 【先楫半導體HPM6750EVKMINI評估板試用體驗】基準性能測試之三:whetstone
【先楫半導體HPM6750EVKMINI評估板試用體驗】基準性能測試之三:whetstone

本文來源電子發燒友社區,作者:李先生, 帖子地址:https://bbs.elecfans.com/jishu_2284399_1_1.html
前言
獲取代碼
添加代碼
修改代碼
測試
對比
復制代碼
前言
之前我們使用dhrystone和coremark進行了相關的性能測試。這次我們使用whetstone進行測試,該測試關注浮點相關的計算性能。
獲取代碼
http://www.roylongbottom.org.uk/classic_benchmarks.tar.gz
下下載classic_benchmarks.tar.gz文件
解壓文件
將classic_benchmarksclassic_benchmarkssource_codewhetstone復制到工程目錄
projled下
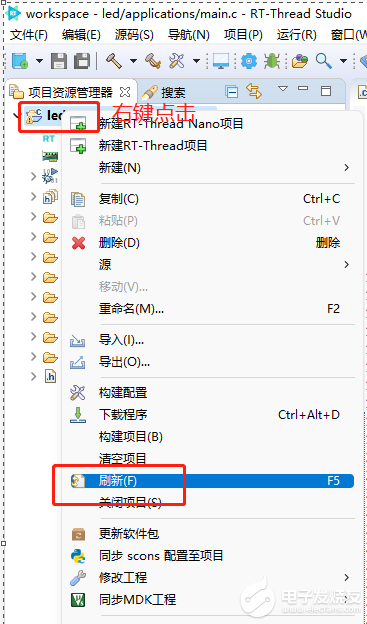
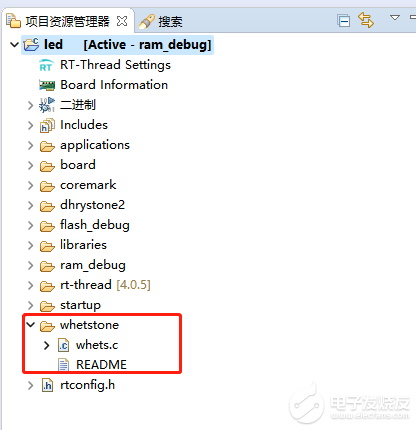
按照上一步將文件復制到工程目錄下后,按照如下方式刷新
可以看到源碼添加到了工程目錄
修改代碼
前面注釋**************************************************************************少了/
注釋掉#include"cpuidh.h"
注釋掉getDetails
刪除whets.txt相關操作
fprintf改為rt_kprintf
Main改為whetstone_main
pout調用時字符串中刪除
浮點數都放大100倍整數打印
詳見后面附錄代碼
在main中調用
intcore_main(intargc,char*argv[]);
whetstone_main(0, 0);
注以下結果放大100倍,整數打印
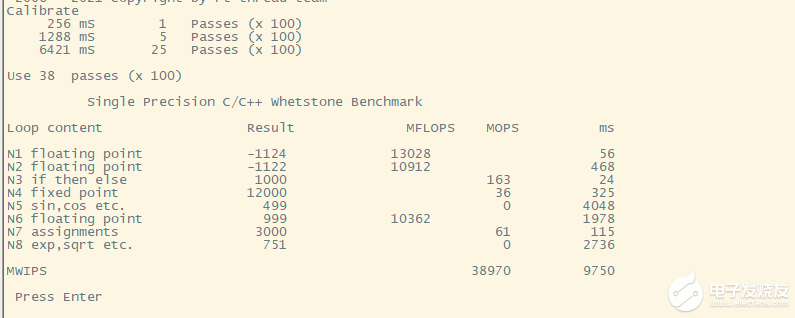
-O0
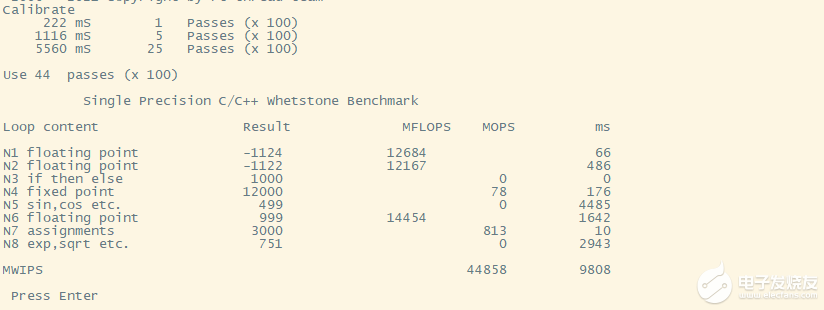
-O3
|
RT_tiCK_PER_SECOND=1000
|
||||
|
優化等級0
|
優化等級3
|
|||
|
RAM中運行
|
MWIPS
|
38.970
|
44.858
|
|
|
ROM中運行
|
||||
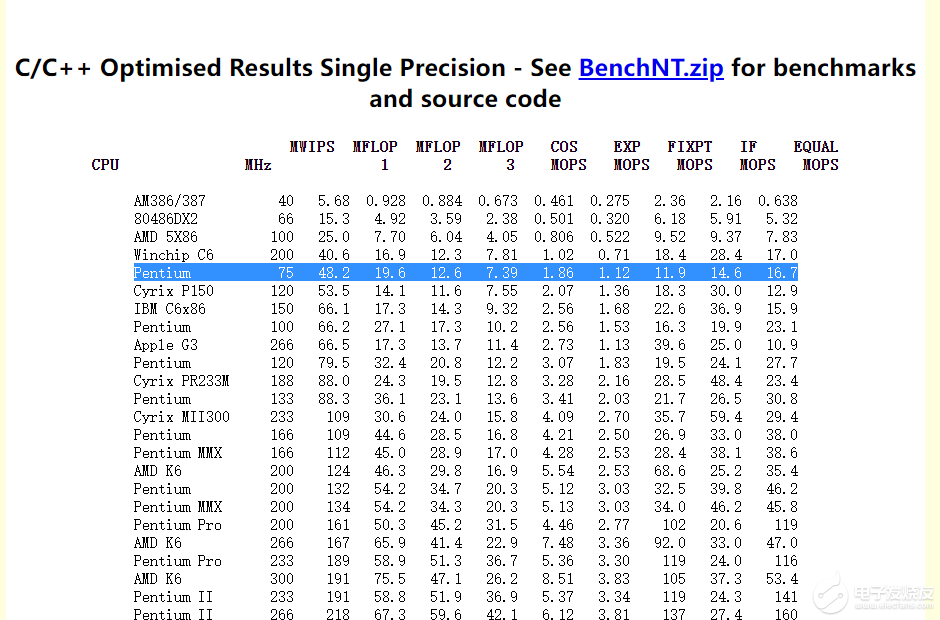
對比
可以從下網站看看打敗了全國多少網友
http://www.roylongbottom.org.uk/whetstone%20results.htm
附whets.c代碼
- /*gcc whets.c cpuidc64.o cpuida64.o -m64 -lrt -lc -lm -o whet
- *
- *Document: Whets.c
- *File Group: Classic Benchmarks
- *Creation Date: 6 November 1996
- *Revision Date: 6 November 2010 Ubuntu Version for PCs
- *
- *Title: Whetstone Benchmark in C/C++
- *Keywords: WHETSTONE BENCHMARK PERFORMANCE MIPS
- * MWIPS MFLOPS
- *
- *Abstract: C or C++ version of Whetstone one of the
- * Classic Numeric Benchmarks with example
- * results on P3 to P6 based PCs.
- *
- *Contributor: roy@roylongbottom.org.uk
- *
- ************************************************************
- *
- * C/C++ Whetstone Benchmark Single or Double Precision
- *
- * Original concept Brian Wichmann NPL 1960's
- * Original author Harold CurnowCCTA 1972
- * Self timing versions Roy Longbottom CCTA 1978/87
- * Optimisation control Bangor University 1987/90
- * C/C++ Version Roy Longbottom 1996
- * Compatibility & timersAl Aburto 1996
- *
- ************************************************************
- *
- * Official version approved by:
- *
- * Harold Curnow100421.1615@compuserve.com
- *
- * Happy 25th birthday Whetstone, 21 November 1997
- *
- ************************************************************
- *
- * The program normally runs for about 100 seconds
- * (adjustable in main - variable duration). This time
- * is necessary because of poor PC clock resolution.
- * The original concept included such things as a given
- * number of subroutine calls and divides which may be
- * changed by optimisation. For comparison purposes the
- * compiler and level of optimisation should be identified.
- *
- * This version is set to run for 10 seconds using high
- * resolution timer.
- *
- ************************************************************
- *
- * The original benchmark had a single variable I which
- * controlled the running time. Constants with values up
- * to 899 were multiplied by I to control the number
- * passes for each loop. It was found that large values
- * of I could overflow index registers so an extra outer
- * loop with a second variable J was added.
- *
- * Self timing versions were produced during the early
- * days. The 1978 changes supplied timings of individual
- * loops and these were used later to produce MFLOPS and
- * MOPS ratings.
- *
- * 1987 changes converted the benchmark to Fortran 77
- * standards and removed redundant IF statements and
- * loops to leave the 8 active loops N1 to N8. Procedure
- * P3 was changed to use global variables to avoid over-
- * optimisation with the first two statements changed from
- * X1=X and Y1=Y to X=Y and Y=Z. A self time calibrating
- * version for PCs was also produced, the facility being
- * incorporated in this version.
- *
- * This version has changes to avoid worse than expected
- * speed ratings, due to underflow, and facilities to show
- * that consistent numeric output is produced with varying
- * optimisation levels or versions in different languages.
- *
- * Some of the procedures produce ever decreasing numbers.
- * To avoid problems, variables T and T1 have been changed
- * from 0.499975 and 0.50025 to 0.49999975 and 0.50000025.
- *
- * Each section now has its own double loop. Inner loops
- * are run 100 times the loop constants. Calibration
- * determines the number of outer loop passes. The
- * numeric results produced in the main output are for
- * one pass on the outer loop. As underflow problems were
- * still likely on a processor 100 times faster than a 100
- * MHz Pentium, three sections have T=1.0-T inserted in the
- * outer loop to avoid the problem. The two loops avoid
- * index register overflows.
- *
- * The first section is run ten times longer than required
- * for accuracy in calculating MFLOPS. This time is divided
- * by ten for inclusion in the MWIPS calculations.
- *
- * Early version has facilities for typing in details of
- * the particular run, appended to file whets.txt along
- * with the results. This version attemps to obtain these
- * automatically.
- *
- * 2010 Section 4 modified slightly to avoid over optimisation
- * by GCC compiler
- *
- * Roy Longbottomroy@roylongbottom.org.uk
- *
- ************************************************************
- *
- * Whetstone benchmark results, further details of the
- * benchmarks and history are available from:
- *
- * http://www.roylongbottom.org.uk/whetstone%20results.htm
- * http://www.roylongbottom.org.uk/whetstone.htm
- *
- ************************************************************
- *
- * Source code is available in C/C++, Fortran, Basic and
- * Visual Basic in the same format as this version. Pre-
- * compiled versions for PCs are also available via C++.
- * These comprise optimised and non-optimised versions
- * for DOS, Windows and NT. See:
- *
- * http://www.roylongbottom.org.uk/whetstone%20results.htm
- *
- ************************************************************
- *
- * Example of initial calibration display (Pentium 100 MHz)
- *
- * Single Precision C/C++ Whetstone Benchmark
- *
- * Calibrate
- * 0.17 Seconds 1 Passes (x 100)
- * 0.77 Seconds 5 Passes (x 100)
- * 3.70 Seconds 25 Passes (x 100)
- *
- * Use 676passes (x 100)
- *
- * 676 passes are used for an approximate duration of 100
- * seconds, providing an initial estimate of a speed rating
- * of 67.6 MWIPS.
- *
- * This is followed by the table of results as below.
- * Whetstone SinglePrecision Benchmark in C/C++
- *
- * Loop content Result MFLOPS MOPS Seconds
- *
- * N1 floating point -1.12475025653839100 19.971 0.274
- * N2 floating point -1.12274754047393800 11.822 3.240
- * N3 if then else 1.00000000000000000 11.659 2.530
- * N4 fixed point 12.00000000000000000 13.962 6.430
- * N5 sin,cos etc. 0.49904659390449520 2.097 11.310
- * N6 floating point 0.99999988079071040 3.360 45.750
- * N7 assignments 3.00000000000000000 2.415 21.810
- * N8 exp,sqrt etc. 0.75110864639282230 1.206 8.790
- *
- * MWIPS 28.462 100.134
- *
- *Note different numeric results to single precision. Slight variations
- *are normal with different compilers and sometimes optimisation levels.
- *
- **************************************************************************/
- #include /* for sin, exp etc. */
- #include /* standard I/O */
- #include /* for strcpy - 3 occurrences*/
- #include /* for exit - 1 occurrence */
- //#include "cpuidh.h"
- /*PRECISION PRECISION PRECISION PRECISION PRECISION PRECISION PRECISION*/
- /* #define DP */
- #ifdef DP
- #define SPDP double
- #define Precision "Double"
- #else
- #define SPDP float
- #define Precision "Single"
- #endif
- //#define opt "Opt 3 64 Bit"
- void whetstones(long xtra, long x100, int calibrate);
- void pa(SPDP e[4], SPDP t, SPDP t2);
- void po(SPDP e1[4], long j, long k, long l);
- void p3(SPDP *x, SPDP *y, SPDP *z, SPDP t, SPDP t1, SPDP t2);
- void pout(char* title, float ops, int type, SPDP checknum,
- SPDP time, int calibrate, int section);
- static SPDP loop_time[9];
- static SPDP loop_mops[9];
- static SPDP loop_mflops[9];
- static SPDP TimeUsed;
- static SPDP mwips;
- static char headings[9][18];
- static SPDP Check;
- static SPDP results[9];
- #include "rtthread.h"
- doubletheseSecs = 0.0;
- doublestartSecs = 0.0;
- doublesecs;
- int millisecs = 0;
- void start_time()
- {
- startSecs = rt_tick_get()*1.0/RT_TICK_PER_SECOND;
- return;
- }
- void end_time()
- {
- secs = rt_tick_get()*1.0/RT_TICK_PER_SECOND - startSecs;
- millisecs = (int)(1000.0 * secs);
- return;
- }
- int whetstone_main(int argc, char *argv[])
- {
- int count = 10, calibrate = 1;
- long xtra = 1;
- int section;
- long x100 = 100;
- int duration = 10;
- ///FILE *outfile;
- char compiler[80], options[256], general[10][80] = {" "};
- char endit[80];
- int i;
- int nopause = 1;
- if (argc > 1)
- {
- switch (argv[1][0])
- {
- case 'N':
- nopause = 0;
- break;
- case 'n':
- nopause = 0;
- break;
- }
- }
- //getDetails();
- //for (i=1; i<10; i++)
- //{
- // rt_kprintf("%sn", configdata[i]);
- //}
- ///local_time();
- ///rt_kprintf("n");
- ///rt_kprintf("##########################################n");
- ///rt_kprintf("%s Precision C Whetstone Benchmark %s, %sn", Precision, opt, timeday);
- ///outfile = fopen("whets.txt","a+");
- ///if (outfile == NULL)
- ///{
- /// rt_kprintf ("Cannot open results file nn");
- /// rt_kprintf("Press Enter to exitn");
- /// i = getchar();
- ///
- /// exit (0);
- ///}
- rt_kprintf("Calibraten");
- do
- {
- TimeUsed=0;
- whetstones(xtra,x100,calibrate);
- rt_kprintf("%8d mS %8d Passes (x 100)n",(int)(TimeUsed*1000),xtra);
- calibrate++;
- count--;
- if (TimeUsed > 2.0)
- {
- count = 0;
- }
- else
- {
- xtra = xtra * 5;
- }
- }
- while (count > 0);
- if (TimeUsed > 0) xtra = (long)((SPDP)(duration * xtra) / TimeUsed);
- if (xtra < 1) xtra = 1;
- calibrate = 0;
- rt_kprintf("nUse %dpasses (x 100)n", (int)xtra);
- rt_kprintf("n %s Precision C/C++ Whetstone Benchmark",Precision);
- #ifdef PRECOMP
- rt_kprintf("n Compiler%s", precompiler);
- rt_kprintf("n Options %sn", preoptions);
- #else
- rt_kprintf("n");
- #endif
- rt_kprintf("nLoop content Result MFLOPS "
- " MOPS msnn");
- TimeUsed=0;
- whetstones(xtra,x100,calibrate);
- rt_kprintf("nMWIPS ");
- if (TimeUsed>0)
- {
- mwips=(float)(xtra) * (float)(x100) / (10 * TimeUsed);
- }
- else
- {
- mwips = 0;
- }
- rt_kprintf(" %13d%13dnn",(int)(mwips*1000),(int)(TimeUsed*1000));
- if (Check == 0) rt_kprintf("Wrong answer");
- /************************************************************************/
- /* Add results to output file whets.txt */
- /************************************************************************/
- ///rt_kprintf( "n");
- ///rt_kprintf( "##############################################nn");
- ///for (i=1; i<10; i++)
- ///{
- /// frt_kprintf(outfile, "%s n", configdata[i]);
- ///}
- ///rt_kprintf( "n");
- ///rt_kprintf( "##############################################nn");
- ///rt_kprintf( "Whetstone %s Precision C Benchmark%s, %sn",Precision, opt, timeday);
- ///rt_kprintf( "n");
- //rt_kprintf("Loop content Result"
- // " MFLOPS MOPS Secondsnn");
- //for (section=1; section<9; section++)
- // {
- // rt_kprintf( "%s%24.17f ", headings[section],
- // results[section]);
- // if (loop_mops[section] == 99999)
- // {
- // rt_kprintf("%9.3f %9.3fn",
- // loop_mflops[section], loop_time[section]);
- // }
- // else
- // {
- // rt_kprintf( " %9.3f %9.3fn",
- // loop_mops[section], loop_time[section], results[section]);
- // }
- //}
- //fflush(outfile);
- //rt_kprintf( "nMWIPS ");
- //rt_kprintf( "%9.3f%9.3fnn",mwips,TimeUsed);
- // rt_kprintf( "Resultstoloadtospreadsheet ");
- // rt_kprintf( " MWIPS Mflops1 Mflops2 Mflops3 Cosmops"
- // " ExpmopsFixpmops Ifmops Eqmopsn");
- //rt_kprintf( "Resultstoloadtospreadsheet ");
- // rt_kprintf( " %9.3f %9.3f %9.3f", mwips, loop_mflops[1],
- // loop_mflops[2]);
- // rt_kprintf( " %9.3f %9.3f %9.3f", loop_mflops[6],
- // loop_mops[5], loop_mops[8]);
- //rt_kprintf( " %9.3f %9.3f %9.3fnn", loop_mops[4],
- // loop_mops[3], loop_mops[7]);
- ///fflush(outfile);
- ///fclose (outfile);
- ///rt_kprintf ("n");
- ///rt_kprintf ("A new results file, whets.txt,will have been created in the samen");
- ///rt_kprintf ("directory as the .EXE files, if one did not already exist.nn");
- if (nopause)
- {
- rt_kprintf(" Press Enternn");
- i = getchar();
- }
- return 0;
- }
- void whetstones(long xtra, long x100, int calibrate)
- {
- long n1,n2,n3,n4,n5,n6,n7,n8,i,ix,n1mult;
- SPDP x,y,z;
- long j,k,l;
- SPDP e1[4];
- SPDP t =0.49999975;
- SPDP t0 = t;
- SPDP t1 = 0.50000025;
- SPDP t2 = 2.0;
- Check=0.0;
- n1 = 12*x100;
- n2 = 14*x100;
- n3 = 345*x100;
- n4 = 210*x100;
- n5 = 32*x100;
- n6 = 899*x100;
- n7 = 616*x100;
- n8 = 93*x100;
- n1mult = 10;
- /* Section 1, Array elements */
- e1[0] = 1.0;
- e1[1] = -1.0;
- e1[2] = -1.0;
- e1[3] = -1.0;
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=0; i*n1mult;>
- {
- e1[0] = (e1[0] + e1[1] + e1[2] - e1[3]) * t;
- e1[1] = (e1[0] + e1[1] - e1[2] + e1[3]) * t;
- e1[2] = (e1[0] - e1[1] + e1[2] + e1[3]) * t;
- e1[3] = (-e1[0] + e1[1] + e1[2] + e1[3]) * t;
- }
- t = 1.0 - t;
- }
- t =t0;
- }
- end_time();
- secs = secs/(SPDP)(n1mult);
- pout("N1 floating point",(float)(n1*16)*(float)(xtra),
- 1,e1[3],secs,calibrate,1);
- /* Section 2, Array as parameter */
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=0; i;>
- {
- pa(e1,t,t2);
- }
- t = 1.0 - t;
- }
- t =t0;
- }
- end_time();
- pout("N2 floating point",(float)(n2*96)*(float)(xtra),
- 1,e1[3],secs,calibrate,2);
- /* Section 3, Conditional jumps */
- j = 1;
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=0; i;>
- {
- if(j==1) j = 2;
- else j = 3;
- if(j>2) j = 0;
- else j = 1;
- if(j<1)? ?? ???j = 1;
- else j = 0;
- }
- }
- }
- end_time();
- pout("N3 if then else",(float)(n3*3)*(float)(xtra),
- 2,(SPDP)(j),secs,calibrate,3);
- /* Section 4, Integer arithmetic */
- j = 1;
- k = 2;
- l = 3;
- e1[0] = 0.0;
- e1[1] = 0.0;
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=0; i;>
- {
- j = j *(k-j)*(l-k);
- k = l * k - (l-j) * k;
- l = (l-k) * (k+j);
- e1[l-2] = e1[l-2] + j + k + l;
- e1[k-2] = e1[k-2] + j * k * l;
- //was e1[l-2] = j + k + l; ande1[k-2] = j * k * l;
- }
- }
- }
- end_time();
- x = (e1[0]+e1[1])/(SPDP)n4/(SPDP)xtra; // was x = e1[0]+e1[1];
- pout("N4 fixed point ",(float)(n4*15)*(float)(xtra),
- 2,x,secs,calibrate,4);
- /* Section 5, Trig functions */
- x = 0.5;
- y = 0.5;
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=1; i;>
- {
- x = t*atan(t2*sin(x)*cos(x)/(cos(x+y)+cos(x-y)-1.0));
- y = t*atan(t2*sin(y)*cos(y)/(cos(x+y)+cos(x-y)-1.0));
- }
- t = 1.0 - t;
- }
- t = t0;
- }
- end_time();
- pout("N5 sin,cos etc.",(float)(n5*26)*(float)(xtra),
- 2,y,secs,calibrate,5);
- /* Section 6, Procedure calls */
- x = 1.0;
- y = 1.0;
- z = 1.0;
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=0; i;>
- {
- p3(&x,&y,&z,t,t1,t2);
- }
- }
- }
- end_time();
- pout("N6 floating point",(float)(n6*6)*(float)(xtra),
- 1,z,secs,calibrate,6);
- /* Section 7, Array refrences */
- j = 0;
- k = 1;
- l = 2;
- e1[0] = 1.0;
- e1[1] = 2.0;
- e1[2] = 3.0;
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=0;i;i++)
- {
- po(e1,j,k,l);
- }
- }
- }
- end_time();
- pout("N7 assignments ",(float)(n7*3)*(float)(xtra),
- 2,e1[2],secs,calibrate,7);
- /* Section 8, Standard functions */
- x = 0.75;
- start_time();
- {
- for (ix=0; ix;>
- {
- for(i=0; i;>
- {
- x = sqrt(exp(log(x)/t1));
- }
- }
- }
- end_time();
- pout("N8 exp,sqrt etc. ",(float)(n8*4)*(float)(xtra),
- 2,x,secs,calibrate,8);
- return;
- }
- void pa(SPDP e[4], SPDP t, SPDP t2)
- {
- long j;
- for(j=0;j<6;j++)
- {
- e[0] = (e[0]+e[1]+e[2]-e[3])*t;
- e[1] = (e[0]+e[1]-e[2]+e[3])*t;
- e[2] = (e[0]-e[1]+e[2]+e[3])*t;
- e[3] = (-e[0]+e[1]+e[2]+e[3])/t2;
- }
- return;
- }
- void po(SPDP e1[4], long j, long k, long l)
- {
- e1[j] = e1[k];
- e1[k] = e1[l];
- e1[l] = e1[j];
- return;
- }
- void p3(SPDP *x, SPDP *y, SPDP *z, SPDP t, SPDP t1, SPDP t2)
- {
- *x = *y;
- *y = *z;
- *x = t * (*x + *y);
- *y = t1 * (*x + *y);
- *z = (*x + *y)/t2;
- return;
- }
- void pout(char* title, float ops, int type, SPDP checknum,
- SPDP time, int calibrate, int section)
- {
- SPDP mops,mflops;
- Check = Check + checknum;
- loop_time[section] = time;
- strcpy (headings[section],title);
- TimeUsed =TimeUsed + time;
- if (calibrate == 1)
- {
- results[section] = checknum;
- }
- if (calibrate == 0)
- {
- rt_kprintf("%s %13d ",headings[section],(int)(results[section]*1000));
- if (type == 1)
- {
- if (time>0)
- {
- mflops = ops/(1000000L*time);
- }
- else
- {
- mflops = 0;
- }
- loop_mops[section] = 99999;
- loop_mflops[section] = mflops;
- rt_kprintf(" %13d %13dn",
- (int)(loop_mflops[section]*1000), (int)(loop_time[section]*1000));
- }
- else
- {
- if (time>0)
- {
- mops = ops/(1000000L*time);
- }
- else
- {
- mops = 0;
- }
- loop_mops[section] = mops;
- loop_mflops[section] = 0;
- rt_kprintf(" %13d%13dn",
- (int)(loop_mops[section]), (int)(loop_time[section]*1000));
- }
- }
- return;
- }
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
mcu
+關注
關注
147文章
18925瀏覽量
398232 -
先楫半導體
+關注
關注
12文章
285瀏覽量
3302
發布評論請先 登錄
相關推薦
熱點推薦
【媒體視角】“五高一低” 筑核心,先楫半導體助力具身智能行業新突破
及嵌入式解決方案核心提供商,上海先楫半導體科技有限公司(先楫半導體、HPMicro)緊跟產業浪潮

CES2026:先楫半導體隆重推出HPM5E3Y,打造機器人運動控制芯片陣容
新紀元。作為高性能微控制器產品及嵌入式解決方案提供商,上海先楫半導體科技有限公司 (先楫

先楫半導體榮膺“年度優秀AI機器人創新產品獎” | “芯”動力賦能產業升級
2025年11月6日深圳,在業內知名媒體電子發燒友網主辦的第十三屆電機控制先進技術論壇上,上海先楫半導體科技有限公司(先楫

元禾控股投資先楫半導體:國產高性能MCU駛入機器人控制“快車道”
RISC-V高性能芯片賽道。此次融資不僅是對先楫半導體企業技術實力的認可,更標志著我們開啟在機器人控制領域從“蓄勢待發”到逼近爆發臨界點的新篇章。隨著全球智能機器人產
先楫半導體高性能MCU入駐立創商城,國產芯勢力再添新動能
先楫半導體(HPMicro)宣布其全系列高性能MCU芯片正式上架立創商城(LCSC),標志著國產高端MCU在供應鏈渠道與生態服務方面邁上新臺階,國產芯勢力再添新動能。
先楫半導體HPM6E8Y:先楫實時控制芯片驅動的機器人關節“芯”時代
及產品總監費振東帶來了一款實時控制芯片驅動——HPM6E8Y。 ? ? 據費振東介紹,先楫半導體HPM6E8Y系列高
發表于 05-13 11:50
?1797次閱讀

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖
2025年5月6日 上海 |高性能微控制器及嵌入式解決方案提供商“上海先楫半導體科技有限公司”(先楫
發表于 05-07 14:07
?1133次閱讀

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖
2025年5月6日上海|高性能微控制器及嵌入式解決方案提供商“上海先楫半導體科技有限公司”(先楫
重磅更新 | 先楫半導體HPM_SDK v1.9.0 發布
版本更新概況[New]增加HPM6P00系列MCU以及hpm6p00evk支持[New]增加了開發板已知問題說明[Update]將全系列開發板VCore電壓調節至1.275V,
600MHz RISC-V 雙核加持!先楫HPM6P00重新定義國產高性能混合信號MCU
2025年3月25日,上海——高性能微控制器及嵌入式解決方案提供商上海先楫半導體科技有限公司(先楫



 工商網監
工商網監
評論