") 特斯拉帶火“端到端”智駕,國內(nèi)車企加速上車
特斯拉帶火“端到端”智駕,國內(nèi)車企加速上車

2024年1月,特斯拉開始大規(guī)模推送FSD V12,從此“端到端”智能駕駛在汽車行業(yè)興起。小鵬、理想、智已、商湯等公司也紛紛推出自家的端到端智駕方案。
特斯拉的FSD是一套包含感知、規(guī)控、執(zhí)行在內(nèi)的全鏈路自動(dòng)駕駛軟硬件架構(gòu)。而FSDV12采用的“端到端”的自動(dòng)駕駛系統(tǒng),能夠高度模擬人類駕駛行為,實(shí)現(xiàn)感知決策一體化。近日,特斯拉正式亮相的Robotaxi車型Cybercab,取消了方向盤、踏板和后視鏡,高度依賴于特斯拉的FSD完全自動(dòng)駕駛能力。
“端到端”最鮮明的特點(diǎn)便是基于AI模型對(duì)從傳感器到處理器、執(zhí)行指令等進(jìn)行判斷,不需要人為干預(yù)中間步驟。當(dāng)前各家端到端的技術(shù)路線有所不同,都在積極探索。行業(yè)人士指出,預(yù)計(jì)2025年國內(nèi)自動(dòng)駕駛端到端方案大規(guī)模量產(chǎn)上車。
理想
11月,在2024廣州車展上,理想汽車公布了全新一代智能駕駛技術(shù)架構(gòu)——端到端+VLM雙系統(tǒng)的最新進(jìn)展。
目前,理想汽車研發(fā)團(tuán)隊(duì)正在加速實(shí)現(xiàn)端到端+VLM系統(tǒng)的“車位到車位”能力升級(jí),正陸續(xù)推送給萬人內(nèi)測(cè)用戶,并將逐步覆蓋理想全國478家門店的試駕車。按照規(guī)劃,到11月底“車位到車位”能力將隨OTA6.5版本車機(jī)系統(tǒng)推送給全量AD Max用戶,升級(jí)后的車輛將支持全國高速收費(fèi)站ETC自主通行,自動(dòng)將導(dǎo)航終點(diǎn)匹配至AVP代客泊車路線。
特斯拉的FSD是一套包含感知、規(guī)控、執(zhí)行在內(nèi)的全鏈路自動(dòng)駕駛軟硬件架構(gòu)。而FSDV12采用的“端到端”的自動(dòng)駕駛系統(tǒng),能夠高度模擬人類駕駛行為,實(shí)現(xiàn)感知決策一體化。近日,特斯拉正式亮相的Robotaxi車型Cybercab,取消了方向盤、踏板和后視鏡,高度依賴于特斯拉的FSD完全自動(dòng)駕駛能力。
“端到端”最鮮明的特點(diǎn)便是基于AI模型對(duì)從傳感器到處理器、執(zhí)行指令等進(jìn)行判斷,不需要人為干預(yù)中間步驟。當(dāng)前各家端到端的技術(shù)路線有所不同,都在積極探索。行業(yè)人士指出,預(yù)計(jì)2025年國內(nèi)自動(dòng)駕駛端到端方案大規(guī)模量產(chǎn)上車。
理想
11月,在2024廣州車展上,理想汽車公布了全新一代智能駕駛技術(shù)架構(gòu)——端到端+VLM雙系統(tǒng)的最新進(jìn)展。
目前,理想汽車研發(fā)團(tuán)隊(duì)正在加速實(shí)現(xiàn)端到端+VLM系統(tǒng)的“車位到車位”能力升級(jí),正陸續(xù)推送給萬人內(nèi)測(cè)用戶,并將逐步覆蓋理想全國478家門店的試駕車。按照規(guī)劃,到11月底“車位到車位”能力將隨OTA6.5版本車機(jī)系統(tǒng)推送給全量AD Max用戶,升級(jí)后的車輛將支持全國高速收費(fèi)站ETC自主通行,自動(dòng)將導(dǎo)航終點(diǎn)匹配至AVP代客泊車路線。
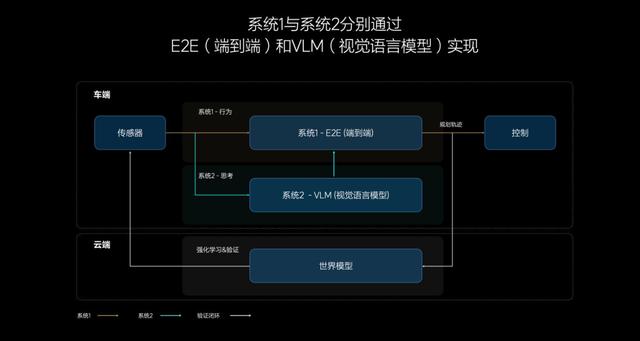
理想汽車提出的端到端+VLM雙系統(tǒng)架構(gòu),采用One Model一體化端到端,是首次將VLM模型部署至車端量產(chǎn)芯片。VLM視覺語言模型是世界上第一個(gè)成功部署在車端芯片的大模型,具備應(yīng)對(duì)復(fù)雜場(chǎng)景的邏輯思考及決策能力。VLM視覺大模型可以幫助智駕能夠更精準(zhǔn)的識(shí)別應(yīng)對(duì)坑洼、減速帶、施工、丁字路口、夜晚無燈、主輔路進(jìn)出等場(chǎng)景,做到提前減速,安全通行。
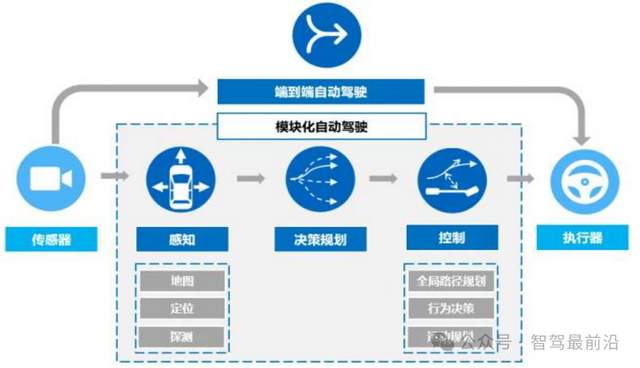
相較于無圖NOA智駕,它具有感知和規(guī)劃兩個(gè)模型,中間還需要其他規(guī)劃介入。而一體化端到端模型之下,信息傳遞不再需要人來設(shè)定規(guī)則,中間無需規(guī)劃,直接傳感器輸入再通過端到端模塊輸出。那么,這樣的智能駕駛效率更高、更擬人更聰明。
商湯
11月27日,在2024“絕影實(shí)力AI DAY”上,面向智能駕駛,商湯絕影構(gòu)建了“車云一體”的產(chǎn)品矩陣,發(fā)布涵蓋高速、城區(qū)以及泊車等全場(chǎng)景的高階智駕、端到端智駕等絕影量產(chǎn)智駕產(chǎn)品體系,同時(shí)全新升級(jí)行業(yè)標(biāo)桿級(jí)別的“開悟”世界模型,以此打造堅(jiān)實(shí)的數(shù)據(jù)基礎(chǔ)設(shè)施。
本屆“絕影實(shí)力AI DAY”上,商湯絕影全面展示了基于J6E、J6M、Orin等不同算力平臺(tái)打造的全場(chǎng)景高階智駕、端到端智駕等絕影量產(chǎn)智駕產(chǎn)品體系。商湯絕影表示,其智駕量產(chǎn)交付也在穩(wěn)步推進(jìn),基于J6平臺(tái)的智駕方案預(yù)計(jì)2025年第二季度將量產(chǎn)交付,而量產(chǎn)端到端智駕方案則預(yù)計(jì)會(huì)在明年年底量產(chǎn)落地。
商湯絕影全棧量產(chǎn)智駕解決方案覆蓋高速領(lǐng)航、城區(qū)領(lǐng)航、泊車輔助等各類場(chǎng)景,滿足全場(chǎng)景智駕需求。2022年底,商湯科技及其聯(lián)合實(shí)驗(yàn)室提出行業(yè)首個(gè)感知決策一體自動(dòng)駕駛通用模型(UniAD),2024年,商湯絕影實(shí)車部署面向量產(chǎn)的真·端到端自動(dòng)駕駛解決方案UniAD。
為了增強(qiáng)端到端自動(dòng)駕駛方案可解釋性和交互能力,依托多模態(tài)大模型強(qiáng)大的常識(shí)理解能力,商湯絕影已研發(fā)出新一代自動(dòng)駕駛大模型DriveAGI,是目前最貼近人類思維模式、最能理解人類意圖并有最強(qiáng)的解決駕駛困難場(chǎng)景能力的下一代自動(dòng)駕駛技術(shù)。
商湯端到端自動(dòng)駕駛解決方案更高的能力上限,綜合理解復(fù)雜交通環(huán)境,泛化能力強(qiáng),靈活度高,駕駛行為更貼近人類習(xí)慣。更快的迭代效率,基于數(shù)據(jù)驅(qū)動(dòng),高效解決行泊場(chǎng)景中感知和決策長(zhǎng)尾問題。更低的系統(tǒng)成本,例如純無圖,無需全量或輕量化高精地圖,僅需導(dǎo)航信息。純視覺,無需雷達(dá)/激光雷達(dá)的信息輸入,僅需攝像頭視覺信息輸入。
為了強(qiáng)化端到端的高端智駕競(jìng)爭(zhēng),商湯絕影全新升級(jí)并發(fā)布了“開悟”世界模型。世界模型最基礎(chǔ)也是最核心的能力是生成高質(zhì)量視頻數(shù)據(jù),高質(zhì)量數(shù)據(jù)的關(guān)鍵在于“真實(shí)”。基于多模態(tài)大模型打造的絕影世界模型,能夠理解真實(shí)世界的物理規(guī)則、交通規(guī)則,生成的視頻數(shù)據(jù)也更加逼真。現(xiàn)場(chǎng)展示的“開悟”生成視頻案例中,晴朗天氣下,汽車、路燈都是有影子的,右轉(zhuǎn)車輛會(huì)主動(dòng)讓行優(yōu)先級(jí)更高的直行車輛。在真實(shí)的基礎(chǔ)上,“開悟”生成的場(chǎng)景視頻,時(shí)間最長(zhǎng)為150秒、分辨率可達(dá)1080P、視角可以實(shí)現(xiàn)11V,是行業(yè)首個(gè)同時(shí)完成上述指標(biāo)的智駕世界模型。
通過多模態(tài)大模型,“開悟”世界模型可以支持多樣化的自動(dòng)駕駛場(chǎng)景及Corner case的可控生成。目前商湯絕影基于1024類場(chǎng)景,能夠泛化出更多的平行世界,打造了千萬級(jí)的生成場(chǎng)景庫,預(yù)計(jì)2025年對(duì)行業(yè)開放。
智已
10月28日,智己汽車正式宣布IM AD 3.0率先完成從“最像人”到“有直覺”的斷代式進(jìn)化,為智駕系統(tǒng)率先注入人工智能生成的“直覺”,正式邁入“直覺”智駕新時(shí)代。依托智己汽車與Momenta聯(lián)合打造的“一段式端到端直覺式智駕大模型”,智己汽車已經(jīng)成為行業(yè)內(nèi)同時(shí)具備L2、L3、L4級(jí)智能駕駛量產(chǎn)能力的品牌。今后,隨著相關(guān)法律法規(guī)逐步出臺(tái),智己用戶將享受行業(yè)領(lǐng)先的自動(dòng)駕駛體驗(yàn)。
IM AD3.0以更接近人腦結(jié)構(gòu)的思考方式,生成本能反應(yīng)主導(dǎo)的直覺決策能力。智己智駕大模型,無需人為定義感知到規(guī)劃接口,可學(xué)習(xí)全局信息、隱含信息。尤其在應(yīng)對(duì)突發(fā)狀況時(shí),能夠“腦補(bǔ)”出看不見、看不全的路況信息,像人類高級(jí)思維一樣可以做出瞬間預(yù)判,既人們通常所說的“直覺”或“下意識(shí)反應(yīng)”;即使在最復(fù)雜的交通環(huán)境中,都做到真正老司機(jī)般“看路開車”的駕駛方式。
“一段式端到端大模型”取消了分模塊智駕結(jié)構(gòu),將感知與規(guī)劃整合進(jìn)一個(gè)大模型,通過數(shù)據(jù)飛輪提供的海量?jī)?yōu)質(zhì)數(shù)據(jù),訓(xùn)練一個(gè)完整的神經(jīng)網(wǎng)絡(luò),分析全局信息、隱含信息,學(xué)習(xí)優(yōu)秀的人類駕駛行為,從原始數(shù)據(jù)輸入到規(guī)劃路徑輸出,形成人腦高級(jí)思維的直覺反應(yīng)。同時(shí),IM AD智駕大模型還有“安全邏輯網(wǎng)絡(luò)”來保證直覺決策的安全性,讓直覺駕駛的行為既高效、又恰當(dāng)、更安全。
據(jù)悉,智己汽車L2+級(jí)高階輔助駕駛,已于10月在全國范圍內(nèi)開通全系車型“無圖城市NOA”,做到“全國都好開、全場(chǎng)景都敢開”。今年6月份,智己入選全國首批“L3準(zhǔn)入及路試聯(lián)合體名單”,預(yù)計(jì)將于2026年正式具備L3級(jí)自動(dòng)駕駛方案的量產(chǎn)條件。L3級(jí)自動(dòng)駕駛也已進(jìn)入量產(chǎn)倒計(jì)時(shí)。智己汽車預(yù)計(jì)將在年內(nèi)獲得首批“L4級(jí)無駕駛?cè)说缆窚y(cè)試牌照”,實(shí)現(xiàn)無人駕駛車率先上路。
小結(jié):
端到端智駕的本質(zhì)是充分利用AI大模型,并結(jié)合軟硬件對(duì)智駕功能體驗(yàn)進(jìn)行的智能化升級(jí)。今年5月,小鵬汽車已實(shí)現(xiàn)端到端大模型量產(chǎn)上車,成為全球唯二實(shí)現(xiàn)端到端大模型落地的車企。小鵬汽車董事長(zhǎng)、CEO何小鵬曾表示,端到端大模型不單單意味著要自研軟件和一些簡(jiǎn)單的硬件,而是自動(dòng)駕駛從云端到車端、從芯片端到電氣端,包括EA架構(gòu)都需要實(shí)現(xiàn)全域自研。也就是說,這對(duì)于車企和相關(guān)供應(yīng)鏈配套廠商的軟硬件能力帶來極大的挑戰(zhàn)。同時(shí),端到端的AI大模型既聰明又有“直覺”,未來進(jìn)一步進(jìn)化,還需要不斷升級(jí)安全能力。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
特斯拉
+關(guān)注
關(guān)注
66文章
6415瀏覽量
131480 -
端到端
+關(guān)注
關(guān)注
0文章
50瀏覽量
10852 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14953瀏覽量
181109
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
解鎖端到端仿真新可能 :全新 aiSim 6 即將發(fā)布
前言隨著端到端自動(dòng)駕駛從學(xué)術(shù)探索走向規(guī)模化應(yīng)用,無論是特斯拉FSD神經(jīng)模擬器、Waymo基于DeepMindGenie3的世界模型,還是國內(nèi)

行業(yè)首個(gè)基于地平線單征程6M芯片的端到端城市NOA方案正式交付上車
2025年1月21日,理想AD Pro 4.0推送,行業(yè)首個(gè)基于地平線單征程6M芯片的端到端城市NOA方案正式交付上車。該方案由理想汽車主導(dǎo)研發(fā),與輕舟智航共同打造,專為城市出行而生,
端到端自動(dòng)駕駛仿真新范式:aiSim如何解決智駕測(cè)試的"災(zāi)難性挑戰(zhàn)"
1 引言:從模塊化到端到端的智駕革命 隨著智能駕駛技術(shù)快速發(fā)展,端

如何訓(xùn)練好自動(dòng)駕駛端到端模型?
[首發(fā)于智駕最前沿微信公眾號(hào)]最近有位小伙伴在后臺(tái)留言提問:端到端算法是怎樣訓(xùn)練的?是模仿學(xué)習(xí)、強(qiáng)化學(xué)習(xí)和離線強(qiáng)化學(xué)習(xí)這三類嗎?其實(shí)端

端到端智駕模擬軟件推薦:為什么aiSim是業(yè)界領(lǐng)先的自動(dòng)駕駛模擬平臺(tái)?
aiSim是全球首個(gè)通過ISO26262 ASIL-D認(rèn)證的自動(dòng)駕駛模擬平臺(tái),提供高保真、全鏈路仿真測(cè)試能力。其核心優(yōu)勢(shì)包括支持端到端智駕閉環(huán)驗(yàn)證、多傳感器融合模擬(20+攝像頭/10
端到端智駕仿真軟件推薦:全球首款A(yù)SIL-D認(rèn)證平臺(tái)助您突破自動(dòng)駕駛測(cè)試瓶頸
隨著L4級(jí)自動(dòng)駕駛商業(yè)化進(jìn)程加速,行業(yè)面臨"16億公里實(shí)測(cè)困境"與"極端場(chǎng)景覆蓋率不足95%"的雙重挑戰(zhàn)。康謀科技推出的aiSim端到端智駕
端到端智駕模擬軟件推薦——為什么選擇Keymotek的aiSim?
隨著自動(dòng)駕駛技術(shù)的快速發(fā)展,車企和科技公司對(duì)于模擬測(cè)試平臺(tái)的需求越來越強(qiáng)。從L2/ADAS到L4/L5等級(jí)的自動(dòng)駕駛,虛擬模擬已經(jīng)成為其中的關(guān)鍵一環(huán)。特別是對(duì)于「端對(duì)
自動(dòng)駕駛中“一段式端到端”和“二段式端到端”有什么區(qū)別?
[首發(fā)于智駕最前沿微信公眾號(hào)]最近有小伙伴提問,一段式端到端和二段式端到

一文讀懂特斯拉自動(dòng)駕駛FSD從輔助到端到端的演進(jìn)
、控制等環(huán)節(jié)各自負(fù)責(zé)不同的功能,各模塊用顯式代碼和規(guī)則來完成任務(wù)。隨著數(shù)據(jù)規(guī)模和算力增長(zhǎng),特斯拉開始把更多功能放到機(jī)器學(xué)習(xí)模型里,尤其是從2024年推出的V12(標(biāo)注為“Supervised”)開始,特斯拉開始大幅度推進(jìn)“端

黑芝麻智能端到端全棧式輔助駕駛系統(tǒng)的應(yīng)用場(chǎng)景
黑芝麻智能推出的全新一代端到端全棧輔助駕駛系統(tǒng),以武當(dāng)C1200系列高算力芯片為基石,深度融合自研感知算法,實(shí)現(xiàn)從場(chǎng)景感知到車輛控制的完全閉環(huán)優(yōu)化——讓輔助駕駛系統(tǒng)學(xué)會(huì)理解路況的呼吸與
蔚來端到端模型化架構(gòu)如何大幅提升安全上限
2024年7月,蔚來將行業(yè)首個(gè)基于端到端模型化架構(gòu)的「自動(dòng)緊急制動(dòng) AEB」推送上車,蔚來也成為了行業(yè)首家使用端
為什么自動(dòng)駕駛端到端大模型有黑盒特性?
[首發(fā)于智駕最前沿微信公眾號(hào)]隨著自動(dòng)駕駛技術(shù)落地,端到端(End-to-End)大模型也成為行業(yè)研究與應(yīng)用的熱門方向。相較于傳統(tǒng)自動(dòng)駕駛系統(tǒng)中的模塊化結(jié)構(gòu),

為何端到端成為各車企智駕布局的首要選擇?
[首發(fā)于智駕最前沿微信公眾號(hào)]在智能駕駛領(lǐng)域,端到端技術(shù)的提出標(biāo)志著自動(dòng)駕駛系統(tǒng)在架構(gòu)設(shè)計(jì)上的一次根本性轉(zhuǎn)變。從傳統(tǒng)的模塊化架構(gòu)將感知、決策、規(guī)劃以及控制等各子系統(tǒng)彼此獨(dú)立分工,
一文帶你厘清自動(dòng)駕駛端到端架構(gòu)差異
[首發(fā)于智駕最前沿微信公眾號(hào)]隨著自動(dòng)駕駛技術(shù)飛速發(fā)展,智能駕駛系統(tǒng)的設(shè)計(jì)思路也經(jīng)歷了從傳統(tǒng)模塊化架構(gòu)到端到端大模型轉(zhuǎn)變。傳統(tǒng)模塊化架構(gòu)將感

自動(dòng)駕駛中基于規(guī)則的決策和端到端大模型有何區(qū)別?
在自動(dòng)駕駛架構(gòu)的選擇上,也經(jīng)歷了從感知、決策控制、執(zhí)行的三段式架構(gòu)到現(xiàn)在火熱的端到端大模型,尤其是在2024年特斯拉推出FSD V12后,各車企




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論