 如何選擇適合的智駕仿真工具進行場景生成和測試?
如何選擇適合的智駕仿真工具進行場景生成和測試?

在自動駕駛技術日益發展的背景下,選擇合適的智駕仿真工具進行場景生成和測試顯得尤為重要。該工具不僅需要支持高精度的場景重建,還需滿足多種環境條件和傳感器模型的兼容性。本文將深入探討如何評估不同智駕仿真工具的性能與特點,以幫助開發者優化自動駕駛系統的測試效率與安全性。
在選擇適合的智駕仿真工具進行場景生成和測試時,開發者需要對工具的多項特性進行全面理解和評估。
首先,高精度場景重建是一項基礎要求,它能夠真實模擬各種駕駛條件,從而提升測試的有效性和可靠性。
其次,工具需具備良好的兼容性,支持不同類型的傳感器模型,如激光雷達、攝像頭等,以便在多變的環境條件中進行準確測試。
同時,對于場景生成的速度和靈活性也不容忽視,能夠快速調整生成環境以應對不同測試需求將極大提高工作效率。
此外,多樣化的場景應涵蓋城市、郊區、高速道路等多種駕駛環境,確保開發者能夠全面評估自動駕駛系統在各種情況下的表現。因此,這些特征構成了開發者選擇和評估智駕仿真工具時的重要依據。
如何深入評估智駕仿真工具的場景生成能力?
評估智駕仿真工具的場景生成能力,是確保自動駕駛系統安全性的前提。首先,應關注其高精度場景重建技術,包括對不同天氣、光照和交通條件的模擬能力。其次,工具應具備靈活的場景編輯功能,便于開發者根據實際需求自定義測試環境。此外,對生成場景的多樣性和復雜性的評估同樣重要,例如在高速公路、城市道路和鄉村公路等不同場景中的表現。開發者還應重視仿真工具對各類傳感器模型的兼容性,以保證全面覆蓋各種駕駛情境和應對復雜環境變化。因此,在選擇適合的智駕仿真工具時,綜合考慮上述因素將有助于提高自動駕駛系統的測試效率與安全性。
選擇智駕仿真平臺時需注意的關鍵特性
在選擇用于場景生成和測試的智駕仿真工具時,有幾個關鍵特性值得特別關注。首先,高精度場景重建能力是必須的,能確保模擬環境能夠真實反映實際駕駛條件。這對于驗證自動駕駛系統的精確度至關重要。此外,仿真工具需具備良好的兼容性,支持多種傳感器模型和環境條件,如天氣變化與光照狀況。這樣的靈活性能夠大大提升測試的覆蓋面與有效性。
在選擇平臺時,開發者應特別注意這些特性,以確保所選工具能夠在各種復雜場景下進行有效測試,從而提高自動駕駛系統的安全性與性能表現。
高精度場景重建對自動駕駛測試的重要性
高精度的場景重建在自動駕駛測試中扮演著關鍵角色。隨著自動駕駛技術的持續進步,要求仿真工具具備能真實再現路況和環境變化的能力。這種能力不僅能提升測試的可靠性,還能確保系統在不同條件下的表現。特別是在復雜天氣和交通環境中,高精度重建能夠有效捕捉到真實世界中的微小變化,從而為功能驗證提供更可靠的數據支持。
以下表格概述了高精度場景重建在不同場景下的重要影響:
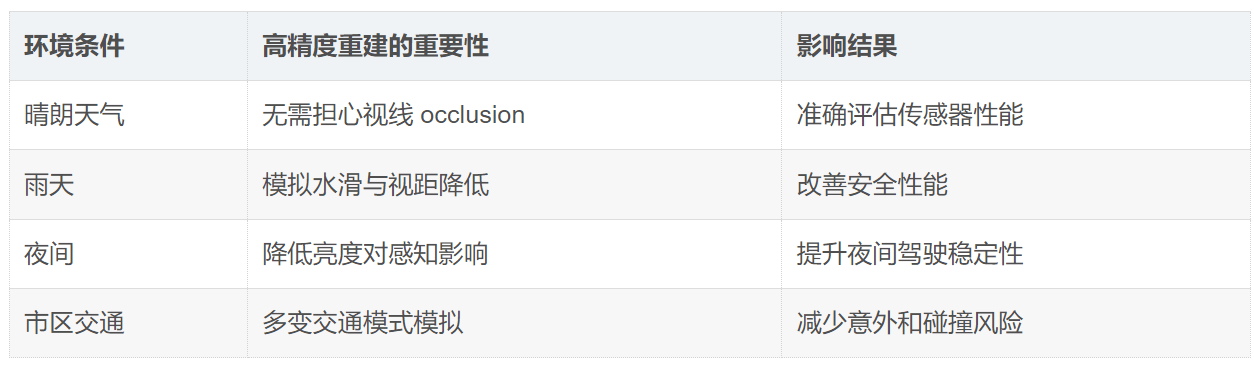
這種精準的仿真能力不僅幫助開發團隊識別潛在問題,還能為未來的需求變化做好準備。此外,借助高精度場景重建,開發者能夠更有效地優化其自動駕駛系統,提高整體安全性與行駛效率。
兼容多種傳感器模型的智駕仿真工具推薦
在選擇智駕仿真工具時,兼容性是一個關鍵考量因素。
工具需支持多種傳感器模型,如激光雷達、攝像頭和雷達,以確保在不同測試場景下進行有效驗證。例如,某些仿真平臺能夠整合多種傳感器的輸出,實現不同數據源的融合,提升場景生成的真實感與準確性。此外,這些工具通常兼容如OpenDRIVE和OpenSCENARIO等行業標準,從而加強了不同系統之間的信息交流與集成能力。
在這方面,廣泛應用于行業的aiSim平臺便以其高兼容性和靈活性受到開發者的青睞,為自動駕駛系統測試提供了強有力的支持。選擇那些具備強大傳感器模型集成能力的智駕仿真工具,將有助于進一步提升自動駕駛技術的研發效率與安全水平。
案例分享:多樣環境下的智駕仿真應用
在自動駕駛研發過程中,選擇合適的智駕仿真工具進行場景生成至關重要。
以aiSim平臺為例,該平臺能夠生成多樣化的測試場景,包括城市、郊區及高速公路。在真實駕駛環境中,不同天氣狀況和光照變化對車輛操作性能影響深遠,因此其具備的高精度場景重建功能尤為重要。通過仿真工具制作的測試場景,可有效模擬各種路況與環境條件,從而為開發者提供全方位評估其自動駕駛系統的機會。此外,這些工具支持多傳感器模型,確保數據收集的全面性,提升測試效率與結果可靠性。通過這樣的案例分析,可以更好地理解在日益復雜的自動駕駛實際應用中,智駕仿真工具所扮演的重要角色。
實時高復雜度場景測試的技術挑戰與解決方案
在自動駕駛系統的開發中,實時高復雜度場景測試是一項重要任務,它面臨著多種技術挑戰。
首先,隨著傳感器的不斷升級,識別目標和處理環境信息的需求日益增加,這要求采用更為先進的數據處理能力。其次,場景生成必須能夠模擬多個動態因素,例如交通流、天氣變化和路況多樣性,這些因素對測試結果有著顯著影響。因此,選擇支持高精度場景重建和多變量動態交互的智駕仿真工具顯得尤為重要。針對這些挑戰,一些解決方案應運而生,如集成物理引擎進行場景建模,以及采用模塊化設計以便快速適配不同傳感器模型。這些策略不僅可以提升測試效率,還能增強自動駕駛系統在實際道路環境中的表現能力,從而更好地應對復雜現實情況。
探索自動駕駛系統優化的智駕仿真工具
在自動駕駛領域,選擇合適的智駕仿真工具對于提升系統的性能至關重要。這些工具不僅需要具備強大的場景生成能力,還能實現高精度的場景重建。這種精確度能夠模擬真實世界中的各種環境條件,從而為測試提供更為嚴謹的依據。此外,兼容多種傳感器模型是另一項關鍵特性,這確保了系統在不同傳感器配置下的測試效果。近年來,一些先進的智駕仿真工具擁有了集成化的平臺,使得開發者可以輕松切換不同場景,實現多樣化測試,進一步優化自動駕駛技術的開發進程。同時,面對復雜場景生成時,如何有效地利用這些工具進行測試,將直接影響到自動駕駛系統在實際應用中的表現。
結論
選擇合適的智駕仿真工具進行場景生成和測試,對于自動駕駛系統的研發至關重要。開發者需要深入理解不同工具在高精度場景重建和環境模擬方面的能力,以確保測試結果的可靠性。在評估過程中,必須關注這些工具對各種傳感器模型的兼容性,以及它們是否能有效應對多樣化的環境條件。此外,隨著自動駕駛技術的發展,實時高復雜度場景測試所面臨的技術挑戰亟待解決,這也進一步凸顯了智駕仿真工具的重要性。通過科學合理的選擇與使用,可以大幅提高自動駕駛系統的開發效率與安全性,為未來的發展打下堅實基礎。
審核編輯 黃宇
-
仿真
+關注
關注
55文章
4526瀏覽量
138588
發布評論請先 登錄
半導體嵌入式單元測試的核心技術、工具選型與落地全流程
賽目科技Sim Pro工具助力國標仿真測試流程規范落地

Sim?Pro 實現仿真測試場景全量構成

自動駕駛仿真測試場景生成方法:從技術突破到工程落地的全維度解析
自動駕駛場景生成方法及優選方案:康謀aiSim 3DGS方案重塑行業標準
邁向智駕高階驗證:康謀高保真HIL仿真解決方案,重塑測試價值

康謀直播Q A | 康謀智駕仿真測試,共筑智駕安全的「信任密碼」!
C語言單元測試在嵌入式軟件開發中的作用及專業工具的應用
CPU的幾種復位方式適合哪些場景?
英飛凌IPOSIM平臺加入基于SPICE的模型生成工具,助力提升系統級仿真精度

嵌入式軟件測試與專業測試工具的必要性深度解析
如何選擇適合特定應用場景的電能質量在線監測裝置?
如何選擇適合特定應用場景的隔離模塊?
如何選擇適合自己項目的通信協議評估工具?

生成式 AI 重塑自動駕駛仿真:4D 場景生成技術的突破與實踐




 工商網監
工商網監
評論