 FMCW和ToF激光雷達,哪種更適合自動駕駛?
FMCW和ToF激光雷達,哪種更適合自動駕駛?

[首發于智駕最前沿微信公眾號]在自動駕駛系統里,激光雷達被視為最重要的感知硬件,其通過激光探測前方路況的具體情況,并生成三維信息。正因為它看得“準”,圍繞激光雷達的技術路線一直是自動駕駛領域長期爭論的話題。其中ToF和FMCW這兩種測距方式常被拿來討論。它們都能讓激光雷達“看見”距離,但底層原理、性能邊界以及對自動駕駛系統的意義卻并不相同。
什么是ToF和FMCW?
自動駕駛系統中的激光雷達(LiDAR),本質上是用光來感知周圍的世界。它不斷向周圍發射激光束,當激光遇到物體反射回來,系統接收這些回光,就能計算出物體的位置和距離。目前激光雷達最常見的兩種測距方式就是ToF(飛行時間法)和FMCW(調頻連續波)。
ToF是一種基于時間測量的方法。它發射一束短暫的激光脈沖,然后精確計算這束光從發出到返回的時間,就可以探測障礙物的距離和位置。由于光速是已知的,根據時間差就能直接算出距離。這就像在山谷里大喊一聲,通過聽到回聲的時間來判斷山壁有多遠,只不過這里用的是光而不是聲音。
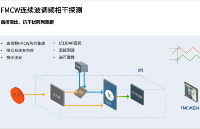
FMCW則采用了不同的思路,它不發射激光脈沖,而是持續發射頻率連續變化的激光。通過對比發射頻率和接收到的反射頻率之間的差異,不僅能計算出距離,還能直接獲取物體的速度信息。這種思路其實和車上常用的毫米波雷達類似,只不過將無線電波換成了激光。
這兩種技術為激光雷達提供了兩套不同的感知方案,一個靠測量時間,一個靠分析頻率,各有千秋。那么在實際的自動駕駛應用中,它們誰更勝一籌?各自又有哪些優勢和局限呢?
ToF激光雷達:成熟、簡單、但有明顯局限
目前,絕大多數商用自動駕駛輔助系統(ADAS)及部分自動駕駛方案采用的都是ToF激光雷達。這主要得益于該技術成熟度高、供應鏈完善且成本相對較低。它的運作方式直觀,簡單概括就是發脈沖、測時間、算距離,系統硬件設計相對簡單,量產性能穩定。這也是為什么很多車企現階段用的激光雷達都是ToF技術的原因。
ToF激光雷達的優勢在于設計和制造難度相對較低,其核心的光源和探測器組件在業內已經非常成熟。它能實現較高的點云密度與分辨率,這對自動駕駛所需的環境精細感知至關重要。目前,市面上多數ToF激光雷達在測距能力、視場角、點云質量等方面已能夠滿足自動駕駛系統的基本需求。特別是在成本與量產方面,ToF已形成成熟的供應鏈,單價從早期的數萬元乃至更高,大幅降至幾百到幾千元級別,有力推動了自動駕駛傳感器的普及應用。
簡單實用并不意味著完美,ToF激光雷達也存在很多問題。ToF激光雷達測距范圍與性能受到激光功率和人眼安全規范的限制。由于人眼安全標準嚴格約束了發射能量,主流ToF激光雷達多采用905納米波段的短脈沖激光,導致其在探測遠距離、低反射率物體(如黑色輪胎、遠處行人)時表現吃力。高階自動駕駛一般需要200米以上的有效探測距離以提升安全冗余,這對ToF系統而言并不容易實現。
ToF激光雷達還會出現所謂的“耀斑效應”或光暈現象。當激光照射到高反射表面(如交通標志、反光背心)時,回波信號過強,容易使接收器飽和,從而淹沒其他真實信號,導致點云中出現局部失真或虛假數據。盡管可通過算法濾波進行緩解,但該問題難以根本消除。
此外,ToF系統在多個激光雷達同時工作的場景中,易受到相互間的干擾。尤其在車流密集時,其他車輛發射的激光脈沖可能引發誤檢測或噪聲。雖然已有編碼調制、頻率跳變等技術用于區分信號,但ToF在抗干擾能力上并不具備先天優勢。
FMCW激光雷達:技術前沿的“潛力股”,但還沒真正全面成熟
相較于ToF,FMCW激光雷達則采用了另一種測距原理。它持續發射頻率隨時間規律變化的連續激光,通過比較發射信號與回波信號的頻率差異,不僅能計算出目標的距離,還能直接獲取其徑向速度。這項技術在雷達領域已應用多年,但在激光雷達中仍屬較新的發展方向。
FMCW的一個顯著優勢在于其天生具備測速能力,無需像ToF那樣依賴多幀點云對比來推算速度。這對自動駕駛感知意義重大,系統可在單次掃描中直接區分靜止與運動物體,并獲取精確的速度信息,從而為應對行人、車輛等動態目標的快速接近提供更及時的數據支持。
此外,基于頻率調制的特性,FMCW在接收端可通過與本地參考信號進行混頻,實現對微弱回波信號的放大與提取。這種處理方式提升了系統對遠距離、低反射率物體的探測靈敏度。FMCW的信號處理方法本身還具有一定的抗干擾潛力,在應對強光或其他光源干擾時會表現得更穩定。
當然,與成熟的ToF方案相比,FMCW并不是那么容易落地。其系統構成更為復雜,需要高度線性的頻率調制、精密的本地振蕩器以及復雜的模擬與數字信號處理鏈路。想要將其應用到車端,這些組件不僅需滿足車規級可靠性與穩定性要求,還要在大規模量產中保持一致性,實現難度和成本顯著高于ToF。
FMCW對信號處理的要求也更高。為準確提取距離與速度信息,系統需運行更復雜的算法,并依賴高速模數轉換器與高性能處理單元,這不僅增加了硬件成本,也對功耗和散熱提出了更高要求。在車載資源受限且可靠性要求嚴苛的環境中,這些因素都影響著技術的實用化進程。
目前真正達到車規級量產、具備穩定供應能力的FMCW產品仍然寥寥。相關技術尚處于發展完善階段,供應鏈體系與成本控制能力仍未完全成熟,因此短期內難以全面替代ToF。
誰將贏得未來?
從前面的介紹中,其實已經可以很明顯地得出ToF現階段更具優勢的結論,那就聊聊未來誰會更具優勢吧!之所以現階段大部分部署在生產車上的激光雷達采用ToF方案,是因為它更成熟、量產能力更強、成本更合理,足以支持大部分自動駕駛功能。車輛制造商和供應鏈都對這種技術非常熟悉,這意味著它可以實現大規模部署。
FMCW激光雷達憑借其理論上的速度測量能力、對弱目標的敏感性以及潛在的抗干擾性能,在一些高端自動駕駛研發項目里受到關注。它更像是一種遠期愿景技術,未來隨著成熟度提升、生產規模放大后或將逐步進入市場。
未來可能出現的其實是一種分層感知架構,ToF激光雷達負責常規三維感知任務,而某些高級自動駕駛平臺可能進一步結合FMCW激光雷達或類似技術來加強速度測量、性能冗余等功能。
從產業發展趨勢來看,沒有一種技術可以徹底“淘汰”另一種技術,更可能是融合與演進。ToF在短期內依然是主流,而FMCW則有可能在一些高要求應用或者結合更高集成水平的車載感知系統里發揮更大的作用。
總的來說,ToF激光雷達是目前自動駕駛感知的“主力軍”,因為它成熟、可靠、可量產,并且性能已經能夠滿足絕大多數使用場景。FMCW激光雷達則代表了未來更高性能的方向,具有速度探測和潛在更強抗干擾的優勢,但要真正覆蓋市場,仍待技術進一步成熟、成本持續下探與產業鏈全面完善。
-
FMCW
+關注
關注
9文章
109瀏覽量
24331 -
激光雷達
+關注
關注
979文章
4460瀏覽量
196344 -
TOF
+關注
關注
9文章
544瀏覽量
38421 -
自動駕駛
+關注
關注
793文章
14852瀏覽量
179369 -
激光脈沖
+關注
關注
0文章
89瀏覽量
10645
發布評論請先 登錄
【科研動態】新一代集成光子FMCW激光雷達光源的設計框架與性能權衡

自動駕駛激光雷達會傷害人體嗎?

從原理到量產:FMCW激光雷達的核心技術體系與突破方向

硅光加持下的感知革命:FMCW 激光雷達技術全景解讀
激光雷達為什么會出現串擾的問題?

自動駕駛里的激光雷達有何作用?

決定自動駕駛激光雷達感知質量的因素有哪些?

自動駕駛只用激光雷達進行感知會有哪些問題?
FMCW激光雷達,加速落地工業場景
機械、半固態、全固態激光雷達有何區別?誰更適合自動駕駛?

自動駕駛激光雷達之間會相互干擾嗎?
FMCW激光雷達,工業應用新進展
激光雷達在自動駕駛領域中的優勢

愛普生高精度車規晶振助力激光雷達自動駕駛

激光雷達技術:自動駕駛的應用與發展趨勢




 工商網監
工商網監
評論