 蔚來端到端模型化架構如何大幅提升安全上限
蔚來端到端模型化架構如何大幅提升安全上限

2024年7月,蔚來將行業首個基于端到端模型化架構的「自動緊急制動 AEB」推送上車,蔚來也成為了行業首家使用端到端模型化架構來做主動安全的車企。
2025年8月,時隔一年,蔚來已經完成了模型化架構驅動下的全向、全速域、全場景智能安全輔助系統,而且同時在成熟的Orin-X平臺與自研的「神璣 NX9031」平臺實現了并行開發。此時,蔚來仍然是行業唯一使用端到端模型化架構來做主動安全的車企。
把端到端用在行車輔助上,這事在今天已經不稀奇。但把端到端用在安全上,一年多來除了蔚來別無分號。
把端到端模型化架構用在安全上究竟有多難?端到端模型化架構究竟能給安全帶來多少提升?端到端安全背后的真正價值到底是什么?
看完今天的文章,或許你就能得到這三個問題的答案,同時也能知道為什么做不好安全,就不可能做好輔助駕駛。
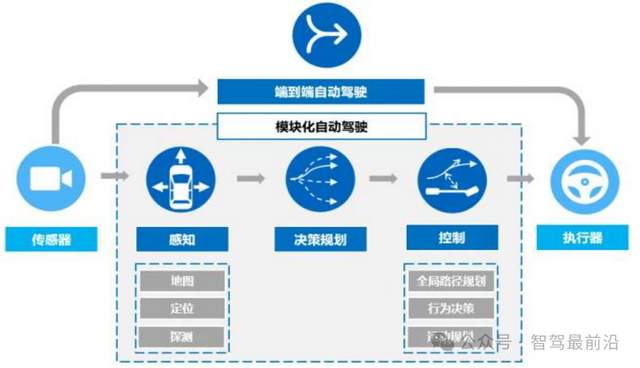
端到端,如何大幅提升安全上限?
如果用最簡單的話來描述端到端模型化架構對安全提升的價值,那就是功能多、性能強、場景豐富、迭代快速,安全的上限會被大幅提升。
傳統手寫規則的主動安全,只能應對有限的場景。如果真實發生的場景不在規則覆蓋的范圍內,就很有可能發生漏觸發或者誤觸發。不管是在你需要緊急制動的時候沒反應,還是在你不需要緊急制動的時候突然猛剎一腳,其實都會影響安全。而且,手寫規則的進化,對人的依賴極強,一次寫入后很難再會有本質的進步。
比如,傳統的「自動緊急制動 AEB」在算法上,會對二輪車的90°橫穿或者0°垂直行駛進行應對。可如果二輪車是斜向殺入,或是從斜后方竄出,甚至是在轉彎過程中,傳統的「自動緊急制動 AEB」還能及時響應嗎?答案是很難。因為手寫規則無法窮舉所有的角度、所有的弧度,面對千變萬化的真實場景,只能選擇保守應對,對不能準確識別的場景不做響應。
而這樣的問題,只能依靠端到端模型化架構來解決。端到端模型化架構,可以通過學習大量人類駕駛員的優秀避險經驗,讓不同場景下制動的時機更加精準,既不會干擾人類駕駛員避險,又能在更多必要的時刻,提供可靠的安全守護。
蔚來率先做到了這件事情。首個量產的端到端AEB,在前向形成了240°環繞的防衛圈,可以處理更多二輪車路口穿行場景,路口性能相比規則時代的AEB提升了5.2倍,對前向障礙物和全角度切入障礙物的事故減損,分別達到了51%和35%。經四大保險公司聯合認定,端到端AEB在2024年減少了25.2%的事故安全損失。
有了這樣的基礎,進入2025年,蔚來模型化架構驅動的智能安全輔助系統持續進化,新增了行業性能最強、覆蓋場景最全的「自動緊急避讓 AES」,以及行業首發應對追尾事故的「追尾碰撞預防及保護 RCM」,并將「通用障礙物預警及輔助 GOA」也進行了模型化的增強,構建了一整套能預警、能剎停、能避開、能防住的全向、全速域、全場景的智慧避險能力。
而且,在行業里還在卷主動安全觸發極速的時候,蔚來已經開始考慮主動安全觸發時的用戶體感,不斷細化主動安全觸發的時機與力度,向更精細的場景迭代優化。根據蔚來內部的數據統計,97.5%的事故發生在速度70km/h以下。做好極速固然重要,但在中低速下確保安全,是更有價值的事情。
那么問題來了,既然端到端模型化架構對安全這么有用,為什么在蔚來做了一年多之后,行業里還是沒有人跟進呢?這其中可能有開發目標與節奏的關系,但一個不可忽視的原因,是必須要具備車端大算力。
沒有算力就沒有數據閉環
更沒有模型化的主動安全
想要實現端到端的模型化架構,就要有海量的高質量數據投入訓練。想要獲得海量高質量的數據,就要在海量的車隊上布置完善的數據篩選與回流閉環。而想要實現這一閉環,就必須要具備車端大算力。
從2022年的ET7開始,蔚來就在車端部署算力達到1,016TOPS的4×Orin-X平臺,其中有一顆Orin負責群體智能,也就是對車端實時產生的全場景數據進行自動篩選與標注,然后回流到云端,供模型進行訓練,然后將更新后的模型參數返回車端,以此形成數據功能閉環。而到了「一顆頂四顆」的「神璣 NX9031」平臺上,也有專門的模塊來負責群體智能。
這就意味著,每一輛擁有群體智能的蔚來車型,都能進行真實路況的數據回流。一輛車每分鐘產生數據達到900T,每周可用于群體智能的數據量達到1億公里。這個數據如果用傳統路測車來跑,需要1,000輛車在三班倒的情況下跑1年。而在蔚來,獲得同等體量、質量還更高的數據,只需要1周。平均每周,蔚來都可以更新一次模型版本。
舉個例子,在蔚來AES功能全量推送前,就已通過群體智能的技術手段在車端全場景下進行了超過3億公里的運行測試。確保嚴格滿足100萬公里誤觸發小于1次且因誤觸發導致碰撞概率1億公里不多于1次的苛刻指標。
而如果沒有這么大的算力,那么在運行常規應用程序的情況下,就很難再額外分出算力去運行數據功能閉環的機制。即使勉強擠出算力,也只能對某個模塊或者某個鏈路進行數據功能閉環,無法實現全場景的數據功能閉環。出于產品、市場、營銷傳播方面的考量,此時大多數車企都會優先選擇把數據功能閉環用在行車上。
但是,蔚來的車上因為具備足夠大的算力,它不需要去做選擇,而是可以將行車、泊車、安全的全場景數據實現回流。因為安全對用戶的價值最大,蔚來先在安全上跑通了數據功能閉環的機制,打好了模型化架構切換的地基。基本功都做扎實之后,蔚來又相繼在安全、行車、泊車方面,全面切換至模型化的架構。
羅馬城不是一天建成的,如果沒有當初沒有堅定地規劃車端大算力和群體智能的技術路線,今天蔚來就不可能實現端到端模型化架構的主動安全。如果主動安全數據功能閉環的地基沒有打好,那么包括后面蔚來世界模型在內更加先進的技術架構,都很難做到順利切換。
所以,蔚來行業首發端到端模型化架構的智能安全輔助系統,既大幅提升了用戶的安全上限,也是蔚來輔助駕駛在技術先進性上的集中體現。
每一點安全提升,都值得全力以赴。這句話在蔚來,從來都不是一句口號,而是落實到所有的技術、工程與產品的開發環節上。
-
模型
+關注
關注
1文章
3789瀏覽量
52208 -
輔助駕駛
+關注
關注
1文章
429瀏覽量
15824 -
蔚來
+關注
關注
1文章
595瀏覽量
15263
原文標題:做不好安全,就不可能做好輔助駕駛
文章出處:【微信號:NIO-Wechat,微信公眾號:蔚來】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛端到端為什么會出現黑盒現象?

端到端下半場,如何做好高保真虛擬數據集的構建與感知?

Nullmax感知規劃端到端大模型進化提速
格靈深瞳靈感實驗室推出端到端開發平臺AI Edge Studio
如何訓練好自動駕駛端到端模型?

端到端智駕模擬軟件推薦——為什么選擇Keymotek的aiSim?
西井科技端到端自動駕駛模型獲得國際認可

端到端發展趨勢下,云算力如何賦能智能駕駛技術躍遷?

為什么自動駕駛端到端大模型有黑盒特性?

為何端到端成為各車企智駕布局的首要選擇?





 工商網監
工商網監
評論