 涂鴉運動子系統實現突破性創新!毫秒級貼邊+高智商清掃重新定義移動機器人
涂鴉運動子系統實現突破性創新!毫秒級貼邊+高智商清掃重新定義移動機器人

一、移動機器人的核心技術有多難?
在智能化浪潮推動下,可移動智能硬件系統的應用正從服務于家庭的清潔機器人,逐步擴展至工/商業服務領域。而要想實現這類系統在精細場景下的靈活應用,核心技術就在于能夠實現自主移動與動態決策能力,對技術革新的要求不僅是多維度的融合,而且更復雜,比如:
需要通過激光雷達、視覺傳感器與慣性導航模塊,實現環境感知與SLAM實時定位;
基于深度學習與強化學習的路徑規劃算法,支持動態避障與最優路線決策;
高精度電機控制與低功耗能源管理,能夠有效保障穩定續航與靈活運動;
5G、邊緣計算等技術實現云端協同,賦予設備遠程管理與自主進化能力。
可以說,可移動智能硬件系統正以【感知-決策-執行】的閉環能力重塑生產力邊界。但由于技術難度的復雜性,傳統硬件企業常面臨雙重困境:一方面需承擔千萬級研發投入與過長的開發周期,另一方面受限于因算法工程化能力薄弱導致的商業化進程遲滯。
二、涂鴉運動子系統的變革性創新
為突破行業共性技術瓶頸,涂鴉智能基于 TuyaOS 架構打造了運動控制子系統,幫助開發者降低移動智能硬件的開發門檻。它繼承了 TuyaOS 的一系列優點,如強大的跨平臺兼容、低代碼開發硬件傳感以及電機驅動等,不僅提高了開發效率,而且成功構建覆蓋感知-決策-執行的全棧式機器人技術矩陣。開發者可直接進行一站式應用,目前已成功幫助各品牌客戶實現多品類移動智能機器人的規模化落地。
該方案的最大優勢就在于,涂鴉在最小芯片資源中,利用運動子系統的跨平臺性能,實現了核心技術的突破,包括低成本的移動定位算法、規劃算法、控制算法:
涂鴉在 SLAM 實時定位軟件工程中做了創新改進,通過強化多線程并行計算能力,大大提升建圖定位的核心算法性能,完美解決了低特征場景(如純色墻面、重復結構空間等)的建圖定位與重定位問題;
利用強化學習策略,涂鴉成功突破傳統規則系統的局限,解決了難以泛化的各類復雜場景脫困問題;
改進并解決了最優覆蓋路徑規劃問題。
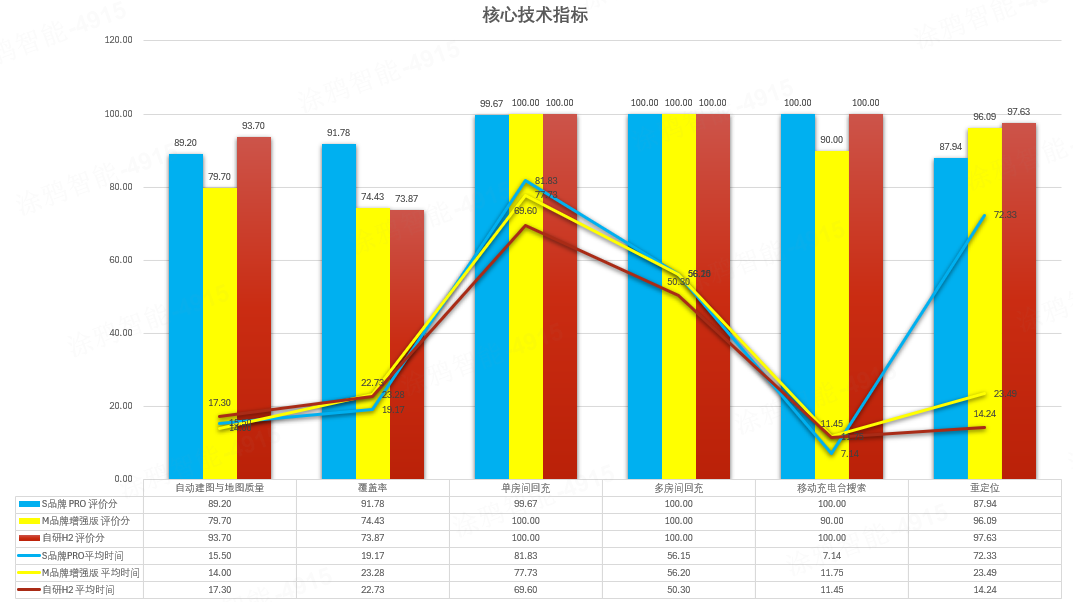
最終經過實際應用后的可靠反復測驗,搭載涂鴉運動子系統的移動機器人產品,在定位精度、任務完成率、能效比等關鍵算法性能指標上,較主流友商方案實現 10%~20% 的顯著提升!
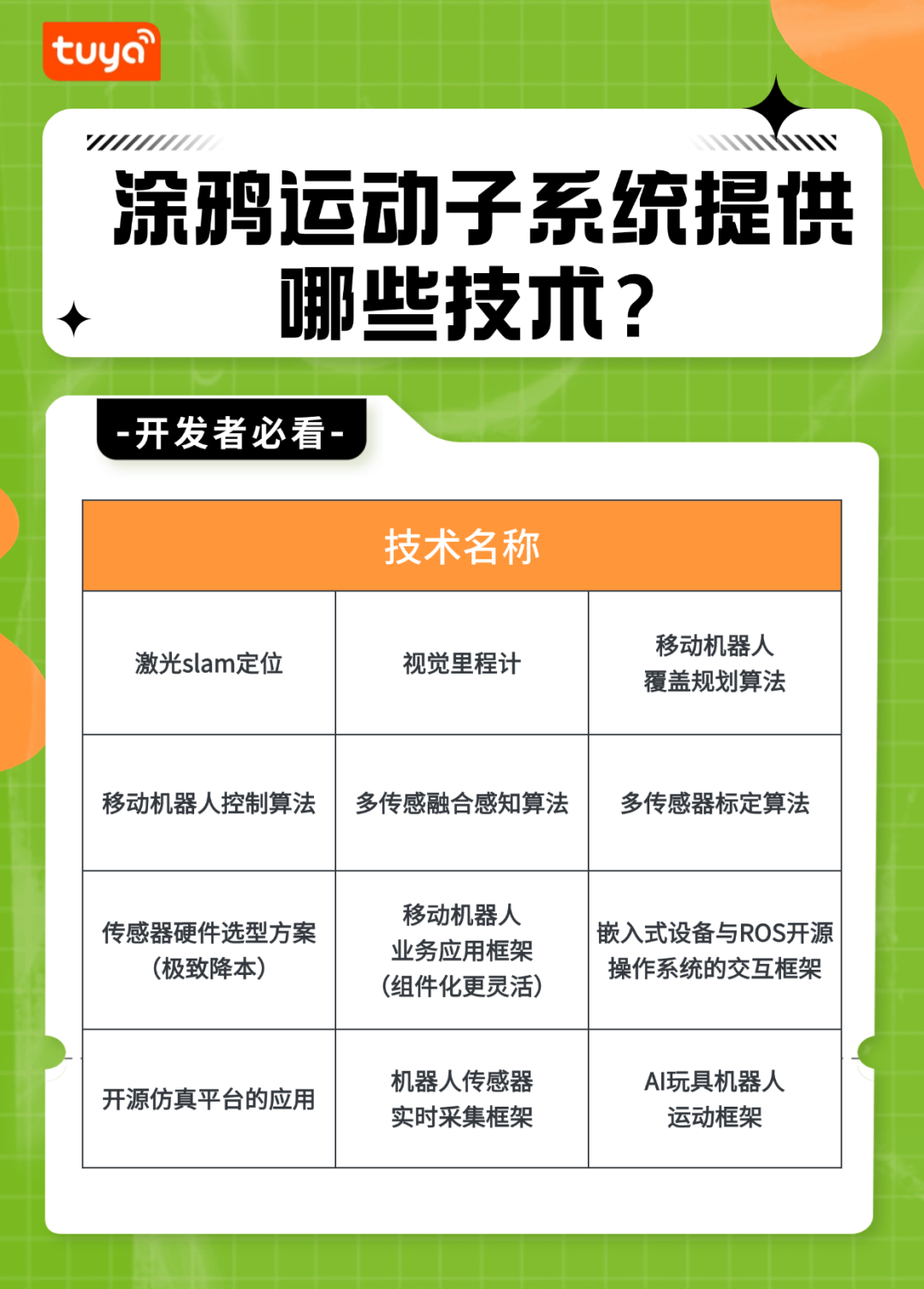
1.現階段,我們將逐步為開發者提供多種技術支持:
2. 該系統在移動機器人中的能力水平
以掃地機器人的應用為例。目前相較于市面上同等規格的家用清潔機器人產品,涂鴉在部分關鍵指標上都有領先優勢:
2.1 高效的智能規劃清掃能力
相較于業界同等水平的清潔機器人,涂鴉提供的家居清掃規劃算法,在技術實現與性能優化層面展現了多重差異化優勢,包括清掃效率和清潔覆蓋率都呈現大幅度領先,而這也是長期打磨和優化后的最優策略。
2.2 魯棒的定位能力
市面上有不少以激光雷達為定位方案的移動機器人,這種技術方案的弊端就在于移動機器人很容易在非平整地板( 如門檻、吧臺椅等場景)出現疊圖的現象,導致用戶經常抱怨需要重新建圖、體驗感差。
而涂鴉運動子系統提供的定位方案,經過大量的算法工程優化和傳感器處理優化,能在任意工況下,實現完全不疊圖,保證穩定的定位輸出。

2.3 高效的重定位能力
涂鴉運動子系統精心集成多種環境適配算法,為用戶提供了快速重定位的能力。通過該系統,移動機器人可根據實時采集的幾何結構、光照強度等參數,動態切換最優定位方案?。
比如:用戶可以在多個房間、辦公樓、醫院、商場等任意環境中啟動機器人,無需指定機器人初始位置或初始樓層,就能自適應無縫銜接、匹配多樓層地圖。即使在低特征的長廊退化環境下(指線性狹長地理空間),定位效率與準確率也能達到 100%。
(涂鴉重定位能力展示)
2.4 快速自主建圖
該系統還提供了高效的自主建圖能力,擺脫傳統的手動建圖或者全屋覆蓋建圖,可幫助提高移動機器人的環境構建與部署效率。
2.5 突破性實現毫米級貼邊能力
相對于市面上的機器人,要達到 1 厘米以內的貼邊清掃能力,往往需要搭配昂貴的線激光模組。而涂鴉提供的移動能力,可以脫離線激光模組,單純使用 5HZ 的導航激光,就能利用算法補足激光測量頻率與精度問題,實現毫米級貼邊清掃能力。

3. 提供二次開發能力
除了基礎的規劃、定位、控制能力,該系統還提供一系列的二次開發能力,為開發者提供靈活的產品功能模塊化開發流程。
?
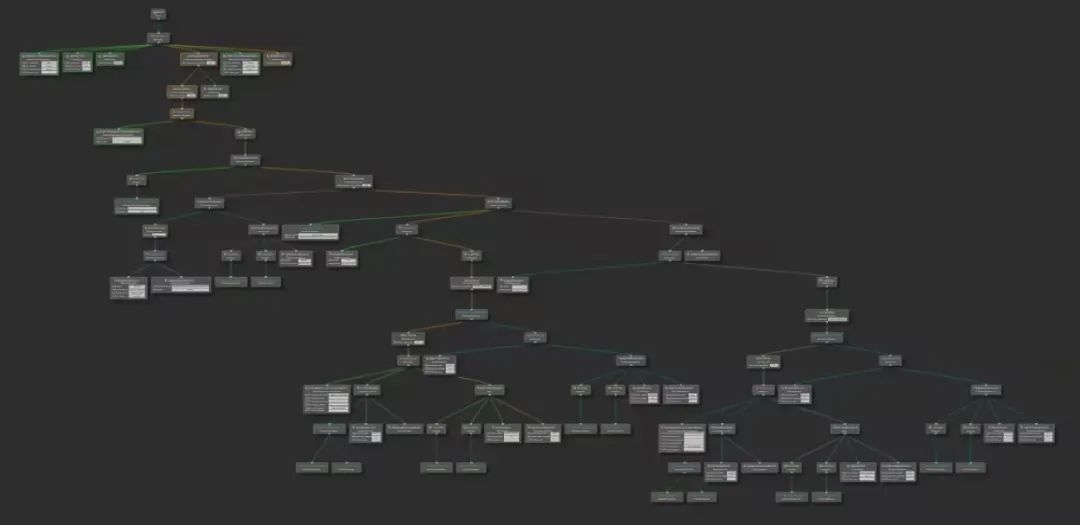
3.1 自定義機器人行為
針對多形態機器人開發者及高階算法定制需求,涂鴉運動子系統突破傳統掃地機開發框架桎梏,為開發者額外提供一系列默認的行為框架:在行為框架中,開發者可任意添加并定制屬于自己的控制動作。
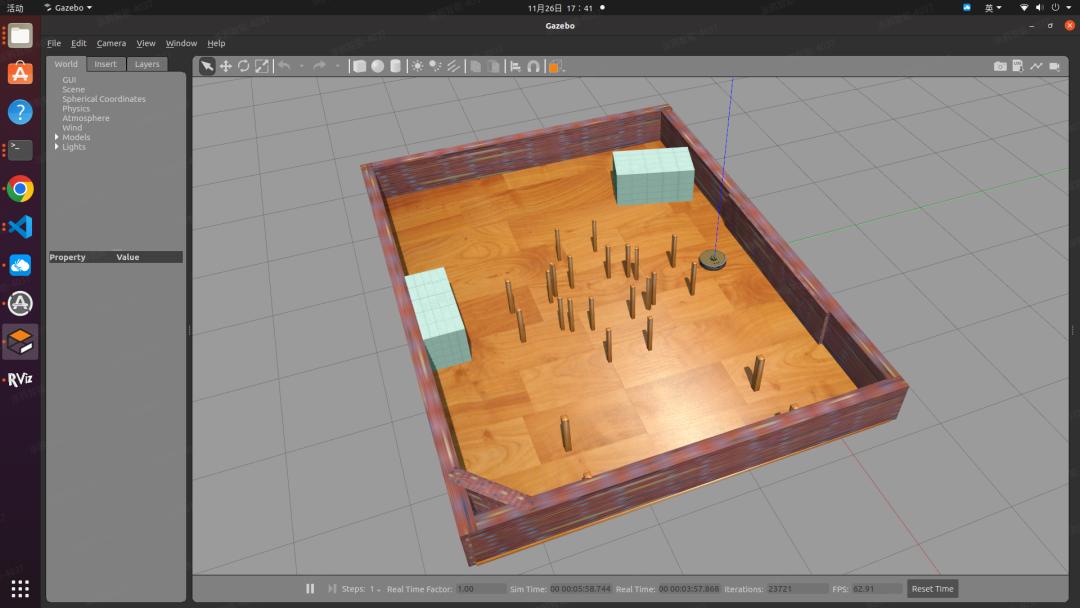
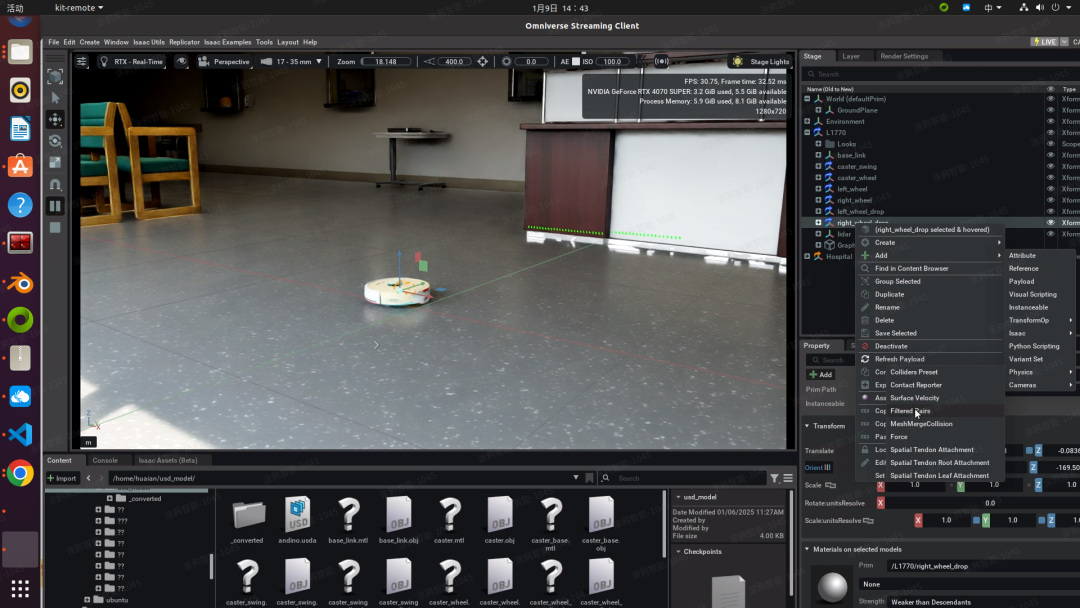
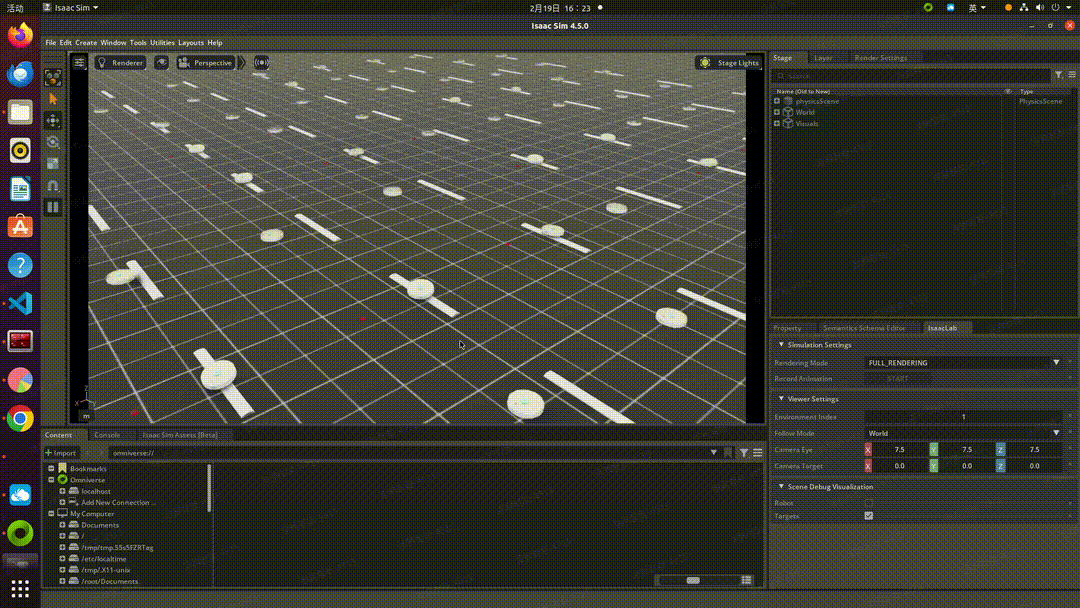
3.2 機器人仿真框架
針對還不想投入硬件開發、只想先驗證算法原型的開發者,涂鴉提供基于主流 gazebo、isaac sim 等仿真環境的調試和橋接入口,開發者們可基于此先行調試,最后再部署算法到生產環境中,大大降低試錯成本和時間。
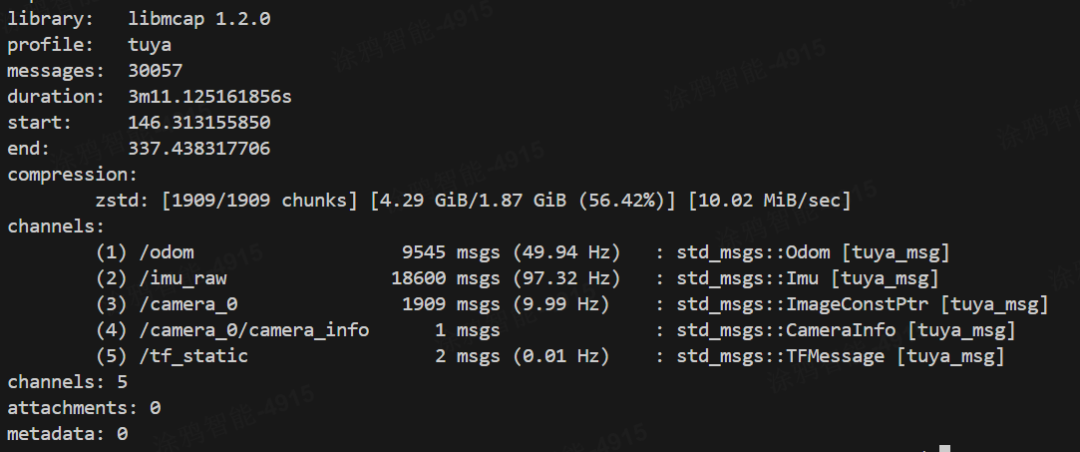
3.3 傳感器信息錄取與回放應用
為了方便開發者對還處于運行中的移動機器人進行故障分析,涂鴉貼心提供相關信息的實時記錄和回放功能,助力開發者完成離線調試。
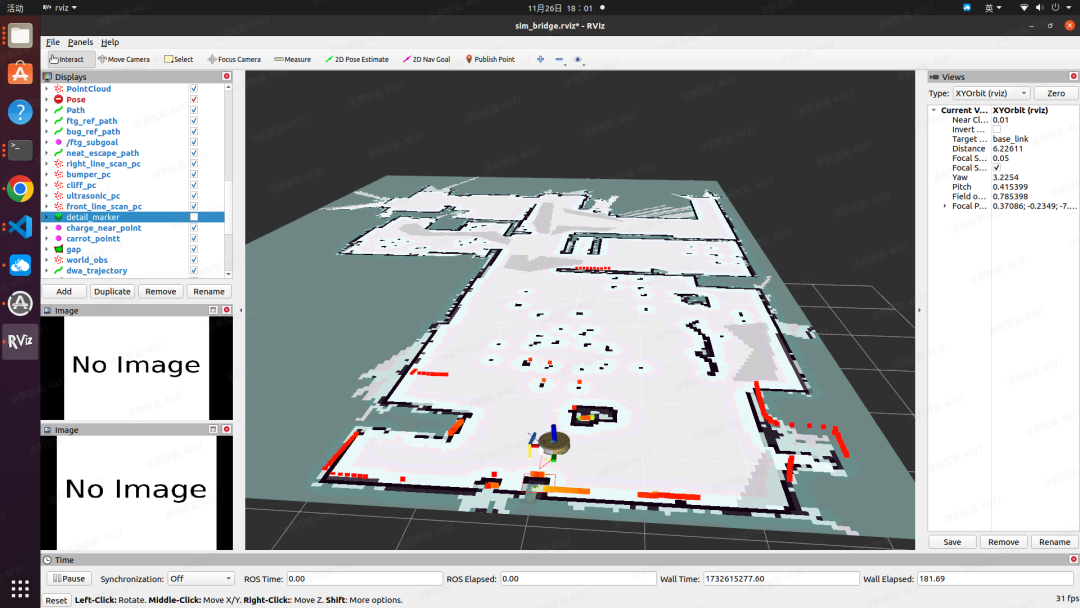
3.4 與 ROS 開源社區的橋接與實時可視化調試
通過涂鴉運動子系統開發平臺,開發者也可以使用 ROS1/ROS2 平臺的橋接功能,在設備運行時,就能在 ROS 開源軟件中進行可視化調試。
3.5 AI 強化學習部署流程
基于涂鴉 issac lab 的強化學習功能,用戶可以自定義學習任務,并結合涂鴉提供的運動子系統行為樹框架,快速部署預訓練模型。
3.6 更多的算法與功能開源
我們不局限于上述描述的二次開發功能,還可以針對不同的開發者釋放更多源碼。
-
機器人
+關注
關注
213文章
31071瀏覽量
222162 -
移動機器人
+關注
關注
2文章
817瀏覽量
34867 -
涂鴉智能
+關注
關注
7文章
309瀏覽量
20686
發布評論請先 登錄
探索 NXP MR - CANHUBK344 評估板:為移動機器人應用賦能
MR-BMS771參考設計:適用于移動機器人的電池管理系統
Infineon移動機器人電機控制方案深度解析
Infineon DEMO_IMR_BMSPWR_V1:移動機器人電池管理系統的卓越之選
Infineon DEMO_IMR_BMSCTRL_V1:助力移動機器人電池管理的創新方案
移動機器人“芯”引擎爆發,禾賽、海思新品逆襲

移動機器人技術的發展歷程
恩智浦自主移動機器人設計要點




 工商網監
工商網監
評論