級(jí)的精度,可以在100mm到20m的范圍內(nèi)工作,精度為百萬分之100。
相比傳統(tǒng)的三角測(cè)量或基于TOF的測(cè)量,Eve1D使用的FMCW測(cè)量技術(shù)優(yōu)勢(shì)包括:
- 適應(yīng)不同材料:超高動(dòng)態(tài)范圍可在各種材料和表面類型(反射、透明或深色)上提供可靠的精度,無縫過渡且無偽影;
- 不受環(huán)境光或傳感器干擾的影響:非常適合任何照明環(huán)境、戶外使用或高密度傳感環(huán)境;
- 無遮擋測(cè)量:獨(dú)特的同軸激光束設(shè)計(jì)能夠在小間隙區(qū)域進(jìn)行多功能掃描,不會(huì)遮擋或?qū)呙璺较虿幻舾?/span>;
- 精確的振動(dòng)和速度測(cè)量:精確捕捉徑向速度,擴(kuò)展功能,包括振動(dòng)測(cè)量和測(cè)速,以精確測(cè)量風(fēng)扇和軸等旋轉(zhuǎn)部件的振動(dòng),并檢測(cè)傳送帶等移動(dòng)部件的速度。
Aeva的聯(lián)合創(chuàng)始人兼首席技術(shù)官M(fèi)inaRezk表示:“我們的Eve1系列傳感器基于Atlasautomotive4D激光雷達(dá)產(chǎn)品中的相同核心FMCW技術(shù),為Aeva打開了一個(gè)全新的市場(chǎng),帶來了巨大的收入機(jī)會(huì)。Eve1D提供了性能、成本和可擴(kuò)展性的獨(dú)特組合,并消除了當(dāng)今激光位移傳感器技術(shù)的許多缺點(diǎn)。隨著全球制造業(yè)變得越來越自動(dòng)化和依賴先進(jìn)的傳感器技術(shù),這些傳感器將有助于提高質(zhì)量控制和精度。”
Aeva表示,Eve1傳感器的首批出貨已開始向特定客戶交付,預(yù)計(jì)生產(chǎn)將于2025年開始。
值得一提的是,作為專注FMCW激光雷達(dá)賽道的廠商,Aeva在商業(yè)化進(jìn)度上正在加速。今年一季度,Aeva收入340萬美元,同比增長(zhǎng)超60%,實(shí)現(xiàn)創(chuàng)紀(jì)錄的產(chǎn)品收入。
-
工業(yè)
+關(guān)注
關(guān)注
3文章
2394瀏覽量
49253 -
FMCW
+關(guān)注
關(guān)注
9文章
112瀏覽量
24368 -
激光雷達(dá)
+關(guān)注
關(guān)注
981文章
4505瀏覽量
196737
發(fā)布評(píng)論請(qǐng)先 登錄
固態(tài)激光雷達(dá)參數(shù)以及避障視頻
4D點(diǎn)云加持,FMCW激光雷達(dá)助力自動(dòng)駕駛更安全可靠

調(diào)頻連續(xù)波(FMCW)為什么是自動(dòng)駕駛激光雷達(dá)的未來?

FMCW和ToF激光雷達(dá),哪種更適合自動(dòng)駕駛?
【科研動(dòng)態(tài)】新一代集成光子FMCW激光雷達(dá)光源的設(shè)計(jì)框架與性能權(quán)衡

從原理到量產(chǎn):FMCW激光雷達(dá)的核心技術(shù)體系與突破方向

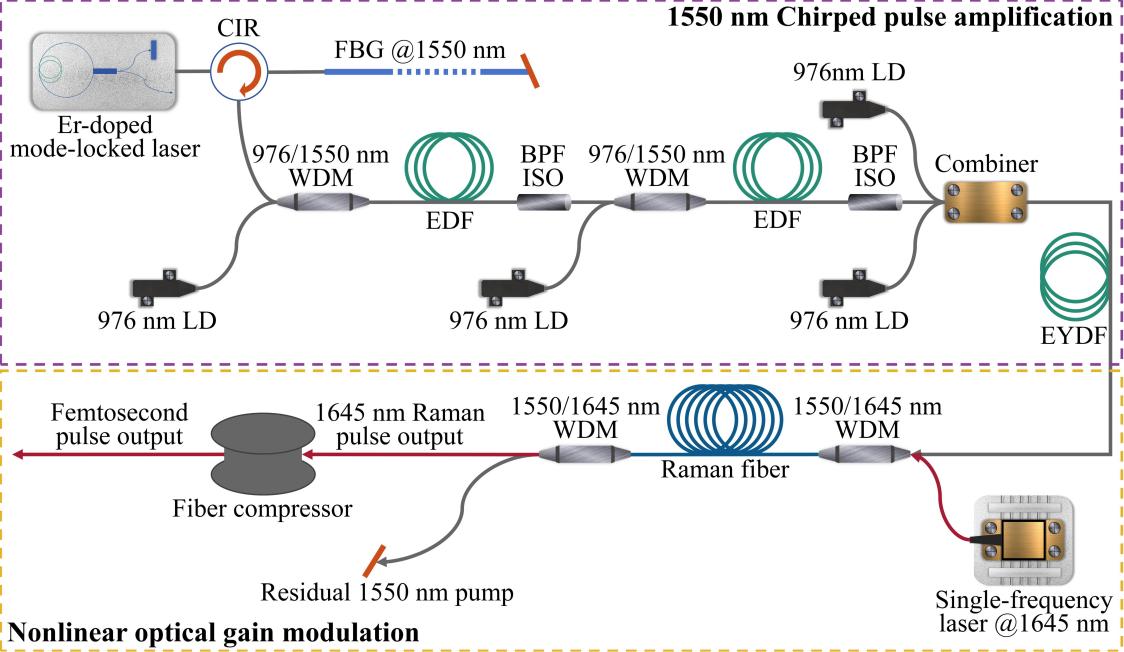
上海光機(jī)所在高功率U波段飛秒激光方面取得新進(jìn)展
硅光加持下的感知革命:FMCW 激光雷達(dá)技術(shù)全景解讀
全球體積最小4D FMCW激光雷達(dá)亮相!

激光雷達(dá)為什么會(huì)出現(xiàn)串?dāng)_的問題?

洛微科技攜4D FMCW激光雷達(dá)與3D感知方案閃耀光博會(huì),引領(lǐng)行業(yè)新趨勢(shì)

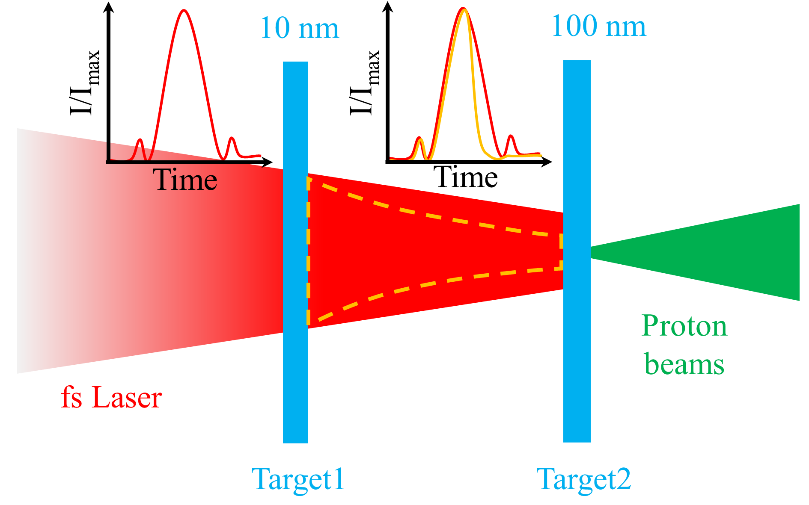
上海光機(jī)所在激光驅(qū)動(dòng)離子加速方面取得新進(jìn)展



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論