 如何高效構建與測試非結構化道路場景?
如何高效構建與測試非結構化道路場景?

01 引言
隨著智能駕駛仿真測試等技術的快速發展,行業評估體系已從單一的“測試里程數”向更全面的“場景覆蓋度”及“邊緣場景”檢驗演進。在此趨勢下,實車測試向仿真環境遷移已成為提升驗證效率與安全的必然選擇。統計數據表明,一套成熟的自動駕駛算法驗證通常遵循“99.9%仿真測試+0.09%封閉場地測試+0.01%公開道路測試”的黃金比例[1]。
然而,當前市場上主流的仿真工具所構建的場景,大多集中于結構清晰、標線完整的規范化道路環境,如城市高架、筆直高速及標準停車場。這些“結構化道路”雖然是現代路網的重要組成部分,卻遠未涵蓋真實世界路況的多樣性。當智駕系統需要向更高階的L3、L4級別邁進,或當車輛需進入礦區、鄉野、山地等特殊區域時,那些缺乏清晰車道線、路面起伏不平的“非結構化道路”,便成為制約系統實際落地與可靠運行的關鍵瓶頸。
因此,實現高效、真實且可擴展的非結構化道路仿真能力,已成為當前智能駕駛測試驗證領域的核心挑戰與迫切需求。在此背景下,本文旨在系統闡述非結構化道路仿真的必要性、當前面臨的技術難點及其解決方案。
02 非結構化道路測試必要性
在傳統的ODD(運行設計域)定義中,非結構化道路常被歸類為“特定場景”。然而在實際交通環境中,城鄉結合部、復雜山路、臨時施工路段以及各類園區內部道路等場景占有相當比例。
對智駕算法而言,結構化道路具備高精地圖先驗信息、清晰的車道線與規范交通標志,測試條件相對明確。而非結構化道路則缺乏此類結構化信息,系統必須完全依靠自身感知與決策能力:
車道標識缺失或模糊:車輛需依賴視覺、雷達等多源數據實時判斷可行駛區域,無法直接依賴車道線進行跟蹤。
道路幾何形狀復雜:與高速公路平緩線形不同,鄉村或山地道路常包含急彎、連續彎道乃至之字形坡道,對車輛動力學控制與軌跡規劃提出更高要求。
地形與環境因素耦合顯著:在非結構化道路上,路面常存在起伏、坑洼、混合材質等情況,形成復雜的三維實體結構,影響車輛通過性與控制穩定性。
若仿真測試僅局限于理想化道路環境,則系統在真實復雜路況中可能因無法識別道路邊界或應對突發顛簸而產生預期外的行為。因此,針對非結構化道路的仿真測試并非功能補充,而是實現自動駕駛系統從基礎功能到魯棒性提升的必經環節。
03 非結構化道路仿真難點
目前主流仿真地圖生成多依賴于OpenDRIVE等標準格式或內部定制格式。這類格式主要針對結構化道路設計,擅長描述車道拓撲、連接關系與路口結構(左車道是誰,右車道是誰,路口組成是怎樣的)。
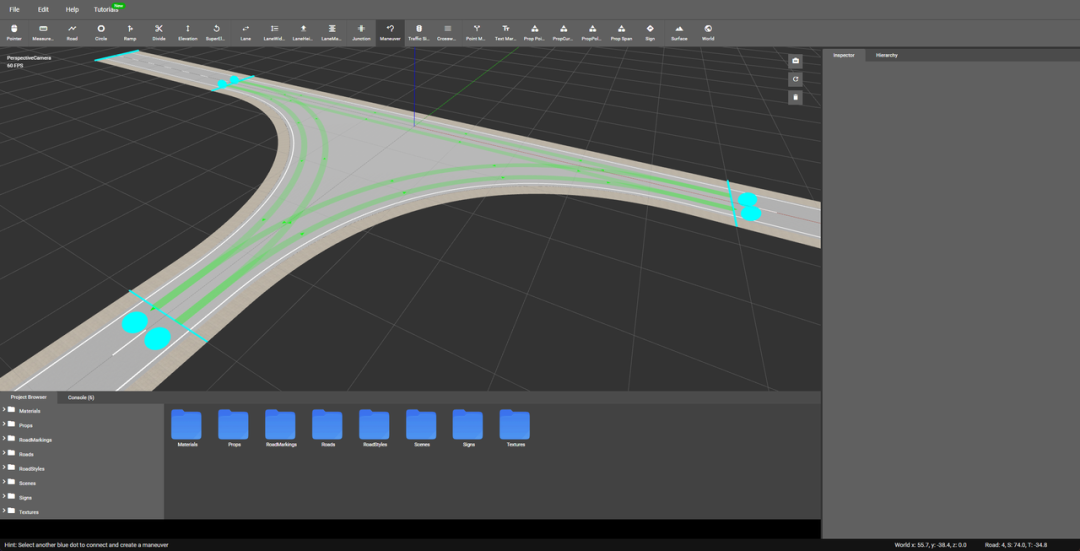
道路編輯器示例
然而,當需要描述依山而建、邊緣不規則、表面存在隨機破損的土路時,現有格式往往顯得不足:
難點一:地形建模能力有限。傳統高精地圖導入仿真后多為平面投影,缺乏高程與路面形態細節,車輛動力學反饋仍基于平坦路面假設,難以真實反映坡度與起伏的影響。
難點二:場景編輯靈活性不足。若要在仿真中構建包含混合路況的極端測試場景,通常需要借助專業三維建模工具從零開始建造,此類模型往往缺失道路邏輯信息,導致難以進行場景交互測試與系統性驗證。
由此形成當前仿真測試的兩難局面:要么使用具有完整邏輯路網但缺乏真實地形表現的“理想道路”,要么采用外觀逼真卻難以嵌入測試邏輯的純視覺場景。
針對上述問題,aiSim通過集成外部三維編輯工具,建立了一套高效的工作流程,實現邏輯路網與高真實感地形的有機結合。其核心流程包括:OpenDRIVE導入 → Atlas地圖轉換 → Unreal/Blender編輯 → Atlas地圖導出 → aiSim高保真仿真運行。
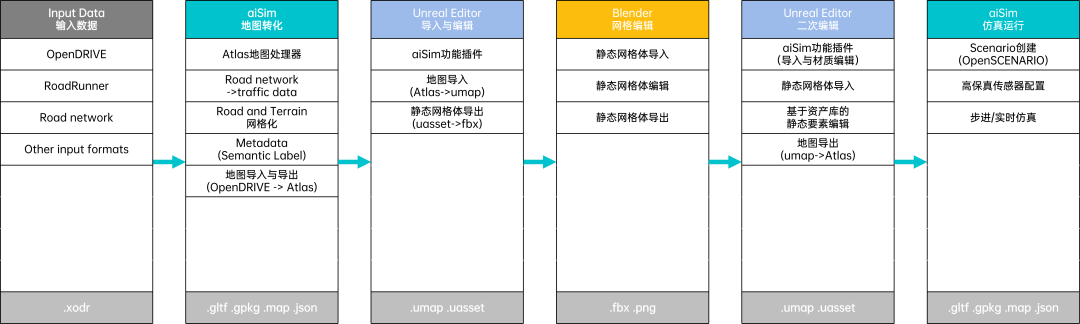

基礎數據轉換:從OpenDRIVE到Atlas
aiSim支持直接導入行業通用的OpenDRIVE格式地圖,并將其轉化為內置的Atlas地圖格式。
Atlas格式同時保留道路網絡、語義標簽、交通信息與地形數據,使得原始地圖具備可通過編輯工具進行地形深化處理的擴展能力。
靈活地形編輯:Unreal Editor與Blender的協同
通過aiSim插件,用戶可在Unreal Editor中直接調用地圖資源,并借助Blender進行網格編輯,實現對道路幾何與地表形態的精細化調整:
- 大范圍地形重塑:在UE或Blender中重新分配地形網格,通過拖拽、變形及參數化方式生成多樣化的地勢起伏。
- 路面細節刻畫:使用Blender可模擬路面裂縫、隆起、車轍等局部特征,這些特征不僅體現為視覺紋理,同時可具備物理碰撞屬性與材質特性。
閉環測試驗證:高保真傳感器與物理仿真
編輯后的非結構化道路地圖可直接被導入aiSim仿真器,并結合高保真仿真傳感器進行場景方針:
- 車輛動力學反饋:在地圖編輯過程中定義的路面坑洼、坡度變化將直接影響車輛模型的狀態輸出,車輪響應、車身姿態等行為均可以得到準確模擬。
- 感知系統仿真:結合aiSim的高保真傳感器模型,可復現雷達在碎石路面產生的復雜點云模式、攝像頭在顛簸條件下的卷簾快門效應等圖像效果。配合語義標簽信息,能夠為感知算法驗證提供準確的基準真值。
05 結語
總而言之,aiSim可以說是為智駕測試提供了一條有效應對復雜道路環境的編輯路徑。無論是鄉村土路或礦山坡道,使用者無需完全依賴成本高昂的實地采集與高風險實車測試。
此外通過OpenDRIVE至Atlas的邏輯轉換,結合Unreal Editor與Blender的編輯能力,即可在仿真環境中構建各類具有挑戰性的非結構化道路場景,為自動駕駛算法的完善與驗證提供有效支撐。
▍關于康謀科技
康謀是一家自動駕駛解決方案供應商(前身是虹科自動駕駛事業部)。
我們以數據為驅動力,提供高性能的數據采集、記錄、傳輸方案,針對各種駕駛場景進行精準的仿真模擬,以及對大量自動駕駛數據進行高效、高質量處理。我們的一站式服務能夠滿足自動駕駛領域研發測試的全流程需求。
通過深入了解客戶需求,結合行業最新技術和趨勢,我們致力于為客戶提供最適配的自動駕駛解決方案,助力客戶在自動駕駛領域取得更大突破。
-
測試
+關注
關注
9文章
6201瀏覽量
131345 -
智能駕駛
+關注
關注
5文章
3008瀏覽量
51280 -
仿真測試
+關注
關注
0文章
115瀏覽量
11792
發布評論請先 登錄
結構化布線系統有哪些難題
MaxCompute(ODPS)上處理非結構化數據的Best Practice
TrustZone結構化消息是什么?
一種結構化道路環境中的視覺導航系統詳解
改進區域生長的非結構化道路識別
海量非結構化數據存儲難題 ,杉巖數據對象存儲完美解決
使用貝葉斯決策和Hough實現非結構化道路檢測與障礙物識別算法
怎么樣使用機器視覺技術和支持向量機實現非結構化道路的檢測

如何在Pixie中收集大量非結構化數據
分布式融合存儲解決方案驅動非結構化數據多模計算

CFD 設計利器:結構化和非結構化網格的組合使用





 工商網監
工商網監
評論