") Infineon移動機器人電機控制方案深度解析
Infineon移動機器人電機控制方案深度解析

Infineon移動機器人電機控制方案深度解析
在當今科技飛速發(fā)展的時代,移動機器人在物流、生產、服務等眾多領域的應用日益廣泛。電機控制作為移動機器人的核心技術之一,其性能直接影響著機器人的運行效率和穩(wěn)定性。今天,我們就來深入探討Infineon的移動機器人電機控制解決方案,具體涉及DEMO_IMR_MTRCTRL_V1和DEMO_ANGLE_SENS_V1這兩款開發(fā)板。
文件下載:Infineon Technologies 移動機器人電機控制演示板.pdf
1. 方案概述
本方案主要面向設計工程師、技術人員和開發(fā)者,旨在為他們提供高度集成且高效的機器人和電池供電電機驅動解決方案。方案的核心目標是為自主服務機器人功能提供演示平臺,借助Infineon的組件實現(xiàn)更精確的電機控制,尤其適用于低速運行的場景。
2. 重要注意事項與安全預防措施
2.1 重要注意事項
評估板和參考板僅用于演示和評估,它們并非商業(yè)化產品,因此不適合用于可靠性測試或生產。這些板子在設計時雖然考慮了環(huán)境條件,但未經過完整的安全、制造和全溫度范圍或壽命測試。用戶有責任確保其使用方式符合相關標準和要求,并且要自行評估板子對預期應用的適用性以及文檔信息的完整性和正確性。此外,英飛凌對這些板子及其文檔信息不提供任何明示或暗示的保證,用戶需自行承擔使用風險。
2.2 安全預防措施
在使用這些開發(fā)板時,務必注意安全。由于板子的直流母線電位高達1000 VDC,在使用示波器測量電壓波形時,必須使用高壓差分探頭,以防發(fā)生人身傷害。同時,板子中的直流母線電容在移除主電源后需要一定時間放電,在對驅動系統(tǒng)進行操作前,需等待5分鐘,確保電容放電至安全電壓水平。此外,板子在測試過程中,散熱片和設備表面可能會變熱,操作時需采取必要的防護措施。只有熟悉驅動、電力電子和相關機械的人員才能對系統(tǒng)進行規(guī)劃、安裝、調試和維護。并且,要注意靜電防護,避免對板子中的敏感部件造成損壞。
3. 移動機器人與方案的結合
3.1 移動機器人類型
移動機器人主要分為自動導引車(AGV)和自主移動機器人(AMR)兩類。AGV通過激光、條形碼、無線電波、視覺傳感器或磁帶等實現(xiàn)預定路徑導航,而AMR則利用自主映射、定位、導航和避障功能,無需外部路徑。這兩類機器人的運行速度通常較低,因此在電機控制和驅動方面有相似的要求。
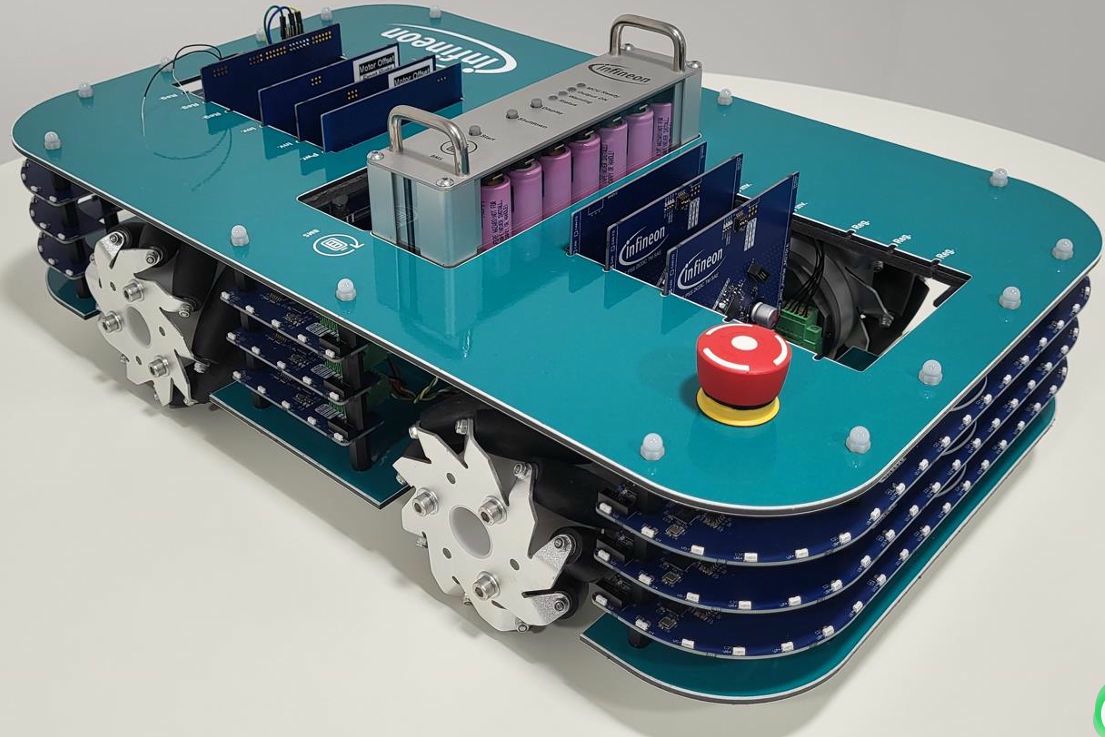
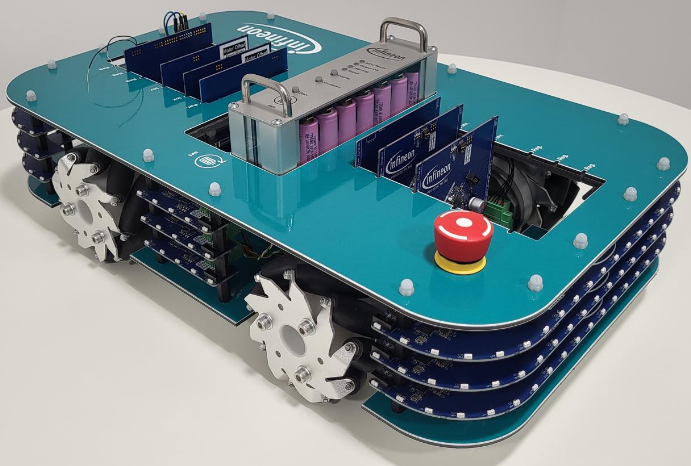
3.2 Infineon Mobile Robot (IMR)平臺
IMR是一個綜合性的機器人平臺,可以與各種不同的板子(如傳感器、電機控制、無線通信、電池管理等)配合使用。本方案中的DEMO_IMR_MTRCTRL_V1板用于直接驅動IMR中的無刷直流(BLDC)電機,DEMO_ANGLE_SENS_V1板則為電機中的轉子提供角位置信息,從而實現(xiàn)更精確的電機控制,特別是在極低速度下。
4. DEMO_IMR_MTRCTRL_V1板詳解
4.1 基本功能
該板可驅動一個BLDC或步進電機,支持多種角度傳感器選項,包括編碼器和基于霍爾效應的傳感器。它采用12節(jié)鋰離子電池供電,但減少電池數(shù)量也可運行,不過功率會相應降低。
4.2 接口與通信
板子通過CAN接口進行通信,接收速度信息,并將其作為速度環(huán)控制的參考輸入。通過雙列直插式封裝(DIP)開關可以更改CAN地址,因此多個板子可以使用相同的固件在同一總線上運行。
4.3 電機選擇
文檔中以GL60外轉子云臺電機為例,該電機具有14對磁極,無需齒輪箱即可實現(xiàn)低速旋轉。此外,還需要一個外部J-Link調試器將固件燒錄到微控制器中。
4.4 規(guī)格參數(shù)
- 輸入輸出:直流輸入電壓范圍為18 - 60 V,標稱值為48 V;最大輸入電流為10 A;三相FOC輸出,每相最大輸出電流為5 A(RMS),最大輸出連續(xù)功率為150 W。
- 控制方案:支持有傳感器/無傳感器的FOC速度控制,開關頻率為20 kHz,采用三個電流分流器。
- 保護特性:具備過流保護(OCP)、欠壓鎖定(UVLO)保護、DVDD線性穩(wěn)壓器過壓鎖定(OVLO)保護以及過溫關機(OTS)和警告(OTW)功能。
- 最大組件溫度:在環(huán)境溫度為30°C時,電阻、陶瓷電容、薄膜電容、電解電容、MOSFET晶體管、二極管和IC的最大允許溫度均小于100°C。
- 尺寸:評估板的寬度為100 mm,長度為88.09 mm,高度為12.25 mm。
4.5 原理圖設計
- 主要芯片:板子的主芯片是IMD701A-Q064X128-AA,這是一款高度集成的芯片,包含一個完全可編程的驅動優(yōu)化的Arm? Cortex?-M0微控制器(XMC1404,主頻48 MHz)、一個三相智能柵極驅動器、三個集成增益和偏移生成的電流感測放大器以及一個集成的同步降壓轉換器控制器和LDO,可實現(xiàn)緊湊的設計,減少物料清單和復雜度。
- CAN接口:通過TLE9351VSJ高速CAN收發(fā)器進行通信,可直接與IMD701A電機控制器配合使用,無需電平轉換器。可以通過DIP開關(S1)更改CAN地址。
- 三相逆變器:由六個OptiMOS? 6 ISZ053N08NM6 80 V/5.3 mΩ開關組成,每個相輸出連接到卡邊緣連接器,用于向電機供電。同時,每個半橋都配備了緩沖電容,所有柵極通過0 Ω電阻連接到IMD701A,用于調試和測量。
- 接口設計:板子通過10針調試接口進行編程,通過卡邊緣連接器提供電池電壓、相輸出電壓、角度傳感器引腳和CAN接口。卡邊緣連接器的設計基于Sullins Connector Solutions的EBC18DCWN-S371插座連接器。
5. 電機選擇與應用
由于電機控制板用于AGV/AMR應用,對傳動系統(tǒng)的要求通常是低外形尺寸、低重量和低轉速。因此,選擇了具有高極對數(shù)的GL60電機,該電機通常用于云臺系統(tǒng),可在極低速度下實現(xiàn)無齒槽運動。電機具有14對磁極,額定電壓為24 V,但制造商建議可以在48 V下運行。電機的直徑為69 mm,厚度為22.3 mm,相電感為2.72 mH,相電阻為5.5 Ω。電機通過螺絲安裝,電纜可以穿過電機。在電機的聯(lián)軸器內安裝了一個磁鐵,用于讓頂部的旋轉傳感器PCB感應電機的機械旋轉角度。由于磁鐵的磁化方向可能會因安裝位置而不同,因此需要在固件中校準電機的偏移位置。
6. DEMO_IMR_ANGLE_SENSE_V1板詳解
6.1 角度傳感器
由于應用需要低速和從零速開始的扭矩,無傳感器方法的性能較差,因此設計了帶有TLI5012B E1000的角度傳感器PCB。TLI5012B E1000是一款360°角度傳感器,通過測量正弦和余弦角度分量來檢測磁場方向,內部進行數(shù)字處理以計算磁場(磁鐵)的角度方向。該傳感器是預校準的,校準參數(shù)存儲在激光熔絲中,啟動時熔絲的值會寫入觸發(fā)器,可通過特定應用參數(shù)進行更改。此外,內部自動校準算法可提高在寬溫度范圍和長壽命下的角度測量精度。
6.2 接口模式
傳感器支持多種接口模式,包括雙向同步串行通信(SSC)、脈寬調制(PWM)協(xié)議、短PWM代碼(SPC)協(xié)議、霍爾開關模式(HSM)和增量接口(IIF)。本方案中使用的是IIF類型(E1000),它模擬了占空比為50%的光學正交編碼器的操作,可通過寄存器配置每旋轉的步數(shù),旋轉方向可通過IFA和IFB通道之間的相移(A/B模式)或IFB通道的電平(Step/Direction模式)來確定。
6.3 原理圖與PCB設計
PCB上有IIF和SPI兩種接口選項,本應用中僅使用IIF接口。使用IIF接口時,初始角度檢測較為困難,因為啟動后IIF會傳輸與實際絕對角度值相對應的脈沖數(shù),微控制器通過這些脈沖獲取絕對位置信息。IFC引腳提供指示零交叉的索引信號,需要在微控制器的POSIF接口激活后啟動傳感器。PCB上有兩個長孔,可實現(xiàn)靈活定位,適用于其他應用。
總結
Infineon的移動機器人電機控制解決方案通過DEMO_IMR_MTRCTRL_V1和DEMO_ANGLE_SENS_V1開發(fā)板,為移動機器人的電機控制提供了高度集成、高效且精確的解決方案。其在硬件設計、電機選擇、角度傳感器應用等方面都有獨特的優(yōu)勢,能夠滿足AGV/AMR等移動機器人在低速運行時的電機控制需求。不過,在使用過程中,工程師們一定要嚴格遵守重要注意事項和安全預防措施,確保系統(tǒng)的穩(wěn)定運行和人員安全。大家在實際應用中是否遇到過類似方案的挑戰(zhàn)呢?歡迎在評論區(qū)分享交流。
-
移動機器人
+關注
關注
2文章
819瀏覽量
34908 -
Infineon
+關注
關注
2文章
112瀏覽量
31406
發(fā)布評論請先 登錄
探索 NXP MR - CANHUBK344 評估板:為移動機器人應用賦能
MR-VMU-RT1176快速上手:開啟移動機器人車輛管理單元設計之旅
MR-BMS771參考設計:適用于移動機器人的電池管理系統(tǒng)
Infineon DEMO_IMR_BMSPWR_V1:移動機器人電池管理系統(tǒng)的卓越之選
Infineon DEMO_IMR_BMSCTRL_V1:助力移動機器人電池管理的創(chuàng)新方案
移動機器人“芯”引擎爆發(fā),禾賽、海思新品逆襲

安森美產品如何助力打造下一代自主移動機器人
移動機器人技術的發(fā)展歷程
恩智浦自主移動機器人設計要點

瑞芯微 RK3568/3588:為移動機器人注入智慧動力引擎

輪式移動機器人電機驅動系統(tǒng)的研究與開發(fā)
移動機器人電機控制DEMO (原理圖+BOM+PCB)
安森美在自主移動機器人領域的發(fā)展成果
移動機器人電機控制DEMO(原理圖+BOM+PCB)



 工商網監(jiān)
工商網監(jiān)
評論