") 軟件算法賦能4D雷達(dá)性能提升
軟件算法賦能4D雷達(dá)性能提升

佐思汽研發(fā)布《2024年軟件定義汽車?yán)走_(dá)行業(yè)研究》報(bào)告。
軟件算法賦能4D雷達(dá)性能提升
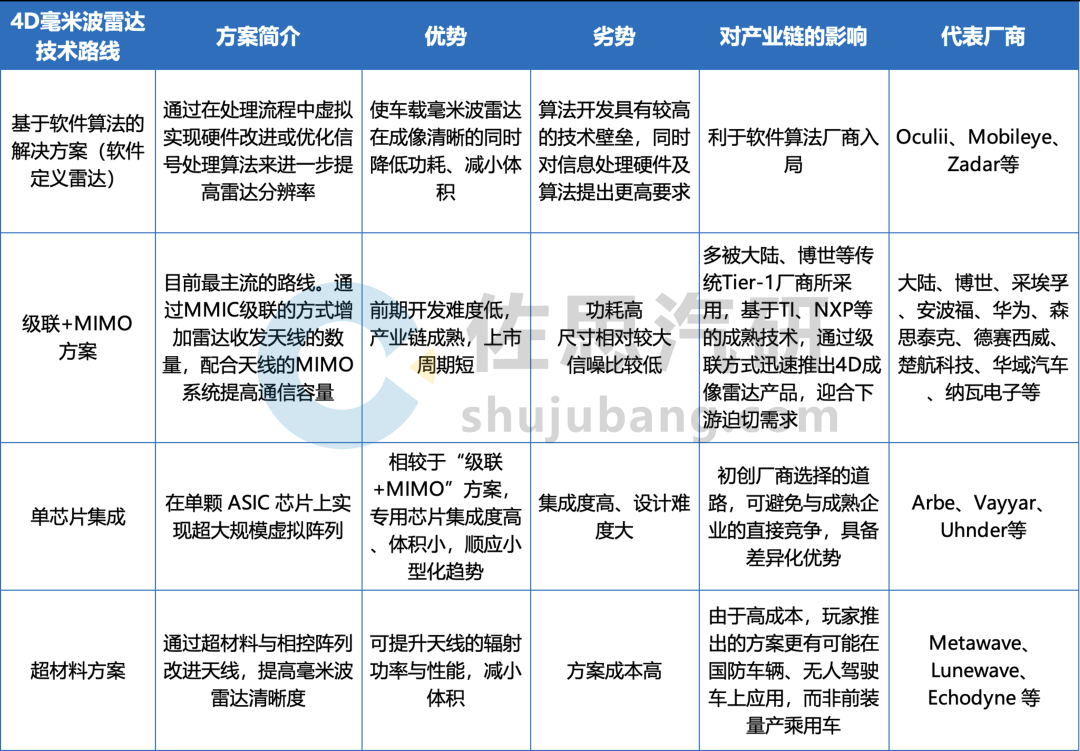
軟件定義雷達(dá)是一種可通過修改或更新軟件來配置和控制雷達(dá)工作方式的雷達(dá)系統(tǒng)。其中,軟件算法不僅作用于處理環(huán)節(jié),更直接作用于MIMO(多輸入多輸出)環(huán)節(jié),虛擬出更多信號(hào)通道。
軟件算法賦能VS硬件提升路線
來源:佐思汽研《2024年軟件定義汽車?yán)走_(dá)行業(yè)研究報(bào)告》
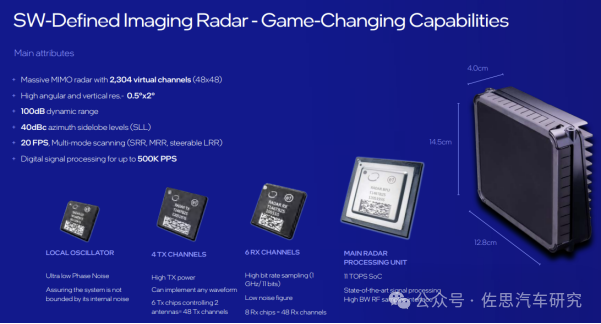
與硬件提升路線相比,軟件定義雷達(dá)可在不進(jìn)行任何物理更改的情況下,用算法來提高雷達(dá)分辨率。比如Mobileye軟件定義成像雷達(dá)可通過軟件來配置,并通過OTA進(jìn)行更新,改變它的接收、發(fā)射和信號(hào)處理等。基于自研SoC+雷達(dá)數(shù)據(jù)算法,Mobileye的成像雷達(dá)可提供約304.8米以內(nèi)細(xì)節(jié)豐富的4D環(huán)境圖像,具備100dB的動(dòng)態(tài)范圍和0.5°x 2°的角分辨率。在生產(chǎn)上,Mobileye已與啟碁科技(WNC)達(dá)成合作,預(yù)計(jì)將于2025年內(nèi)實(shí)現(xiàn)量產(chǎn)。
Mobileye軟件定義雷達(dá)
來源:Mobileye
2023年11月,NXP對(duì)軟件初創(chuàng)公司Zendar Inc.投資并展開合作。利用Zendar分布式孔徑雷達(dá)技術(shù)(DAR),開發(fā)面向汽車應(yīng)用的高分辨率雷達(dá)系統(tǒng)。該DAR技術(shù)通過將車輛上多個(gè)雷達(dá)傳感器的信息進(jìn)行相干融合,創(chuàng)建一個(gè)更大的有效天線孔徑,從而實(shí)現(xiàn)低于0.5度角度分辨率的高分辨率成像。這一性能可用于精確繪制環(huán)境地圖,是自動(dòng)駕駛系統(tǒng)的關(guān)鍵。
Zendar分布式孔徑雷達(dá)技術(shù)(DAR)提供比傳統(tǒng)雷達(dá)系統(tǒng)高20倍的性能

來源:Zendar
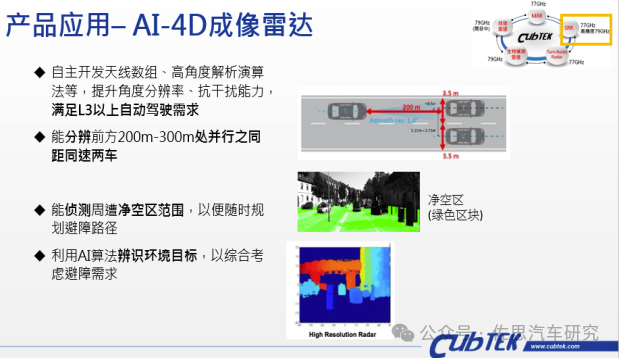
2022年1月,為升科與NXP聯(lián)手發(fā)布最新一代4D成像雷達(dá)方案,滿足L3級(jí)以上自動(dòng)駕駛感知需求。采用為升科的信號(hào)處理算法,不僅實(shí)現(xiàn)小于1度的角度分辨率,實(shí)現(xiàn)300米測距,20FPS數(shù)據(jù)速率輸出,每秒可生成8萬個(gè)點(diǎn)云。針對(duì)海量數(shù)據(jù)的處理,為升科也在利用AI技術(shù)實(shí)現(xiàn)目標(biāo)分類。
為升科(CubTEK)與NXP合作開發(fā)的4D成像雷達(dá)
來源:為升科(CubTEK)
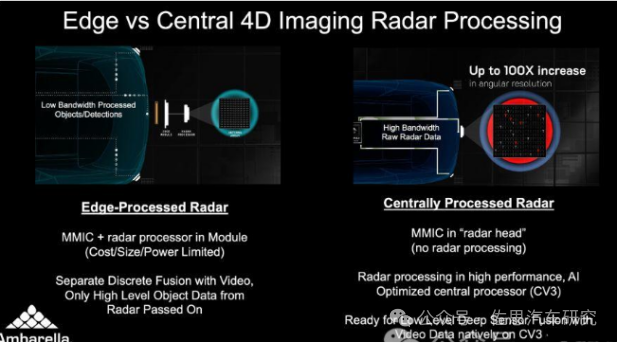
雷達(dá)原始數(shù)據(jù)向集中式處理發(fā)展,借助MIPI A-PHY解鎖高速率傳輸
在集中式處理方法下,由于所有傳感器的原始數(shù)據(jù)都在一個(gè)中心點(diǎn)進(jìn)行合并,數(shù)據(jù)進(jìn)行融合時(shí)不會(huì)丟失關(guān)鍵信息。由于不在前端進(jìn)行處理,毫米波雷達(dá)傳感器模塊大大簡化,從而縮小尺寸,降低功耗和成本。
雷達(dá)原始數(shù)據(jù)集中化處理的優(yōu)勢

來源:Valens
比如,安霸于2022年12月發(fā)布中央域控4D成像毫米波雷達(dá)架構(gòu)。不僅可以集中處理原始毫米波雷達(dá)數(shù)據(jù),也可與其它傳感器輸入,例如攝像頭、激光雷達(dá)和超聲波,進(jìn)行深入的底層融合。采用傲酷 AI算法創(chuàng)建虛擬天線陣列,使得MMIC(單片微波集成電路)的數(shù)量大幅減少,同時(shí)實(shí)現(xiàn)了極高的0.5度方位角和俯仰角分辨率,且在前端無需接雷達(dá)處理器。由于不需要邊緣端的雷達(dá)處理,避免了信息過濾和傳感器信息損失。
安霸中央域控4D成像毫米波雷達(dá)
來源:安霸
在朝向上述集中式架構(gòu)過渡時(shí),需要在整個(gè)車輛中實(shí)現(xiàn)高速鏈路:該架構(gòu)依賴于車輛的以太網(wǎng)骨干網(wǎng)。但一些制造商也在推動(dòng)MIPI A-PHY作為以太網(wǎng)替代方案。
例如Valens于2023年9月聯(lián)合韓國Smart Radar System(SRS)公司展示了利用MIPI A-PHY技術(shù)實(shí)現(xiàn)集中化處理的案例。
MIPI A-PHY是一種標(biāo)準(zhǔn)化的高速傳輸技術(shù),具備高帶寬、低延遲和可靠性等特點(diǎn)。Valens憑借符合A-PHY標(biāo)準(zhǔn)的芯片組VA7000,提供高速、可靠和安全的數(shù)據(jù)傳輸解決方案。例如,在處理高帶寬原始數(shù)據(jù)和傳輸高速數(shù)據(jù)時(shí),快速SPI作為一種外設(shè)設(shè)備通信的接口技術(shù),能夠?qū)崿F(xiàn)動(dòng)態(tài)調(diào)制信號(hào)和快速啟動(dòng),為數(shù)據(jù)傳輸提供高效保障。
通過將MIPI A-PHY技術(shù)融入其雷達(dá)系統(tǒng)中,Valens使12部MMIC雷達(dá)的原始數(shù)據(jù)能夠高效傳輸?shù)街醒胩幚韱卧M(jìn)行分析和處理。這些經(jīng)過分析和處理的數(shù)據(jù)適用于汽車安全系統(tǒng)或自動(dòng)駕駛等應(yīng)用,例如目標(biāo)檢測、跟蹤和決策。
Valens利用MIPI A-PHY技術(shù)實(shí)現(xiàn)雷達(dá)原始數(shù)據(jù)集中處理

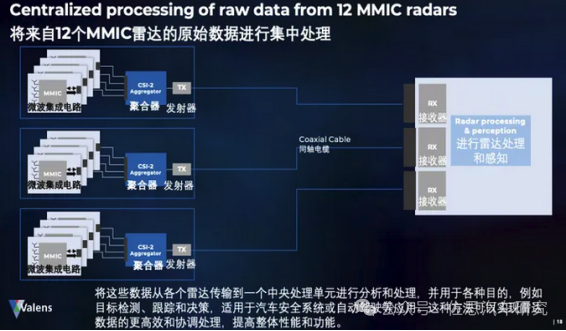
來源:Valens
除Smart Radar System公司外,Intron旗下的一家中國公司G-Pulse也在基于A-PHY,利用Valens的VA7000芯片組系列,創(chuàng)建一種具有集中處理功能的4D毫米波雷達(dá)。這種軟件定義的雷達(dá)能通過UTP線纜運(yùn)行,可實(shí)現(xiàn)低成本和低能耗。
審核編輯:劉清
-
信號(hào)處理
+關(guān)注
關(guān)注
49文章
1143瀏覽量
105100 -
MIMO
+關(guān)注
關(guān)注
12文章
609瀏覽量
79558 -
OTA
+關(guān)注
關(guān)注
7文章
628瀏覽量
38286 -
軟件算法
+關(guān)注
關(guān)注
1文章
6瀏覽量
6929 -
雷達(dá)傳感器
+關(guān)注
關(guān)注
3文章
309瀏覽量
35323
原文標(biāo)題:軟件定義雷達(dá)研究:軟件算法和集中式處理如何提高雷達(dá)整體性能
文章出處:【微信號(hào):zuosiqiche,微信公眾號(hào):佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
德賽西威發(fā)布首款支持衛(wèi)星架構(gòu)的8T8R 4D毫米波雷達(dá)
4D毫米波雷達(dá)為什么稱為激光雷達(dá)的“替身”?
使用單芯片 8 x 8 級(jí)聯(lián)收發(fā)器實(shí)現(xiàn) 4D 雷達(dá)成像
全球體積最小4D FMCW激光雷達(dá)亮相!

CTLRR-540毫米波雷達(dá)4D成像應(yīng)用測試(一)

自動(dòng)駕駛中4D毫米波雷達(dá)在雨霧中更具優(yōu)勢嗎?

單芯片8T8R,全國產(chǎn)“4D衛(wèi)星架構(gòu)雷達(dá)”來了
洛微科技攜4D FMCW激光雷達(dá)與3D感知方案閃耀光博會(huì),引領(lǐng)行業(yè)新趨勢

4D毫米波雷達(dá)比3D毫米波雷達(dá)到底強(qiáng)在哪兒?

恩智浦4D成像雷達(dá)如何助力自動(dòng)駕駛發(fā)展
生成式 AI 重塑自動(dòng)駕駛仿真:4D 場景生成技術(shù)的突破與實(shí)踐

Litestar 4D:運(yùn)動(dòng)場所照明
LITESTAR 4D應(yīng)用:運(yùn)動(dòng)場照明設(shè)計(jì)流程
黑芝麻智能視覺與4D毫米波雷達(dá)前融合算法介紹




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論