") 自動(dòng)駕駛測(cè)試場(chǎng)景庫(kù)的構(gòu)建及評(píng)價(jià)方法之場(chǎng)景生成方法研究
自動(dòng)駕駛測(cè)試場(chǎng)景庫(kù)的構(gòu)建及評(píng)價(jià)方法之場(chǎng)景生成方法研究

自動(dòng)駕駛測(cè)試場(chǎng)景庫(kù)的構(gòu)建及評(píng)價(jià)方法(二)
場(chǎng)景生成方法研究
一、研究背景
智能網(wǎng)聯(lián)汽車(chē)面臨多維度安全挑戰(zhàn),其中預(yù)期功能安全是重要組成部分。在當(dāng)前階段,智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)正處于前所未有的高速發(fā)展階段。眾多車(chē)企與科研機(jī)構(gòu)投入巨資,致力于技術(shù)創(chuàng)新和產(chǎn)品升級(jí)。盡管如此,伴隨技術(shù)進(jìn)步的同時(shí),安全問(wèn)題頻頻出現(xiàn),不同等級(jí)的智能網(wǎng)聯(lián)汽車(chē)產(chǎn)品,在道路測(cè)試、示范應(yīng)用以及正式上路階段仍然發(fā)生了多起事故,事故發(fā)生的原因多數(shù)是由于自動(dòng)駕駛系統(tǒng)相關(guān)的零部件或者子系統(tǒng)的預(yù)期功能沒(méi)有實(shí)現(xiàn)。
場(chǎng)景對(duì)于自動(dòng)駕駛汽車(chē)的開(kāi)發(fā)和測(cè)試至關(guān)重要。由于自動(dòng)駕駛系統(tǒng)的復(fù)雜性,傳統(tǒng)的基于規(guī)則和基于里程的測(cè)試方法已經(jīng)不適用,需要向基于場(chǎng)景的測(cè)試方法轉(zhuǎn)變。據(jù)美國(guó)蘭德公司研究,從統(tǒng)計(jì)學(xué)角度出發(fā),自動(dòng)駕駛汽車(chē)需要在真實(shí)或者虛擬環(huán)境中至少進(jìn)行110億英里的里程測(cè)試[1],才能證明自動(dòng)駕駛系統(tǒng)比人類(lèi)駕駛員更可靠。測(cè)試場(chǎng)景來(lái)源廣泛,預(yù)期功能安全場(chǎng)景是其中重要的一類(lèi)。通過(guò)預(yù)期功能安全分析獲取盡可能多的相關(guān)場(chǎng)景,這些場(chǎng)景一方面可作為輸入指導(dǎo)系統(tǒng)開(kāi)發(fā),另一方面也是測(cè)試驗(yàn)證的重要依據(jù) 。參考國(guó)內(nèi)外場(chǎng)景架構(gòu)設(shè)計(jì)方法,結(jié)合賽目已有的工程實(shí)踐經(jīng)驗(yàn),提出一種基于關(guān)鍵要素分析的場(chǎng)景搭建框架,主要包含四類(lèi)關(guān)鍵特征,基于上述方法生成的場(chǎng)景既能夠體現(xiàn)觸發(fā)條件,同時(shí)也能夠更好的通過(guò)模擬仿真軟件搭建,便于高效地進(jìn)行自動(dòng)駕駛系統(tǒng)的測(cè)試和驗(yàn)證。
二、研究?jī)?nèi)容
基于標(biāo)準(zhǔn)ISO 21448和GB/T 43267-2023中第4章預(yù)期功能安全活動(dòng)概述和組織,以及第6章的危害識(shí)別和評(píng)估,危害是傷害的潛在來(lái)源,由整車(chē)層面的危害行為導(dǎo)致,場(chǎng)景是傷害發(fā)生的助推因素。參考危害事件模型,如圖1所示,

圖 1標(biāo)準(zhǔn)中的SOTIF危害事件模型
在進(jìn)行危害行為和危害分析之后,需要構(gòu)建場(chǎng)景與危害進(jìn)行“匹配”,進(jìn)而形成可能導(dǎo)致傷害的危害事件,這里構(gòu)建場(chǎng)景的目標(biāo)是為已經(jīng)分析出的危害找到合適的發(fā)生環(huán)境,該環(huán)境包含使危害可導(dǎo)致傷害的條件,該環(huán)境也是推導(dǎo)傷害發(fā)生的助推因素。預(yù)期功能安全場(chǎng)景生成的過(guò)程,也是從未知場(chǎng)景中發(fā)現(xiàn)已知危害場(chǎng)景的過(guò)程。
2.1研究方法
預(yù)期功能安全場(chǎng)景的生成方法主要可分為3個(gè)關(guān)鍵執(zhí)行步驟(見(jiàn)圖2),第一步,建立從危害行為到危害的映射關(guān)系表達(dá),得到關(guān)聯(lián)規(guī)則,形成映射關(guān)聯(lián)表;第二步,對(duì)場(chǎng)景要素進(jìn)行特征分析,進(jìn)行場(chǎng)景要素分類(lèi)及標(biāo)注,形成一個(gè)基于關(guān)鍵場(chǎng)景特征的場(chǎng)景要素標(biāo)注集;第三步,基于第一步建立的關(guān)聯(lián)表,進(jìn)行觸發(fā)條件關(guān)聯(lián),形成帶觸發(fā)條件的危害映射表,然后,匹配危害映射表與場(chǎng)景要素標(biāo)注集,形成危害場(chǎng)景集,該危害場(chǎng)景集也就是預(yù)期功能安全場(chǎng)景。
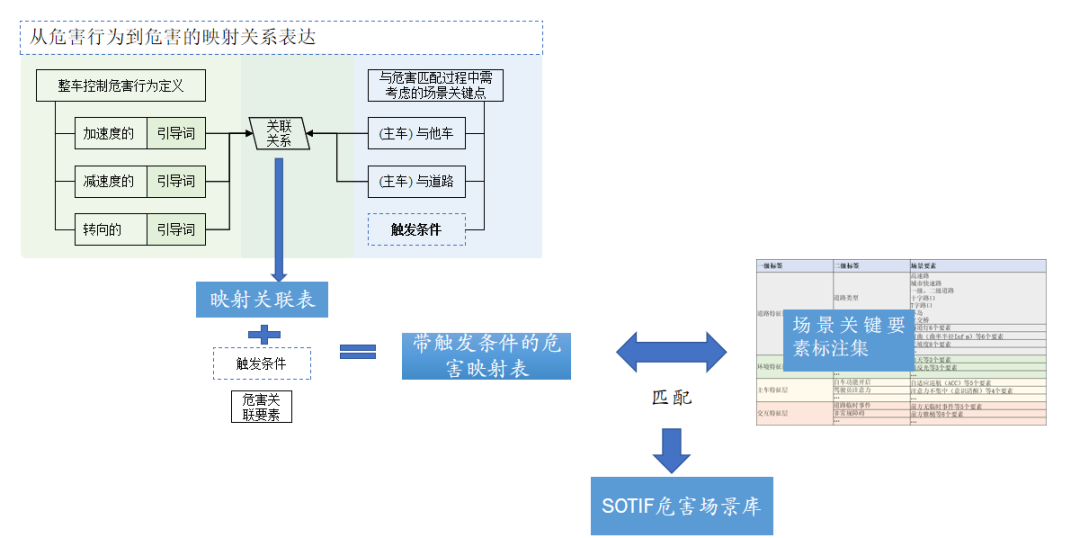
圖 2研究方法總體框圖
(1)從危害行為到危害的映射關(guān)系表達(dá)
首先建立從危害行為到危害事件的映射關(guān)系表達(dá),得到關(guān)聯(lián)規(guī)則,形成映射關(guān)聯(lián)表。
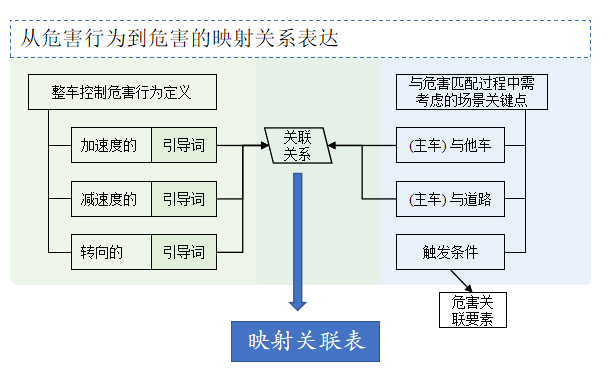
圖 3危害行為映射關(guān)系表達(dá)
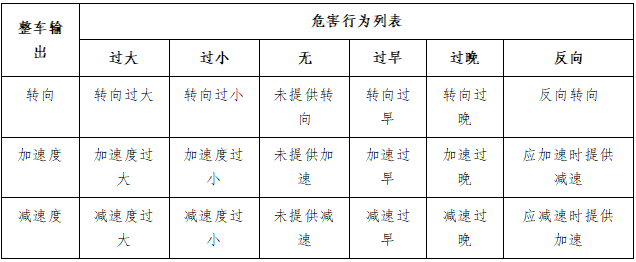
危害行為列表基于整車(chē)控制輸出與引導(dǎo)詞,共計(jì)定義18個(gè)基本的潛在危害行為,見(jiàn)表1.
表1基于引導(dǎo)詞的危害行為表
危害的三個(gè)最底層來(lái)源需要考慮對(duì)交通的危害、對(duì)車(chē)內(nèi)人員的危害、對(duì)道路邊界保持的情況,因此,構(gòu)建六類(lèi)危害:車(chē)內(nèi)人員感到不適、與前車(chē)保持的安全距離過(guò)小、與后車(chē)保持的安全距離過(guò)小、與側(cè)面車(chē)輛的安全距離過(guò)小、與道路邊界過(guò)近。
理論上,像場(chǎng)景一樣,危害依據(jù)不同的考慮范圍,能被定義出無(wú)窮無(wú)盡的類(lèi)型。但本文所定義的危害與危害行為,一個(gè)面向最底層來(lái)源,一個(gè)面向整車(chē)輸出,因此具備與其他不同危害類(lèi)型直接或間接映射的能力,其他各類(lèi)不同危害也都能被納入本文提供的危害列表之中。比如考慮道路覆蓋情況時(shí)可以有車(chē)輛打滑的危害等,該危害可以映射至表1中的加速度/減速度過(guò)小的危害行為,以及與前車(chē)/后車(chē)保持的安全距離過(guò)小(當(dāng)有前后車(chē)時(shí)),或與道路邊界過(guò)近(當(dāng)?shù)缆窞閺澋馈⒒虼蚧瑢?dǎo)致車(chē)輛側(cè)移時(shí))。
危害行為是對(duì)主車(chē)的異常輸出的描述,危害是對(duì)主車(chē)在場(chǎng)景中可能面臨潛在風(fēng)險(xiǎn)的描述,所以從危害行為到危害的映射需要加入對(duì)場(chǎng)景關(guān)鍵點(diǎn)的考慮。與危害匹配過(guò)程中需要考慮的場(chǎng)景關(guān)鍵點(diǎn):分別是主車(chē)與他車(chē)、主車(chē)與道路以及觸發(fā)條件。因此,定義危害行為、危害、場(chǎng)景關(guān)鍵點(diǎn),以確定三者之間的對(duì)應(yīng)和映射關(guān)系。映射關(guān)系可由下式表示:

其中, 表示第i個(gè)危害行為(來(lái)自表1)。
表示第i個(gè)危害行為(來(lái)自表1)。 表示第j個(gè)場(chǎng)景中可關(guān)聯(lián)危害的場(chǎng)景關(guān)鍵點(diǎn),
表示第j個(gè)場(chǎng)景中可關(guān)聯(lián)危害的場(chǎng)景關(guān)鍵點(diǎn), 表示由第i個(gè)危害行為與第j個(gè)場(chǎng)景要素組合產(chǎn)生的第1個(gè)危害。具體,考慮18個(gè)基本的危害行為,以及場(chǎng)景中交通參與者與主車(chē)的相對(duì)位置關(guān)系,以及場(chǎng)景的道路是否彎曲兩類(lèi)關(guān)鍵要素,構(gòu)造危害行為與導(dǎo)致危害場(chǎng)景關(guān)鍵點(diǎn)的關(guān)聯(lián)表,見(jiàn)圖4。
表示由第i個(gè)危害行為與第j個(gè)場(chǎng)景要素組合產(chǎn)生的第1個(gè)危害。具體,考慮18個(gè)基本的危害行為,以及場(chǎng)景中交通參與者與主車(chē)的相對(duì)位置關(guān)系,以及場(chǎng)景的道路是否彎曲兩類(lèi)關(guān)鍵要素,構(gòu)造危害行為與導(dǎo)致危害場(chǎng)景關(guān)鍵點(diǎn)的關(guān)聯(lián)表,見(jiàn)圖4。

圖 4危害行為與導(dǎo)致危害場(chǎng)景關(guān)鍵點(diǎn)的關(guān)聯(lián)表
該表描述了危害行為與危害的關(guān)聯(lián),在關(guān)聯(lián)過(guò)程中考慮了必要的場(chǎng)景要素。這種關(guān)聯(lián)是定性式的,并且以相對(duì)有限的危害行為與危害的組合,關(guān)聯(lián)到了數(shù)量龐大的場(chǎng)景,關(guān)聯(lián)介質(zhì)為場(chǎng)景中的他車(chē)和道路這兩類(lèi)要素。該關(guān)聯(lián)方式可用于構(gòu)建危害的場(chǎng)景集。
(2)基于四類(lèi)場(chǎng)景特征進(jìn)行場(chǎng)景關(guān)鍵要素標(biāo)注
根據(jù)預(yù)期功能安全場(chǎng)景建立的目標(biāo)需求,為已經(jīng)分析出的危害找到合適的發(fā)生環(huán)境,將關(guān)鍵場(chǎng)景特征分為四類(lèi),即四層級(jí)的場(chǎng)景架構(gòu)。
· 第一類(lèi)是道路特征,主要包括場(chǎng)景中的物理基礎(chǔ)設(shè)施,是場(chǎng)景限定范圍內(nèi)的道路結(jié)構(gòu)和道路設(shè)施等要素的合集。
· 第二類(lèi)是環(huán)境特征,是感知行為的重要來(lái)源,環(huán)境特征的要素范圍包含天氣、降水量、風(fēng)力、時(shí)段等。
· 第三類(lèi)是主車(chē)特征,規(guī)定了場(chǎng)景中車(chē)輛的行為,主車(chē)特征的要素范圍包含縱向初速度,位置等。
·第四類(lèi)是交通參與物特征,規(guī)定了參與物的行為與交互關(guān)系,交通參與物特征的要素范圍包含與主車(chē)的交互行為、相對(duì)位置、相對(duì)速度等。
對(duì)上述四類(lèi)場(chǎng)景特征進(jìn)行細(xì)化和拆解后,可得到場(chǎng)景關(guān)鍵要素集以及要素的標(biāo)簽。四類(lèi)場(chǎng)景特征作為一級(jí)標(biāo)簽,可繼續(xù)拆分為35個(gè)二級(jí)標(biāo)簽,二級(jí)標(biāo)簽可繼續(xù)拆分為140個(gè)場(chǎng)景要素,如圖5所示。
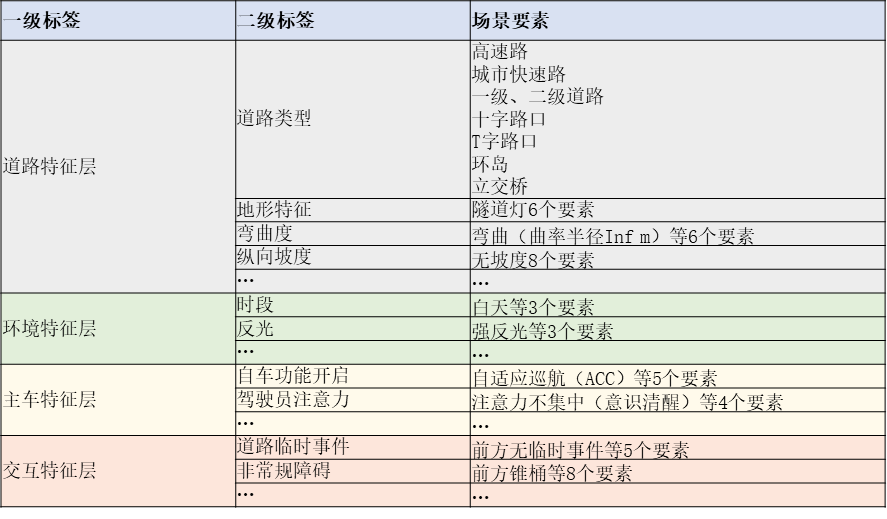
圖 5基于場(chǎng)景四層架構(gòu)的場(chǎng)景關(guān)鍵要素集
由上圖可見(jiàn),其中,第三列的場(chǎng)景要素是場(chǎng)景要素集的最基本組成,要素根據(jù)自身的特征可分為語(yǔ)義要素和數(shù)值要素,語(yǔ)義要素在場(chǎng)景中的描述為有或無(wú),數(shù)值要素在場(chǎng)景中的描述為具體的參數(shù)取值,也是邏輯場(chǎng)景進(jìn)行泛化的待采樣參數(shù)。
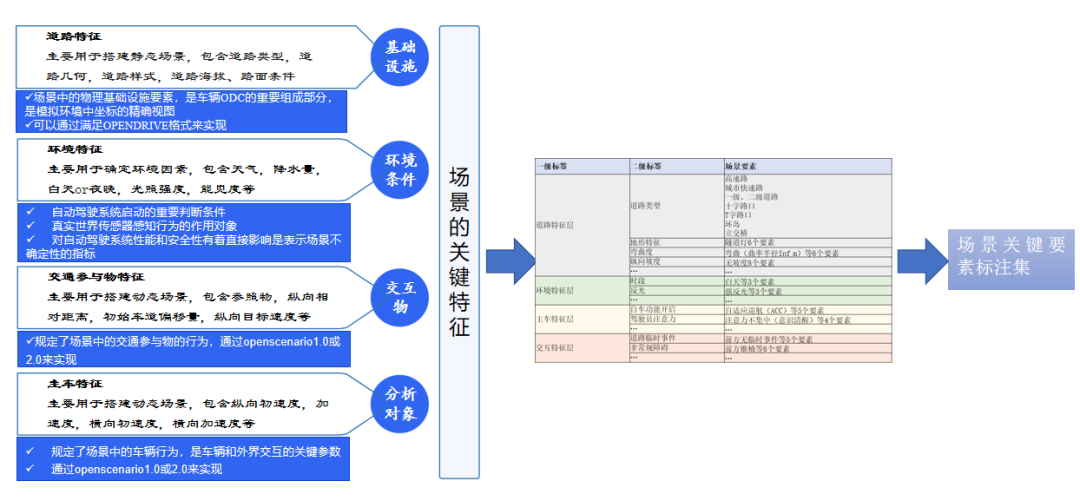
圖 6場(chǎng)景關(guān)鍵要素標(biāo)注集
(3)SOTIF危害場(chǎng)景庫(kù)的構(gòu)建方法
GB/T 43267所提供的鏈路的主要節(jié)點(diǎn)為危害行為、危害、場(chǎng)景,三者存在一定的關(guān)聯(lián)關(guān)系。對(duì)此,前文提出的關(guān)聯(lián)場(chǎng)景和危害的具體流程,可根據(jù)危害行為映射關(guān)聯(lián)表和場(chǎng)景關(guān)鍵要素標(biāo)注集構(gòu)造以危害為導(dǎo)向的測(cè)試場(chǎng)景集,實(shí)現(xiàn)以數(shù)量有限的危害關(guān)聯(lián)匹配出數(shù)量級(jí)較大的危害場(chǎng)景庫(kù),該場(chǎng)景庫(kù)也就是預(yù)期功能安全場(chǎng)景庫(kù)。
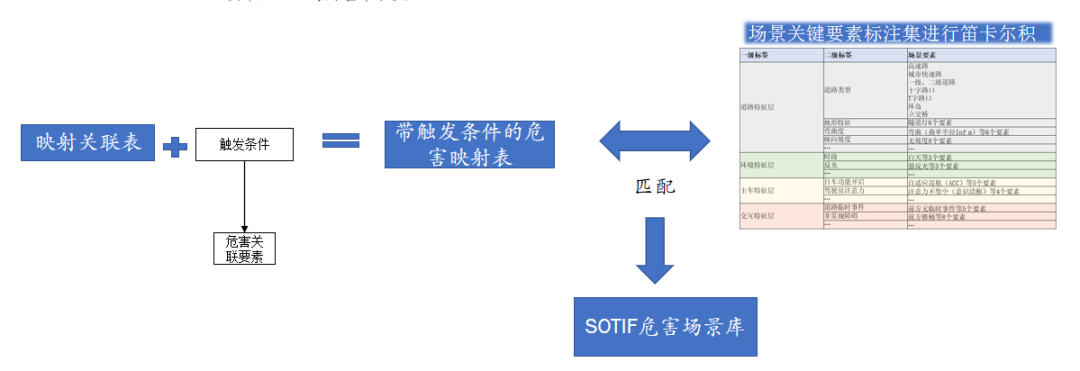
圖 7危害場(chǎng)景庫(kù)生成示意圖
首先,基于已經(jīng)生成的關(guān)聯(lián)表(圖 4),進(jìn)一步將觸發(fā)條件與整車(chē)危害行為的引導(dǎo)詞進(jìn)行關(guān)聯(lián)。該階段的關(guān)聯(lián)旨在細(xì)化危害行為的發(fā)生條件,確保測(cè)試場(chǎng)景集能夠全面覆蓋各種可能的觸發(fā)條件。且通過(guò)與觸發(fā)條件的關(guān)聯(lián)可以以更小的顆粒度匹配邏輯場(chǎng)景中的主要觸發(fā)要素。
場(chǎng)景中的觸發(fā)條件即場(chǎng)景危害關(guān)聯(lián)要素,包括合理可預(yù)見(jiàn)的人為誤用,可以通過(guò)FMEA/FTA/STPA等分析方法得到,這里不展開(kāi)描述。具體觸發(fā)條件要素詳見(jiàn)下表。
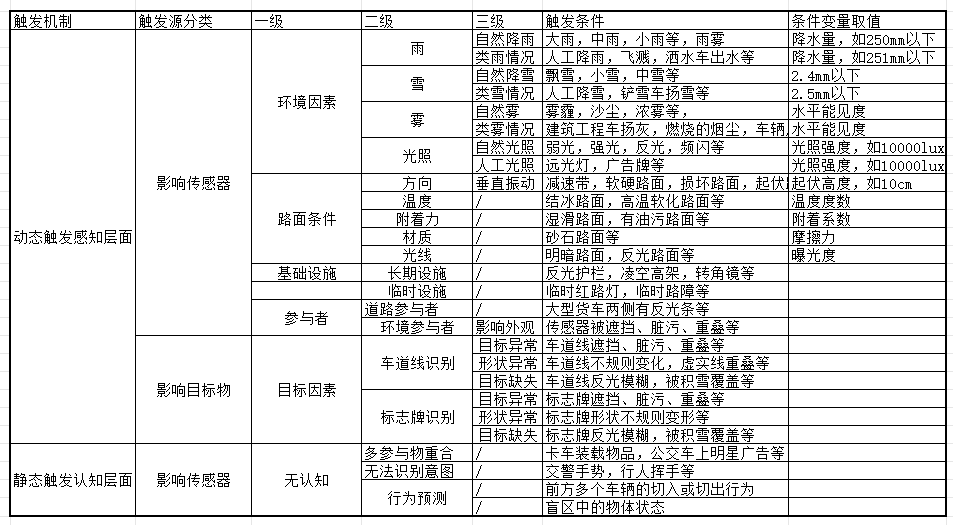
圖 8觸發(fā)條件分類(lèi)體系
然后,基于場(chǎng)景關(guān)鍵要素標(biāo)注集,通過(guò)要素集笛卡爾積的方式進(jìn)行組合生成測(cè)試場(chǎng)景庫(kù)。根據(jù)文章:自動(dòng)駕駛測(cè)試場(chǎng)景庫(kù)的構(gòu)建及評(píng)價(jià)方法(一),“定義場(chǎng)景要素集為S,則有 ,
, 其中
其中 為一級(jí)標(biāo)簽下的場(chǎng)景要素子集,
為一級(jí)標(biāo)簽下的場(chǎng)景要素子集, 為二級(jí)標(biāo)簽下的場(chǎng)景要素子集。定義危害關(guān)聯(lián)要素為
為二級(jí)標(biāo)簽下的場(chǎng)景要素子集。定義危害關(guān)聯(lián)要素為 。進(jìn)而,一個(gè)關(guān)聯(lián)危害的場(chǎng)景庫(kù)Sces可以表示為:
。進(jìn)而,一個(gè)關(guān)聯(lián)危害的場(chǎng)景庫(kù)Sces可以表示為:

其中,“X”表示笛卡爾積。”在對(duì)場(chǎng)景要素集進(jìn)行組合時(shí),同時(shí)對(duì)場(chǎng)景要素進(jìn)行標(biāo)注,包括要素的頻率、風(fēng)險(xiǎn)性、復(fù)雜性標(biāo)注,并將對(duì)要素標(biāo)注的結(jié)果繼承至由其組合成的場(chǎng)景中。最終,形成一個(gè)基于關(guān)鍵場(chǎng)景特征分析的場(chǎng)景庫(kù)。
最后,將上述形成的場(chǎng)景庫(kù)中的場(chǎng)景與危害、危害行為進(jìn)行匹配,從形成的場(chǎng)景庫(kù)中篩選出與特定危害或危害行為相匹配的場(chǎng)景,進(jìn)而構(gòu)建出一個(gè)面向某個(gè)特定危害的測(cè)試場(chǎng)景集。該測(cè)試場(chǎng)景集可以包含特定的潛在危害行為與危害,也能夠反映出這些危害在不同條件下可能發(fā)生的具體場(chǎng)景,最終得到SOTIF危害場(chǎng)景庫(kù)。
2.2.研究方法的優(yōu)勢(shì)
以上的研究方法不僅能夠充分地描述場(chǎng)景,還涵蓋了觸發(fā)條件,并且便于搭建。
首先,四大類(lèi)特征的提取能夠充分的描述場(chǎng)景。4大類(lèi)特征的提取可以全面地描述車(chē)輛所處的場(chǎng)景,能夠表達(dá)自動(dòng)駕駛車(chē)輛在多種路況下應(yīng)對(duì)的多變的環(huán)境條件和交通狀況;自動(dòng)駕駛算法需要處理大量的環(huán)境數(shù)據(jù),以確保自動(dòng)駕駛車(chē)輛能夠安全、高效地行駛,以及在行駛過(guò)程中,車(chē)輛可能會(huì)遇到的情況:如不同道路類(lèi)型,變化的交通狀況,多樣的天氣條件以及各種潛在的障礙物。有效的特征提取能夠從原始數(shù)據(jù)中提煉關(guān)鍵信息。
其次,四大類(lèi)特征的提取能夠涵蓋觸發(fā)條件。特征的提取對(duì)于理解和預(yù)測(cè)觸發(fā)條件至關(guān)重要,這些提取的特征是一個(gè)多層次、多維度的信息處理過(guò)程,是分析觸發(fā)機(jī)制的重要參考。
最后,四大類(lèi)特征的提取易于模擬仿真的實(shí)現(xiàn)。道路特征可以通過(guò)滿(mǎn)足OpenDRIVE格式來(lái)實(shí)現(xiàn),通過(guò)特征提取,可以構(gòu)建出精確的道路模型,并在仿真環(huán)境中加載這些模型來(lái)模擬真實(shí)的道路情況。交通參與物特征及主車(chē)特征可以通過(guò)OpenSCENARIO來(lái)實(shí)現(xiàn),可以設(shè)置不同類(lèi)型交通參與物的速度、加速度、路線、交互規(guī)則等參數(shù),例如,可以創(chuàng)建一個(gè)場(chǎng)景,其中包含多個(gè)車(chē)輛在不同車(chē)道上行駛,并且根據(jù)交通燈信號(hào)或其他車(chē)輛的存在進(jìn)行加速或減速。同時(shí),可以定義主車(chē)的傳感器配置、感知范圍、決策邏輯等,例如,可以模擬主車(chē)識(shí)別前方的障礙物并執(zhí)行換道操作,或者根據(jù)交通信號(hào)調(diào)整速度。環(huán)境特征可以使用工具進(jìn)行更豐富的環(huán)境模擬,例如,可以設(shè)置不同的天氣情況,觀察其對(duì)傳感器性能和車(chē)輛行為的影響。
三、典型案例
該章節(jié)提供了一種在給定危害行為下的潛在危害與危害場(chǎng)景集生成的執(zhí)行案例。
根據(jù)上述方法的執(zhí)行步驟,如下:
(1)從危害行為到危害的映射關(guān)系表達(dá)
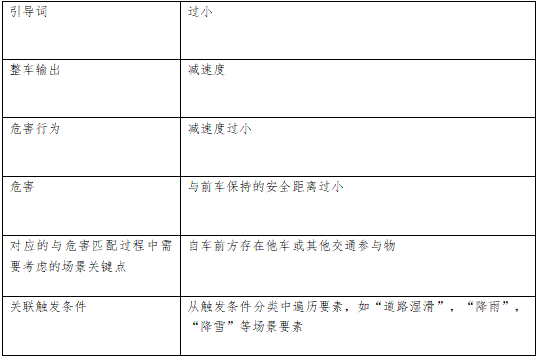
根據(jù)引導(dǎo)詞“過(guò)小”,結(jié)合整車(chē)輸出的“減速度”,得出當(dāng)給定危害行為為減速度過(guò)小時(shí),系統(tǒng)遍歷危害行為映射關(guān)聯(lián)表,該危害行為可關(guān)聯(lián)危害為“與前車(chē)保持的安全距離過(guò)小”;對(duì)應(yīng)的危害匹配過(guò)程中需要考慮的場(chǎng)景關(guān)鍵點(diǎn)是“自車(chē)前方存在他車(chē)或其他交通參與物”。
(2)基于四類(lèi)場(chǎng)景特征進(jìn)行場(chǎng)景關(guān)鍵要素標(biāo)注
基于四類(lèi)場(chǎng)景特征篩選場(chǎng)景要素進(jìn)行笛卡爾積,得到組合后的場(chǎng)景關(guān)鍵要素標(biāo)注集。例如:
(3)SOTIF危害場(chǎng)景庫(kù)的構(gòu)建方法
關(guān)聯(lián)觸發(fā)條件:引導(dǎo)詞“過(guò)小”代表自車(chē)的實(shí)際輸出由于場(chǎng)景中的抑制條件,使得其比預(yù)期輸出要小,場(chǎng)景抑制條件可以是摩擦系數(shù)變小的抑制,比如“道路濕滑”、“降雨”、“降雪”等場(chǎng)景要素。這些要素在場(chǎng)景要素集中已被預(yù)先標(biāo)記為潛在的觸發(fā)條件要素;根據(jù)觸發(fā)條件分類(lèi)表進(jìn)行生成帶觸發(fā)條件的危害映射表,如下:
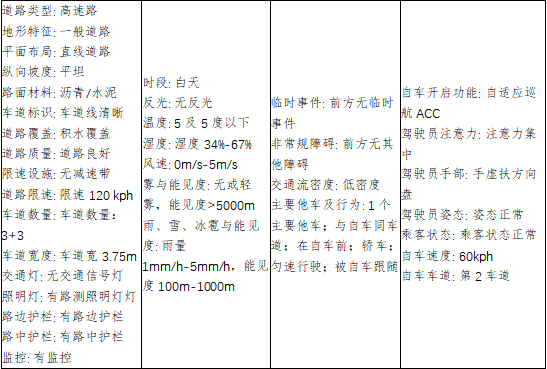
將上面形成的表格中的內(nèi)容與場(chǎng)景關(guān)鍵要素標(biāo)注集進(jìn)行匹配,構(gòu)建該危害對(duì)應(yīng)的危害場(chǎng)景庫(kù),場(chǎng)景庫(kù)見(jiàn)圖9。
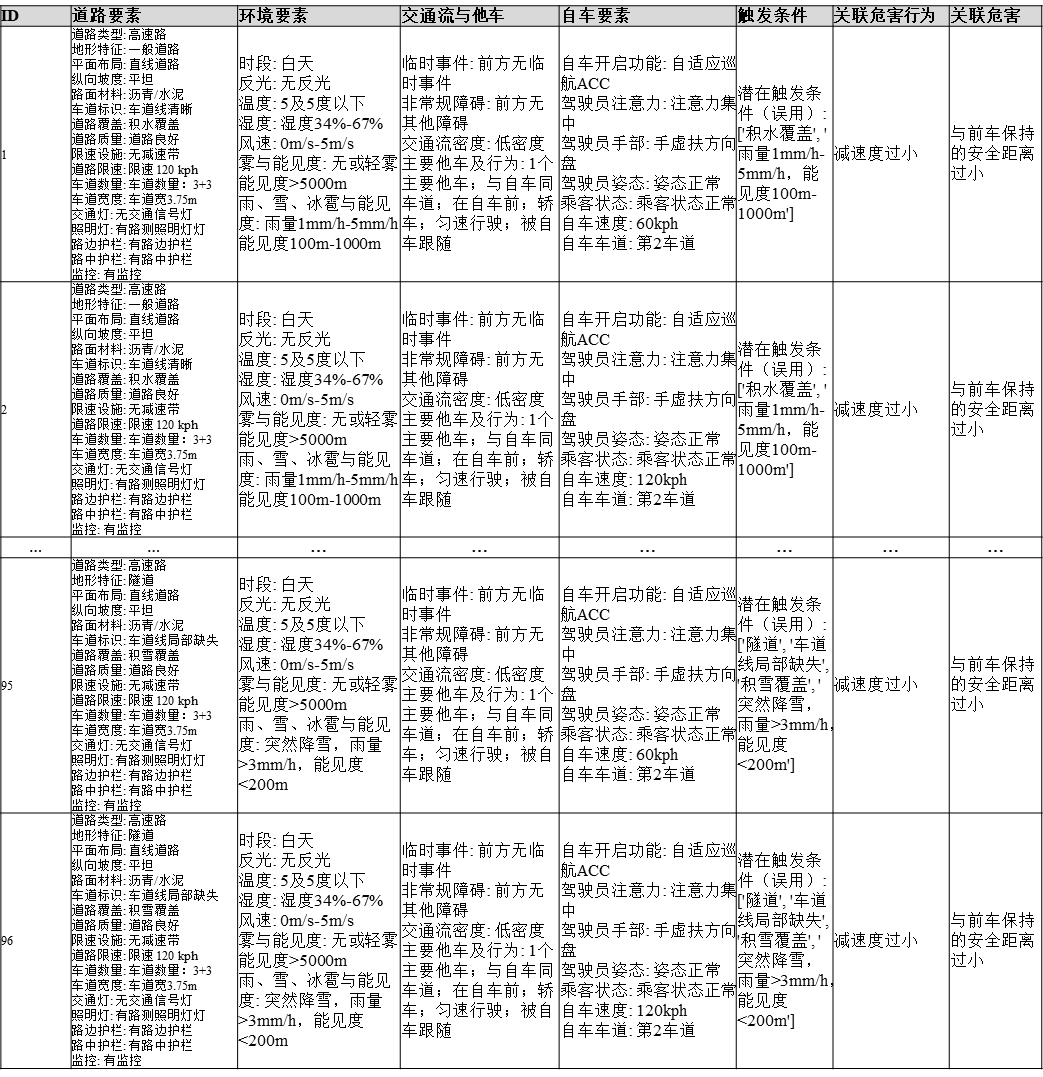
圖 9危害場(chǎng)景庫(kù)(部分)
由上圖可見(jiàn),所構(gòu)建的危害場(chǎng)景庫(kù)涵蓋了對(duì)危害行為“減速度過(guò)小”及其關(guān)聯(lián)的危害“與前車(chē)保持的安全距離過(guò)小”的致傷條件和潛在觸發(fā)要素,即在該場(chǎng)景集中,有較大概率會(huì)使得自動(dòng)駕駛汽車(chē)出現(xiàn)該危害行為并引發(fā)所對(duì)應(yīng)的危害。
通過(guò)Sim Pro仿真工具,將上述步驟分析得出的場(chǎng)景進(jìn)行仿真驗(yàn)證。
參考資料
[1]https://www.rand.org/pubs/articles/2016.html
[2] GB/T 43267-2023 道路車(chē)輛—預(yù)期功能安全 [S]
[3]ASAM.OpenSCENARIO[EB/OL].https://www.asam.net/standards/detail/openscenario/, [日期: 2024-08-01].
[4] 中國(guó)智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)創(chuàng)新聯(lián)盟. 智能網(wǎng)聯(lián)汽車(chē)預(yù)期功能安全場(chǎng)景要素及管理要求: T/CSAE 336-2023[S]. 北京: 中國(guó)汽車(chē)工程學(xué)會(huì), 2023.
[5]ISO21448-2022SOTIF,Safetyof The Intended Functionality [S]
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14952瀏覽量
181095 -
智能網(wǎng)聯(lián)汽車(chē)
+關(guān)注
關(guān)注
9文章
1307瀏覽量
31901
原文標(biāo)題:自動(dòng)駕駛測(cè)試場(chǎng)景庫(kù)的構(gòu)建及評(píng)價(jià)方法(二)丨場(chǎng)景生成方法研究
文章出處:【微信號(hào):gh_c85a8e3c0f2a,微信公眾號(hào):賽目科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
賽目科技Sim Pro賦能自動(dòng)駕駛算法評(píng)價(jià)體系構(gòu)建

Sim?Pro 實(shí)現(xiàn)仿真測(cè)試場(chǎng)景全量構(gòu)成

自動(dòng)駕駛仿真測(cè)試場(chǎng)景生成方法:從技術(shù)突破到工程落地的全維度解析
自動(dòng)駕駛場(chǎng)景生成方法及優(yōu)選方案:康謀aiSim 3DGS方案重塑行業(yè)標(biāo)準(zhǔn)
如何高效構(gòu)建與測(cè)試非結(jié)構(gòu)化道路場(chǎng)景?


場(chǎng)景仿真:森林地圖+ 車(chē)輛行駛效果演示# 仿真# 建模# 地圖# 場(chǎng)景# 汽車(chē)# 自動(dòng)駕駛# 測(cè)試# 智能駕駛
如何選擇適合的智駕仿真工具進(jìn)行場(chǎng)景生成和測(cè)試?
自動(dòng)駕駛數(shù)據(jù)采集時(shí)間同步指南:方法、挑戰(zhàn)、場(chǎng)景與康謀解決方案
講講如何閉環(huán)自動(dòng)駕駛仿真場(chǎng)景,從重建到可用?

無(wú)引導(dǎo)線的左轉(zhuǎn)場(chǎng)景下,自動(dòng)駕駛如何規(guī)劃軌跡?

自動(dòng)駕駛汽車(chē)如何處理“鬼探頭”式的邊緣場(chǎng)景?

生成式 AI 重塑自動(dòng)駕駛仿真:4D 場(chǎng)景生成技術(shù)的突破與實(shí)踐

自動(dòng)駕駛技術(shù)測(cè)試有哪些?

搭建完整的ADAS測(cè)試鏈路,推動(dòng)自動(dòng)駕駛技術(shù)的安全發(fā)展



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論