 從原理到量產:FMCW激光雷達的核心技術體系與突破方向
從原理到量產:FMCW激光雷達的核心技術體系與突破方向

在自動駕駛感知技術領域,激光雷達作為核心傳感器之一,正經歷從傳統ToF方案向更先進技術形態的迭代。FMCW(Frequency Modulated Continuous Wave,調頻連續波)激光雷達憑借其獨特的相干檢測原理,在測距精度、測速能力、抗干擾性等關鍵性能上實現了質的飛躍,被業內公認為車載激光雷達的終極形態。本文將從技術原理、核心優勢、關鍵技術及產業布局等維度,深度解析FMCW激光雷達的技術內核與發展前景。
一、技術原理:相干檢測的底層邏輯
激光雷達的測量方式主要分為直接飛行時間(dToF)和間接飛行時間(iToF)兩類,FMCW 激光雷達是iToF技術中最成熟且應用最廣泛的實現形式。其核心原理與毫米波雷達類似,通過頻率調制與相干檢測實現距離和速度的同步測量,但在測角原理上存在本質差異。
1.1 核心測量機制
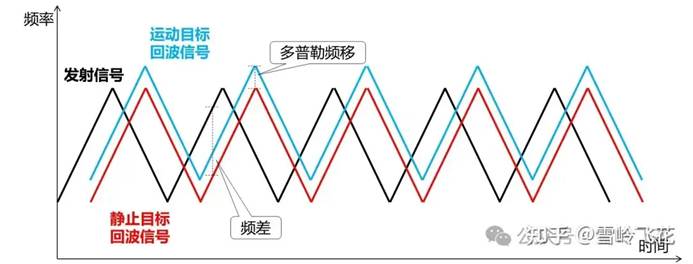
FMCW 激光雷達通過激光器發射頻率隨時間線性變化的連續激光信號,該信號經目標反射后形成回波,與本地保留的本振光信號在探測器中發生相干混頻,產生拍頻信號。通過分析拍頻信號的頻率差,可計算出目標的距離信息;同時利用多普勒頻移效應,直接提取目標的徑向速度數據。這種“一次探測雙參數獲取”的特性,使其無需像ToF激光雷達那樣通過多幀點云匹配推算速度,大幅提升了動態目標的感知效率。
1.2 與 ToF 技術的本質區別
ToF激光雷達依賴測量激光脈沖的飛行時間差計算距離,速度信息需通過多幀點云的位置變化間接推導,存在延遲大、精度低的問題。而 FMCW 激光雷達的相干檢測機制,使其在每個點云數據中天然包含距離和速度雙維度信息,單幀即可完成動態目標的精準識別。此外,ToF 技術采用脈沖激光,峰值功率高但平均功率低,而 FMCW 采用連續波調制,峰值功率和平均功率均處于較低水平,在人眼安全與設備兼容性上更具優勢。
1.3 測角原理的技術特性
FMCW激光雷達憑借極窄的激光波束,可通過掃描器件的角度直接計算目標方位,無需復雜算法輔助。相比之下,毫米波雷達因波束較寬,需依賴 DOA(Direction of Arrival)算法估計目標角度,測角精度和實時性均存在差距。這種技術特性使得 FMCW 激光雷達能夠同時兼顧距離、速度、角度三維度的高精度測量,形成完整的 4D 感知能力。
二、核心技術優勢:超越傳統方案的性能升級
基于獨特的技術原理,FMCW激光雷達在多項關鍵性能指標上全面超越傳統ToF激光雷達,尤其適配自動駕駛的復雜應用場景。

2.1 距離與速度測量的雙重突破
在測距性能上,FMCW激光雷達的探測距離可達300-500m,且測距精度更高,能夠精準識別遠距離小目標;而ToF 激光雷達的典型探測距離為 150-250m,在遠距離場景下性能衰減明顯。在測速方面,FMCW的直接測速機制使延遲控制在微秒級,測速精度可達0.1m/s,遠優于ToF激光雷達 5-6 幀的推算延遲和米級測速誤差。這種性能優勢在 "開門殺"、"鬼探頭" 等突發場景中尤為關鍵,可大幅縮短自動駕駛系統的反應時間。
2.2 抗干擾能力的質的飛躍
ToF 激光雷達采用非相干檢測,難以區分自身發射的激光回波與環境光、其他雷達的干擾信號,在多雷達并行工作或強光照射場景下易出現誤檢。FMCW 激光雷達通過窄線寬激光(通常在100kHz以下)和相干檢測技術,僅對特定頻率區間的回波信號進行混頻處理,可有效過濾環境光和其他雷達的干擾。即使在陽光直射等極端條件下,仍能保持穩定的目標檢測能力,抗干擾性能提升3-4個數量級。
2.3 低功率與高安全性的平衡
ToF 激光雷達的測距性能依賴峰值功率,1550nm 波段的產品峰值功率常高達 1000W 以上,雖滿足人眼安全標準,但可能對相機 CMOS 芯片等光學設備造成損傷。FMCW 激光雷達的信噪比主要由調頻線性度和激光線寬決定,與功率相關性較低,其峰值功率通常在 100mW 以下,平均功率僅為 ToF 產品的十分之一,在保障人眼安全的同時,避免了對周邊設備的潛在損害,安全裕量顯著提升。
2.4 高動態范圍與惡劣環境適應性
ToF激光雷達采用SiPM或SPAD等單光子探測器,動態范圍有限,在面對高反射目標時易出現 "Blooming"(光暈擴散)現象,導致目標輪廓失真。FMCW 激光雷達采用 PIN 探測器,動態范圍更廣,可清晰區分高反目標與低反目標,避免了高反膨脹問題。同時,相干檢測技術使其在雨雪、霧霾等惡劣天氣條件下的穿透能力更強,相比ToF激光雷達的性能衰減,FMCW 產品仍能保持穩定的探測效果,環境適應性更優。
2.5 固態化潛力與降本空間
ToF 激光雷達的光學部件與掃描模塊難以實現芯片化,限制了其小型化和低成本量產的可能性。FMCW 激光雷達可通過硅光集成技術,將激光器、探測器、掃描模塊等核心部件集成于硅基芯片中,實現真正的 "芯片化" 全固態設計。硅光集成技術的規模化應用,可大幅降低激光雷達的體積、重量和成本,為車載場景的大規模普及提供了技術基礎。
三、關鍵技術體系:實現高性能的核心支撐
FMCW 激光雷達的性能表現依賴于多項核心技術的協同突破,其中調頻激光器、掃描系統、相干接收、硅光集成及信號處理算法構成了其技術體系的核心。
3.1 調頻激光器:性能瓶頸的關鍵突破
調頻激光器是FMCW激光雷達的核心器件,其性能直接決定雷達的測距分辨率、探測距離和穩定性。高性能調頻激光器需滿足四項關鍵指標:一是較大的頻率可調范圍,決定拍頻信號的最大頻率和測距分辨率(測距分辨率ΔR與調頻帶寬 B 滿足 ΔR=c/(2B));二是較快的調頻速率,影響雷達的動態響應特性;三是極窄的線寬,線寬越窄,相干長度越長,信噪比和探測性能越優;四是高線性度的調頻特性,避免因調頻非線性導致的距離計算誤差。
目前主流的調頻激光器包括 DFB(分布式反饋)激光器、DBR(分布式布拉格反射)激光器和外調激光器。DFB 激光器具有優秀的調頻線性度和量產潛力,靜態線寬典型值為 0.6-5MHz,是當前車載 FMCW 產品的主流選擇;外調激光器雖在線性度、線寬等指標上表現更優(線寬可達 1kHz 左右),但成本較高,暫未大規模應用;DBR 激光器則在功率穩定性上具有優勢,但線寬動態展寬較差,方案復雜度較高。
3.2 掃描系統:固態化的技術路徑
FMCW 激光雷達的掃描方式主要分為 MEMS 振鏡和純固態掃描兩類,其中純固態方案因無運動部件,可靠性更高,是未來的發展方向。純固態掃描技術主要包括三種實現形式:
- 光學相控陣(OPA):通過移相器控制陣列天線的相位差,實現激光波束的電子掃描,具有分辨率高、角度靈活性強等優勢,是最具潛力的固態掃描方案。但其存在旁瓣干擾和天線數量多導致的系統復雜等問題,需通過算法優化和芯片設計改進加以解決。
- 焦平面陣列(Focal Plane Array):以不同像素作為發光源,實現多角度掃描,方案實現簡單,但分光損耗較大,探測距離受限,掃描角度固定。
- 波長色散(Wavelength Dispersion):通過棱鏡將不同波長的激光進行色散,實現角度掃描,同樣具有結構簡單的優勢,但需搭配寬譜激光器,技術難度較大,掃描角度有限。
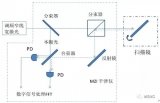
3.3 相干接收與信號處理:微弱信號的精準解析
FMCW 激光雷達的接收系統采用平衡光電探測器構建相干接收器,需配合低噪聲光信號處理(OSP)電路,實現微弱回波信號的精準檢測。由于回波信號經長距離傳輸后強度較弱,相干接收技術通過本振光與回波光的混頻放大,可顯著提升信號檢測的靈敏度,使信噪比相比 ToF 技術提升3-4個數量級。
在信號處理方面,FMCW 激光雷達對 ADC 轉換速率的要求是 ToF 產品的2-4倍,需通過超高速 FFT 轉換實現拍頻信號的頻率解析。專用數字信號處理 ASIC 芯片的開發,是實現實時信號處理、提升系統響應速度的關鍵,其算法優化直接影響距離和速度測量的精度與穩定性。
3.4 硅光集成技術:規模化量產的核心保障
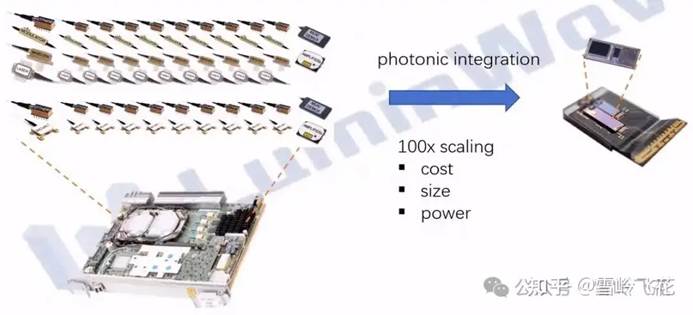
硅光集成技術是 FMCW 激光雷達實現小型化、低成本量產的核心支撐,其本質是采用 CMOS 兼容工藝,將光學器件與電子器件集成于硅基芯片中,形成功能完整的集成光子芯片。通過硅光集成,可將激光器、調制器、放大器、光學天線等核心部件集成于單一芯片,實現 "LiDAR-on-a-Chip" 的設計目標。
硅光集成技術的優勢在于:一是高集成度,大幅縮小激光雷達的體積和重量;二是低成本量產,依托成熟的 CMOS 工藝,可實現大規模生產,降低單位成本;三是高可靠性,減少了器件間的連接環節,提升了系統的穩定性和抗振動能力。目前,硅光集成芯片的關鍵技術難點在于 III-V 族材料與硅基芯片的異質集成,以及光器件與電器件的協同優化。
四、產業布局與技術趨勢:國內外企業的研發探索
當前,FMCW 激光雷達已成為車載傳感器領域的研發熱點,國內外企業紛紛布局相關技術與產品,形成了多元化的產業競爭格局。
4.1 國外技術領先企業的布局
國外企業在 FMCW 激光雷達領域起步較早,憑借在硅光技術、激光器研發等方面的積累,占據了技術領先地位。Aeva 作為行業標桿企業,率先實現了基于硅光芯片的 FMCW 激光雷達量產,其第四代硅光模組將發射端、光學系統、探測端等核心部件集成于硬幣大小的芯片上,產品探測距離可達 500m,角分辨率 0.025°×0.025°。Mobileye 依托英特爾的硅光技術優勢,開發了多通道 FMCW 激光雷達處理器 SoC,點云密度達 600pt/deg2,量產目標價格低于 1000 美元。此外,SiLC、Insight 等企業在長距離探測、高分辨率掃描等細分領域也取得了顯著進展,推動了 FMCW 技術的產業化落地。
4.2 國內企業的技術突破與創新
國內企業在 FMCW 激光雷達領域的研發雖起步較晚,但憑借在硅光集成、信號處理等領域的技術積累,已實現多項關鍵突破。洛微科技(LuminWave)依托硅光芯片技術,自主研發了F系列FMCW激光雷達,基于相干探測原理,具備完全陽光免疫能力,在正午強光直射下仍能保持穩定點云輸出;同時能夠穿透煙霧和塵土,即便在雨霧等惡劣天氣中,也能維持較高的測距與測速精度,滿足新國標對復雜環境的全天候感知要求。目前,洛微車載FMCW激光雷達已切入國內頭部商用重卡L2+輔助駕駛量產項目,逐步從“實驗室創新技術”邁向“前裝量產”。
4.3 未來技術發展趨勢
FMCW 激光雷達的未來發展將聚焦于三個核心方向:一是核心部件的性能升級,包括更窄線寬、更高線性度的調頻激光器,更高集成度的硅光芯片,以及更低噪聲的相干接收系統;二是成本控制與量產能力提升,通過硅光集成技術的規模化應用,推動產品成本降至車載場景可接受的水平;三是功能安全與車規適配,滿足 ISO 26262 功能安全標準和 ISO 21434 cybersecurity 標準,實現與自動駕駛系統的深度融合。
五、結語
FMCW 激光雷達通過相干檢測原理,在距離、速度、角度測量的精度與實時性上實現了對傳統 ToF 技術的超越,其抗干擾性、低功率特性和固態化潛力,完美契合了自動駕駛對傳感器的嚴苛要求。隨著調頻激光器、硅光集成、信號處理等核心技術的持續突破,FMCW 激光雷達的成本將逐步降低,量產規模不斷擴大,有望成為車載感知領域的主流方案。 在技術創新的浪潮中,國內外企業的持續研發與探索,將推動 FMCW 激光雷達的性能不斷升級,為自動駕駛的安全落地提供更可靠的感知支撐。未來,隨著硅光集成技術的進一步成熟和產業生態的完善,FMCW 激光雷達將不僅局限于車載場景,還將在工業自動化、機器人、消費電子等領域實現廣泛應用,開啟多維度感知的新時代。
參考文章:https://blog.csdn.net/tian362/article/details/138177527
-
FMCW
+關注
關注
9文章
109瀏覽量
24347 -
激光雷達
+關注
關注
979文章
4469瀏覽量
196498 -
車載激光雷達
+關注
關注
1文章
46瀏覽量
6601
發布評論請先 登錄
2022年的FMCW激光雷達,仍是未來可期?
又一廠商展出FMCW激光雷達,從PPT走向樣品
FMCW激光雷達,加速落地工業場景
激光雷達究竟為什么這么牛,這么貴
一文詳解激光雷達核心指標,實用性和可靠性第一
激光雷達的核心重要指標到底是什么?
從光電技術角度解析自動駕駛激光雷達
從四個維度深度剖析激光雷達核心技術




 工商網監
工商網監
評論