 簡單隨機搜索:無模型強化學習的高效途徑
簡單隨機搜索:無模型強化學習的高效途徑

現在人們對無模型強化學習的一個普遍看法是,這種基于隨機搜索策略的方法在參數空間中比那些探索行為空間的方法表現出更差的樣本復雜性。UC Berkeley的研究人員通過引入隨機搜索方法,推翻了這種說法。以下是論智對作者Benjamin Recht博文的編譯。
我們已經看到,隨機搜索在簡單的線性問題上表現得很好,而且似乎比一些強化學習方法(例如策略梯度)更好。然而隨著問題難度增加,隨機搜索是否會崩潰?答案是否定的。但是,請繼續讀下去!
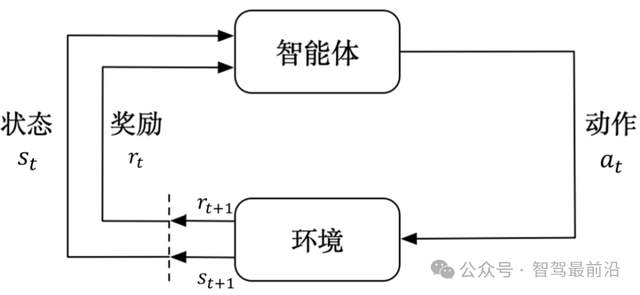
讓我們在強化學習社區感興趣的問題上應用隨機搜索。深度強化學習領域一直把大量時間和精力用于由OpenAI維護的、基于MuJoCo模擬器的一套基準測試中。這里,最優控制問題指的是讓一個有腿機器人在一個方向上盡可能快地行走,越遠越好。其中一些任務非常簡單,但是有些任務很難,比如這種有22個自由度的復雜人形模型。有腿機器人的運動由Hamilton方程控制,但是從這些模型中計劃動作是非常具有挑戰性的,因為沒有設計目標函數的最佳方法,并且模型是分段線性的。只要機器人的任何部位碰到堅硬物體,模型就會變化,因此會出現此前沒有的作用于機器人的法向力。于是,讓機器人無需處理復雜的非凸非線性模型而正常工作,對強化學習來說是個有趣的挑戰。
最近,Salimans及其在OpenAI的合作者表示,隨機搜索在這些標準測試中表現的很好,尤其是加上幾個算法增強后很適合神經網絡控制器。在另一項實驗中,Rajeswaran等人表示,自然策略梯度可以學習用于完成標準的先行策略。也就是說,他們證明靜態線性狀態的反饋——就像我們在LQR(Linear Quadratic Regulator)中使用的那樣——也足以控制這些復雜的機器人模擬器。但這仍然有一個問題:簡單隨機搜索能找到適合MuJoCo任務的線性控制器嗎?
我的學生Aurelia Guy和Horia Mania對此進行了測試,他們編寫了一個非常簡單的隨機搜索版本(是我之前發布的Iqrpols.py中的一個)。令人驚訝的是,這個簡單的算法學習了Swimmer-v1,Hopper-v1,Walker2d-v1和Ant-v1任務中的線性策略,這些策略實現了之前文章中提出的獎勵閾值。不錯!
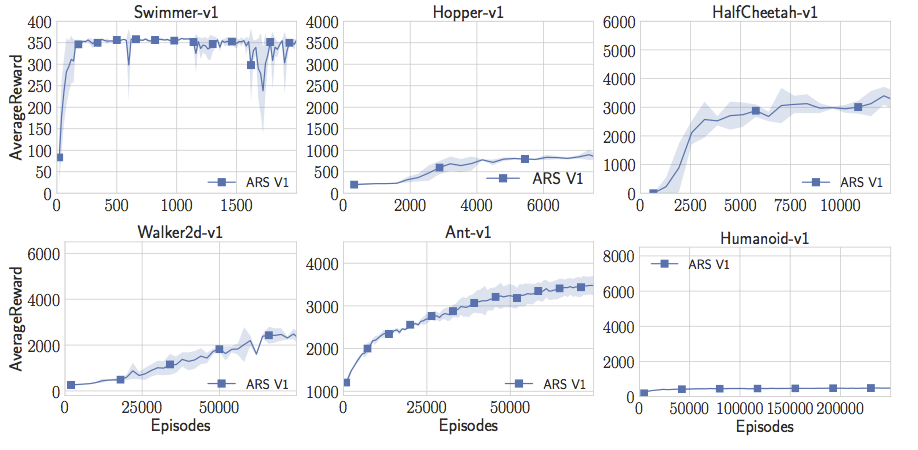
但是只有隨機搜索還不夠完美。Aurelia和Horia完全不能用人形模型做出有趣的事。試了很多次參數調整后,他們決定改進隨機搜索,讓它訓練地更快。Horia注意到許多強化學習的論文利用狀態的統計數據,并且在將狀態傳遞給神經網絡之前能夠將狀態白化。所以他開始保持在線估計狀態,在將他們傳遞給線性控制器之前將它們白化。有了這個簡單的竅門,Aurelia和Horia現在可以讓人形機器人做出最佳表現。這實際上是Salimans等人在標準值上達到的“成功閾值”的兩倍。只需要線性控制器、隨機搜索和一個簡單的技巧。
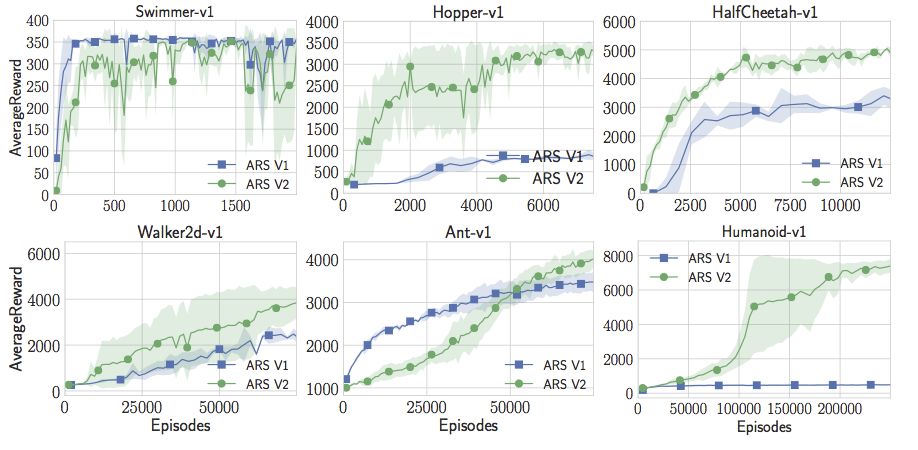
另外還有一件簡單的事情就是,代碼比OpenAI的進化策略論文中的要快15倍。我們可以用更少的計算獲得更高的獎勵。用戶可以在一小時內在標準18核EC2實例上訓練一個高性能人形模型。
現在,隨著在線狀態的更新,隨機搜索不僅超過了人形模型的最佳水平,而且還超越了Swimmer-v1、Hopper-v1、HalfCheetah-v1。但在Walker2d-v1和Ant-v1上的表現還不是很好。但是我們可以再添加一個小技巧。我們可以放棄不會產生良好回報的采樣方向。這增加了一個超參數,但有了這一額外的調整,隨機搜索實際上可能會達到或超過OpenAI的gym中所有MuJoCo標準的最佳性能。注意,這里并不限制與策略梯度的比較。就我所知,這些策略比任何無模型強化學習的應用結果要好,無論是Actor Critic Method還是Value Function Estimation Method等等更深奧的東西。對于這類MuJoCo問題,似乎純粹的隨機搜索優于深度強化學習和神經網絡。
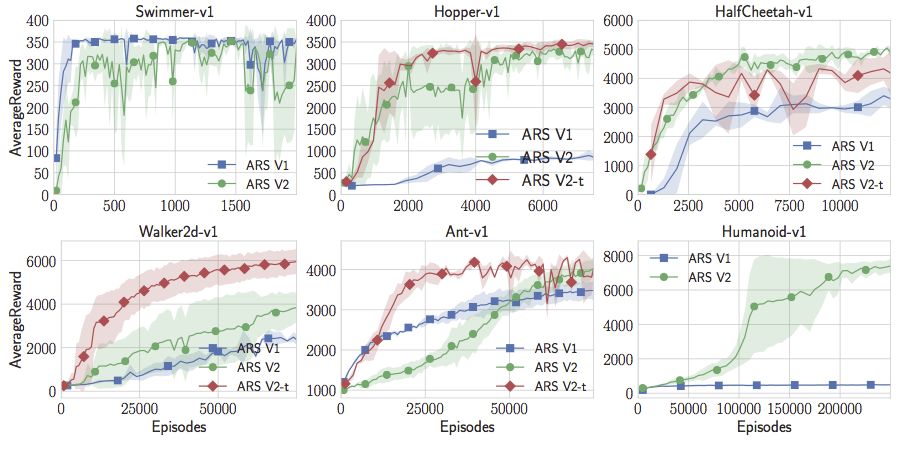
通過一些小調整得到的隨機搜索結果勝過了MuJoCo任務中的所有其他方法,并且速度更快。論文和代碼都已公布。
從隨機搜索中,我們有了以下幾點收獲:
基準很難
我認為所有這一切唯一合理的結論就是這些MuJoCo Demo很容易,毫無疑問。但是,用這些標準測試NIPS、ICML或ICLR中的論文可能不再合適。這就出現了一個重要的問題:什么是強化學習的良好標準?顯然,我們需要的不僅僅是Mountain Car。我認為具有未知動作的LQR是一個合理的任務,因為確定新實例并了解性能的限制是很容易的。但是該領域應該花更多時間了解如何建立有難度的標準。
不要在模擬器上抱太大希望
這些標準比較容易的一部分原因是MuJoCo不是一個完美的模擬器。MuJoCo非常快,并且對于概念驗證非常有用。但為了快速起見,它必須在接觸點周圍進行平滑處理(接觸的不連續是使腿部運動困難的原因)。因此,你只能讓其中一個模擬器走路,并不意味著你可以讓真正的機器人走路。的確,這里有四種讓獎勵可以達到6000的步態,但看起來都不太現實:
即使是表現最好的模型(獎勵達到11600),如下圖所示,這種看起來很蠢的步態也不可能應用在現實中:
努力將算法簡化
在簡單算法中添加超參數和算法小部件,可以在足夠小的一組基準測試中提高其性能。我不確定是否放棄最好的方向或狀態歸一化會對新的隨機搜索問題起作用,但這對MuJoCo的標準和有用。通過添加更多可調參數,甚至可以獲得更多回報。
使用之前先探索
注意,由于隨機搜索方法很快,我們可以評估它在許多隨機種子上的表現。這些無模型的方法在這些基準上都表現出驚人的巨大差異。例如,在人形任務中,即使我們提供了我們認為是好的參數,模型的訓練時間也慢了四分之一。對于那些隨機種子,它會找到相當奇特的步態。如果將注意力限定在三個隨機種子上用于隨機搜索,通常具有誤導性,因為你可能會將性能調整為隨機數生成器的特性。
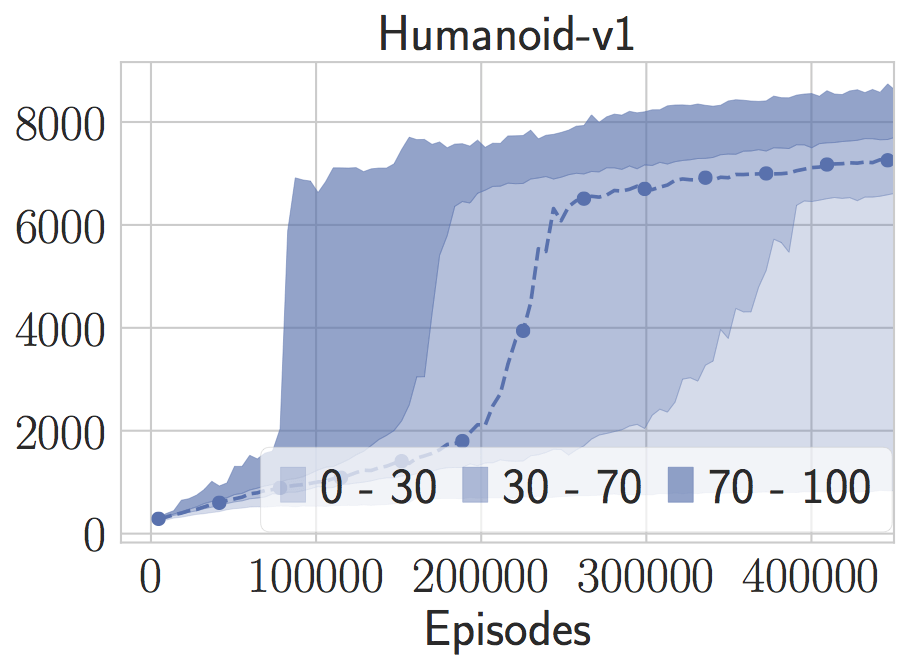
這種現象在LQR上也出現了。我們可以將算法向一些隨機種子進行微調,然后在新的隨機種子上看到完全不同的行為。Henderson等人用深度強化學習方法觀察了這些現象,但我認為如此高的變量將成為所有無模型方法的通用癥狀。僅通過模擬就能解釋很多邊界情況。正如我在上一篇文章中所說的:“通過拋棄模型和知識,我們永遠不知道是否可以從少數實例和隨機種子中學到足夠的東西進行概括。”
-
強化學習
+關注
關注
4文章
270瀏覽量
11970
原文標題:簡單隨機搜索:強化學習的高效途徑
文章出處:【微信號:jqr_AI,微信公眾號:論智】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
算法工程師需要具備哪些技能?
自動駕駛中常提的離線強化學習是什么?
強化學習會讓自動駕駛模型學習更快嗎?

多智能體強化學習(MARL)核心概念與算法概覽

上汽別克至境E7首發搭載Momenta R6強化學習大模型
NVIDIA 推出 Nemotron 3 系列開放模型

如何訓練好自動駕駛端到端模型?

今日看點:智元推出真機強化學習;美國軟件公司SAS退出中國市場
自動駕駛中常提的“強化學習”是個啥?

速看!EASY-EAI教你離線部署Deepseek R1大模型

如何在Ray分布式計算框架下集成NVIDIA Nsight Systems進行GPU性能分析
NVIDIA Isaac Lab可用環境與強化學習腳本使用指南

最新人工智能硬件培訓AI 基礎入門學習課程參考2025版(大模型篇)
【書籍評測活動NO.62】一本書讀懂 DeepSeek 全家桶核心技術:DeepSeek 核心技術揭秘
18個常用的強化學習算法整理:從基礎方法到高級模型的理論技術與代碼實現




 工商網監
工商網監
評論