 Infineon DEMO_IMR_BMSCTRL_V1:助力移動機器人電池管理的創新方案
Infineon DEMO_IMR_BMSCTRL_V1:助力移動機器人電池管理的創新方案

Infineon DEMO_IMR_BMSCTRL_V1:助力移動機器人電池管理的創新方案
在當今科技飛速發展的時代,移動機器人在各個領域的應用越來越廣泛,從物流倉儲到醫療服務,它們的身影無處不在。而電池管理系統(BMS)作為移動機器人的關鍵組成部分,對于保障機器人的穩定運行和電池的安全高效使用起著至關重要的作用。今天,我們就來深入了解一下英飛凌(Infineon)推出的DEMO_IMR_BMSCTRL_V1演示板,看看它是如何為移動機器人的電池管理提供強大支持的。
文件下載:Infineon Technologies DEMOIMRBMSCTRLV1 BMS控制演示板.pdf
一、文檔概述
這份文檔是關于DEMO_IMR_BMSCTRL_V1演示板的用戶指南,為設計工程師、技術員和電子系統開發者提供了詳細的功能描述和使用指導。文檔涵蓋了硬件、固件、快速啟動指南、物料清單、PCB布局等多個方面,旨在幫助用戶快速上手并充分發揮該演示板的性能。
二、移動機器人與IMR平臺
(一)移動機器人類型
移動機器人主要分為自動化導引車(AGV)和自主移動機器人(AMR)兩種類型。AGV通常沿著預先設定的路徑行駛,依靠激光、條形碼、無線電波、視覺傳感器或磁帶等進行導航;而AMR則具有更強的自主性,能夠通過傳感器進行自主建圖、定位、導航和避障,無需外部路徑引導。
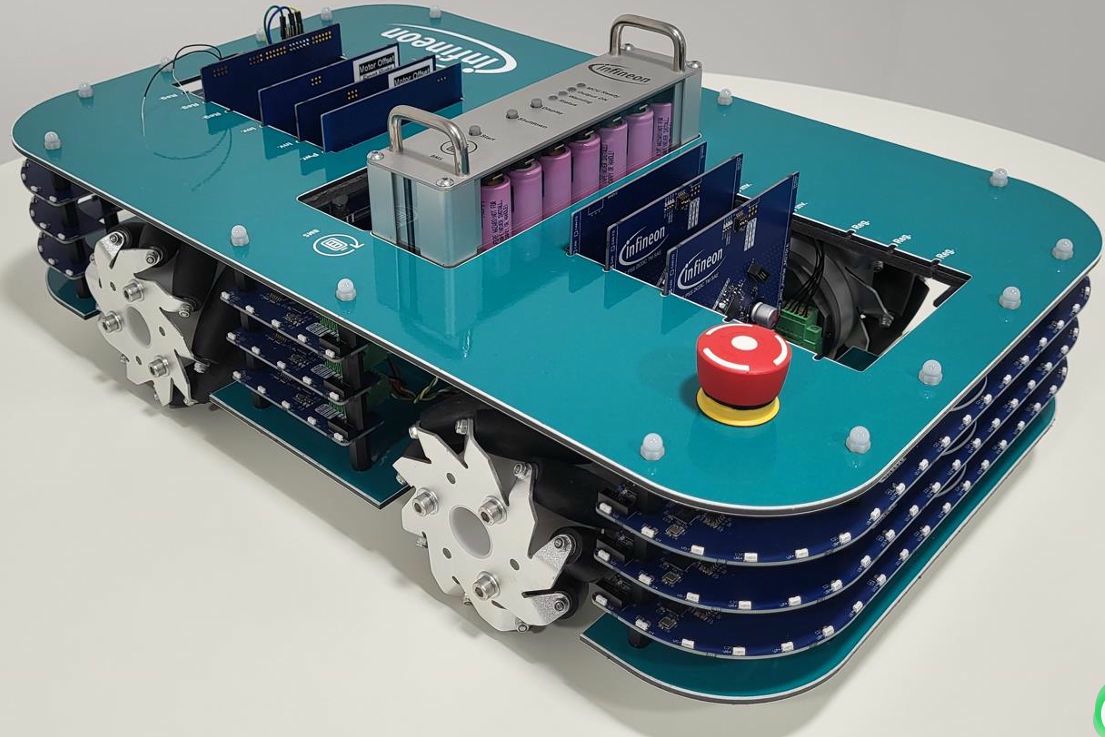
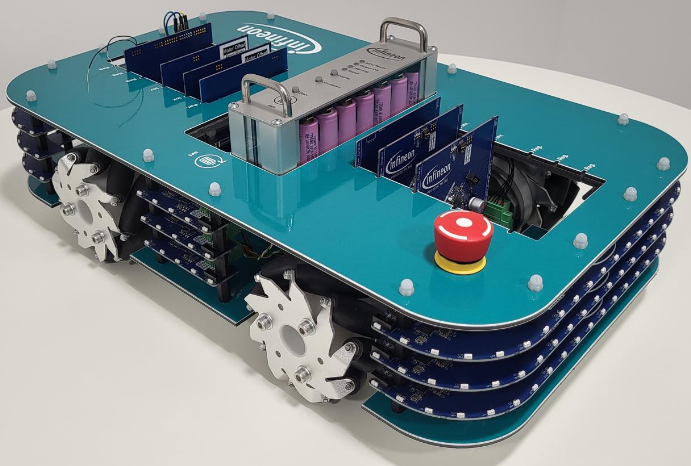
(二)Infineon Mobile Robot(IMR)
英飛凌的IMR是一個綜合性的機器人平臺,可與各種傳感器、電機控制、無線通信和電池管理等電路板配合使用。DEMO_IMR_BMSCTRL_V1演示板主要用于IMR的電池管理系統,承擔電池監測、平衡、充電狀態(SoC)和健康狀態(SoH)估計等任務。
三、DEMO_IMR_BMSCTRL_V1演示板詳解
(一)硬件設計
- 壓電蜂鳴器電路:該電路用于提供音頻反饋,在充電結束、低電壓警告、過流警告和過溫警告等事件發生時發出聲音提示。用戶可以通過PSoC? 6 MCU的數字輸出來控制蜂鳴器。
- 串行F - RAM存儲電路:采用CY15B256Q 256 Kb非易失性存儲器,基于先進的鐵電工藝,讀寫操作類似于RAM,具有可靠的數據保留能力,可存儲121年。它通過SPI接口與PSoC? 6 MCU相連,用于存儲測量的單個電池電壓和總電流值,以便進一步計算SoC和估計SoH。此外,還提供了寫保護(WP)和保持(HOLD)引腳,增強了數據的安全性和靈活性。
- 電子紙顯示電路:演示板配備了電子紙顯示屏,可顯示所有必要的信息和BMS狀態,即使系統斷電也能保留最后一次顯示的內容。顯示屏通過IRLML6401 P溝道MOSFET直接由微控制器供電,必要的放電線路由BSD235雙封裝開關驅動。
- CAN唯一識別電路:為了在CAN總線上唯一識別每個連接的電路板,演示板采用了一個8針DIP開關。每個開關引腳通過20 kΩ電阻上拉,提供反向邏輯。用戶可以通過設置DIP開關來為電路板分配唯一的CAN節點ID,最多可在同一CAN/CAN FD總線上設置255個設備。
(二)固件架構
- PSoC? MCU:PSoC? 6系列MCU基于超低功耗架構,采用雙核心Arm? Cortex? - M4和Cortex? - M0 +架構,非常適合電池供電應用。CY8C6245AZI - S3D72設備支持150 MHz的Cortex? - M4F和100 MHz的Cortex? - M0 +,擁有512 KB的應用閃存和256 KB的SRAM,提供了可編程的電源控制和豐富的I/O引腳。
- CAN消息結構:每個CAN消息遵循標準化的CAN協議,由一個唯一的標識符(11位)和數據字節(0 - 64位)組成。在IMR中,僅使用8位作為CAN標識符(ID0 - ID7)來指定電路板的類型和編號,其余3位(ID8 - ID10)保持低電平。每個CAN消息最多可傳輸8個數據字節,包括目標命令、發送者ID和數據。
四、快速啟動指南
(一)軟件部署和調試
固件開發使用ModusToolbox?軟件,通過MiniProg4程序和調試工具(CY8CKIT - 005)進行編程和調試。用戶可以按照以下步驟進行操作:
- 在ModusToolbox?中導入項目。
- 使用庫管理器和設備配置器配置庫和引腳。
- 編譯固件。
- 生成啟動配置。
- 選擇調試選項進行編程和調試。
(二)UART通信調試
用戶可以使用板上指定的調試頭(P1)進行額外的調試。該調試頭提供了獨立的UART通信的RX和TX線路,可通過MiniProg4與調試工具連接。用戶可以使用串口終端(如PuTTY或hterm)讀取接收到的調試消息。
(三)CAN節點標識設置
在固件燒錄完成后,用戶需要使用8針DIP開關S1設置電路板的CAN節點唯一標識。通過設置開關的位置,可以為電路板分配一個唯一的CAN節點ID,方便與其他電路板進行通信。
(四)BMS控制按鈕和LED
演示板提供了幾個按鈕和LED,用于在不使用CAN通信的情況下控制BMS功能。這些按鈕包括啟動、關機和顯示按鈕,LED則用于指示系統的當前狀態,如電源狀態、輸出狀態、警告狀態和通信狀態。
(五)充電和放電
用戶可以使用BMS接口板對BMS系統進行充電和放電。在充電時,需要使用外部充電單元,并將BMS主板上的電阻R1設置為0Ω。在放電時,將電阻R1設置為10 kΩ,系統可作為獨立的電源解決方案為應用供電。
五、物料清單和PCB布局
文檔還提供了演示板的物料清單(BOM),詳細列出了每個組件的制造商、型號、數量和規格。此外,還展示了演示板的PCB布局,包括頂層、內層和底層的視圖,為用戶進行硬件設計和調試提供了參考。
六、總結與展望
英飛凌的DEMO_IMR_BMSCTRL_V1演示板為移動機器人的電池管理提供了一個全面、可靠的解決方案。其豐富的硬件功能和靈活的固件架構使得用戶能夠輕松實現電池的監測、平衡和狀態估計等任務。同時,詳細的快速啟動指南和物料清單也為開發者提供了便利。在未來的移動機器人應用中,我們相信DEMO_IMR_BMSCTRL_V1將發揮更大的作用,為推動移動機器人技術的發展做出貢獻。
作為電子工程師,你是否對DEMO_IMR_BMSCTRL_V1演示板在實際項目中的應用有更多的想法和疑問呢?歡迎在評論區留言交流。
-
電池管理系統
+關注
關注
43文章
608瀏覽量
34997 -
移動機器人
+關注
關注
2文章
819瀏覽量
34906
發布評論請先 登錄
探索 NXP MR - CANHUBK344 評估板:為移動機器人應用賦能
MR-VMU-RT1176快速上手:開啟移動機器人車輛管理單元設計之旅
MR-BMS771參考設計:適用于移動機器人的電池管理系統
Infineon移動機器人電機控制方案深度解析
Infineon DEMO_IMR_BMSPWR_V1:移動機器人電池管理系統的卓越之選
移動機器人“芯”引擎爆發,禾賽、海思新品逆襲

安森美產品如何助力打造下一代自主移動機器人
移動機器人技術的發展歷程
恩智浦自主移動機器人設計要點

瑞芯微 RK3568/3588:為移動機器人注入智慧動力引擎
輪式移動機器人電機驅動系統的研究與開發
移動機器人電機控制DEMO (原理圖+BOM+PCB)
禾賽科技聯手群核科技,打造高精度機器人仿真訓練新方案

安森美在自主移動機器人領域的發展成果
移動機器人電機控制DEMO(原理圖+BOM+PCB)



 工商網監
工商網監
評論