") 4D毫米波雷達突破了傳統(tǒng)雷達的局限性
4D毫米波雷達突破了傳統(tǒng)雷達的局限性

自動駕駛需要構(gòu)建全頻譜感知能力 在汽車智能化發(fā)展道路中,感知系統(tǒng)是至關(guān)重要的一環(huán),理想的自動駕駛系統(tǒng)需要全天候、全覆蓋、全目標、全工況的感知。當前的自動駕駛技術(shù)水平離理想目標還有較大差距,為了實現(xiàn)高階自駕,需要在全頻段上構(gòu)建感知系統(tǒng),有效融合各頻段傳感器的優(yōu)勢,為規(guī)劃控制提供準確有效的信息。 現(xiàn)階段自動駕駛技術(shù)中,主要用到的傳感器有攝像頭、激光雷達和毫米波雷達。攝像頭的光譜從可見光到紅外光譜,是最接近人眼的傳感器,有豐富的語義信息,在傳感器中具有不可替代的作用,比如紅綠燈識別、交通標識識別,都離不開攝像頭的信息。激光雷達器件較為成熟,905nm波段廣泛應用,能獲得豐富的場景立體空間信息。從頻譜可以看到,激光在頻譜上和可見光較為接近,因此和可見光有著相似的粒子特性,容易受到惡劣天氣的影響。而毫米波雷達波長為3.9mm附近,是這幾種傳感器中波長最長的傳感器,全天候性能最好,且具備速度探測優(yōu)勢。 攝像頭和激光雷達由于有較為豐富的信息,前期的自動駕駛感知研究主要集中這兩類傳感器,毫米波由于分辨率不足導致其在使用上存在局限性。近年來,各大毫米波廠商在4D毫米波雷達上加大投入,在超寬帶和大天線陣列兩個方向上取得了一些進展,這使得4D毫米波的研究成為了自動駕駛研究的熱點之一。
4D毫米波雷達突破了傳統(tǒng)雷達的局限性 隨著毫米波芯片技術(shù)的發(fā)展,應用于車載的毫米波雷達系統(tǒng)得到了大規(guī)模應用,然而傳統(tǒng)雷達系統(tǒng)面臨著以下缺陷:
當有靜止車輛,目標信息容易和地雜波等摻雜在一起,識別難度較大,而移動車輛可以靠多普勒識別。
當有橫穿車輛和行人, 多普勒為零或很低,難以檢測。
沒有高度信息,高處物體如橋粱路牌和地面的車輛一樣區(qū)分不開,容易造成誤剎,影響安全性。
角度分辨率低,當兩個距離很近的物體,其回波會被混在一起,很難知道有幾個目標。
用雷達散射截面積區(qū)分物體難:可以通過不同物體的雷達散射截面積的不同和不同幀之間的反射點的不同來區(qū)分路牌、立交橋和車輛,然而準確率并不高。
最遠探測距離不超過200 m,探測距離范圍有限。
而4D毫米波雷達技術(shù)突破了傳統(tǒng)車載雷達的局限性,可以以很高的分辨率同時探測目標的距離、速度、水平方位和俯仰方位,使得:
最遠探測距離大幅可達300多米,比激光雷達和視覺傳感器都要遠
4D毫米波雷達系統(tǒng)水平角度分辨率較高,通常可以達到1 的角度分辨率,可以區(qū)分 300m 處的兩輛近車
4D毫米波雷達系統(tǒng)可以測量俯仰角度,可達到優(yōu)于2°的角度分辨率,可在 150m 處區(qū)分地物和立交橋。
當有橫穿車輛和行人, 多普勒為零或很低時通過高精度的水平角和高精度的俯仰角可以有效識別目標。
目標點云更密集,信息更豐富,更適合與深度學習框架結(jié)合。
4D毫米波雷達的先驅(qū)者 為對4D成像雷達系統(tǒng)有更系統(tǒng)的認識,這里我們列舉了近年來市面上幾種常見的成像雷達系統(tǒng)方案,其中包括TI公司、Arbe公司、Uhnder公司。
TI級聯(lián)方案---毫米波成像雷達系統(tǒng)的開辟者
在TI公司早期推出的毫米波雷達芯片AWR1243中通過發(fā)射FMCW信號來探測目標的距離和速度,而使用時分波形的方式將三個發(fā)射和四個接收構(gòu)成的12個虛擬通道來探測角度,然而受限于角度分辨率,其獲取的目標信息有效。而TI公司于19年推出了自己的毫米波雷達系統(tǒng)級聯(lián)方案,其級聯(lián)效果如圖1中所示,通過將四個三發(fā)四收的單個MIMO芯片級聯(lián)方案可以構(gòu)成12發(fā)16收的MIMO雷達陣列,此時雷達系統(tǒng)的虛擬通道數(shù)可從12提升到了192,該方法可以極大的提升了雷達系統(tǒng)的角度分辨率。在圖1所使用的級聯(lián)雷達系統(tǒng)中水平角度分辨率可達到1.4°,俯仰角度分辨率可達到18°的效果。 目前國內(nèi)有不少廠商依托于TI成像雷達系統(tǒng)的級聯(lián)方案進行系統(tǒng)改進,以達到更好的角度分辨率,級聯(lián)方案來搭建成像雷達系統(tǒng)已成為當下的主流技術(shù)。
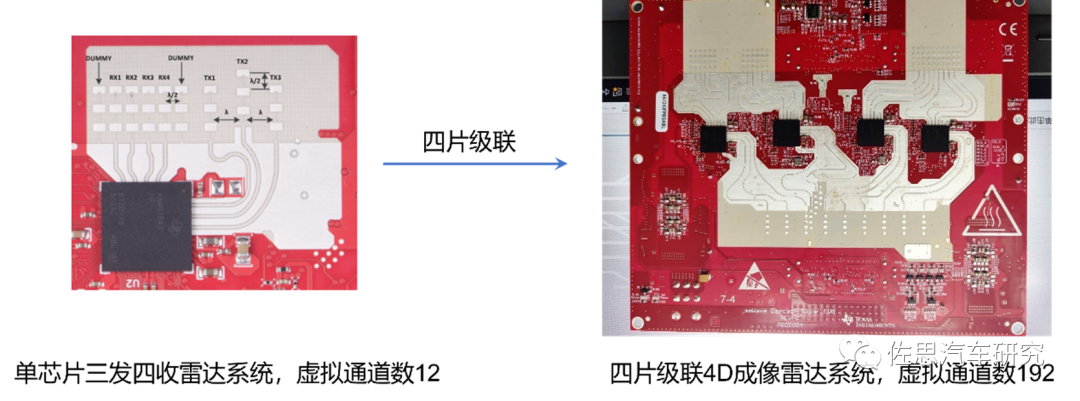
圖1 TI級聯(lián)系統(tǒng)實物圖
Arbe毫米波成像雷達系統(tǒng)---超大陣列和專用處理器方案
除了TI公司開發(fā)的級聯(lián)雷達系統(tǒng)方案,以色列Arbe公司開發(fā)出了目前最大的48發(fā)48收級聯(lián)雷達系統(tǒng)方案,其虛擬通道數(shù)可以達到驚人的2304,大大的提升了毫米波雷達系統(tǒng)的角度分辨率,與此同時隨著虛擬通道數(shù)的增加,傳統(tǒng)的處理器無法解決毫米波雷達系統(tǒng)信號處理和數(shù)據(jù)處理,Arbe公司也推出了自己的專用毫米波雷達處理器芯片,使得毫米波雷達系統(tǒng)的集成度更高,數(shù)據(jù)處理更加高效。圖2中為Arbe公司成像雷達系統(tǒng)實物圖,從圖中可以看出該成像雷達系統(tǒng)采用口字型陣列來設(shè)計MIMO雷達,可同時在水平維度和俯仰維度探測目標。圖3中為Arbe公司雷達專用處理器框圖,從其展現(xiàn)的框圖中可以看出,在該專用處理器中增加了其獨有的雷達信號處理硬件加速模塊,以更好的解決成像雷達系統(tǒng)中數(shù)據(jù)高吞吐量的問題。 從Arbe的技術(shù)方案中可以看出,超大規(guī)模的MIMO陣列將可能是一種技術(shù)趨勢,而在使用超大規(guī)模MIMO陣列后需要考慮產(chǎn)生的海量數(shù)據(jù)如何有效處理的問題,因此專用的成像雷達系統(tǒng)硬件加速模塊是需要的,關(guān)于這點國內(nèi)還比較空白。
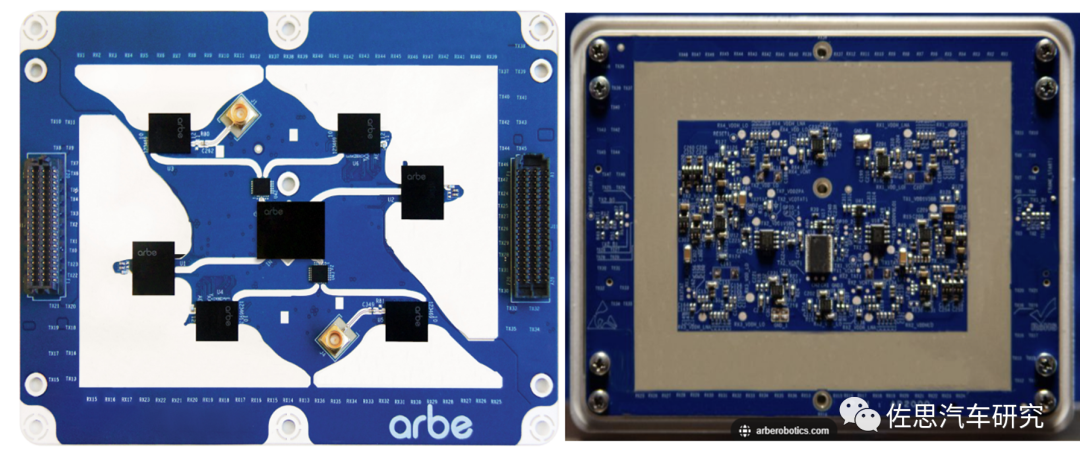
圖2 Arbe成像雷達系統(tǒng)實物圖
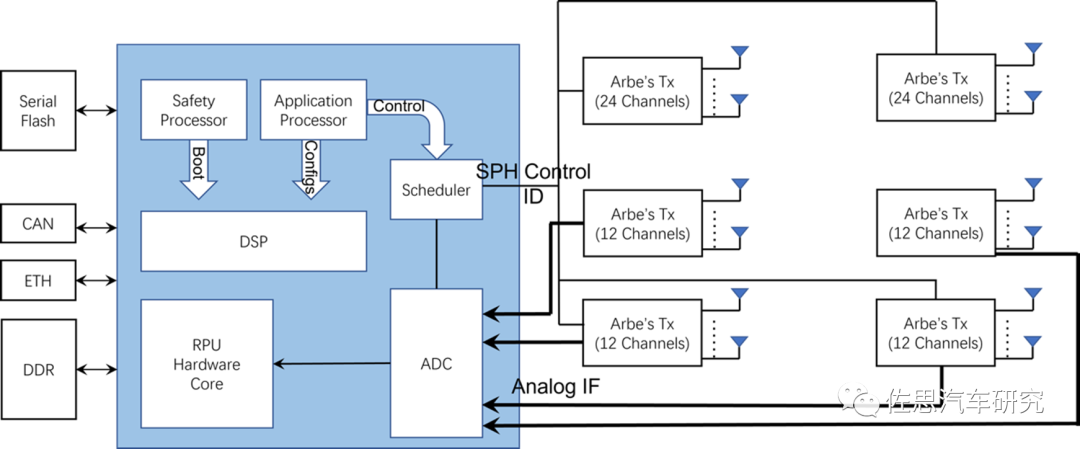
圖3 Arbe成像雷達系統(tǒng)專用處理器框圖
Uhnder公司---PMCW雷達的領(lǐng)跑者
不同于傳統(tǒng)FMCW信號波形,Uhnder公司采用的PMCW波形通過多天線同時發(fā)射正交相位編碼信號的方式來探測目標的距離和速度,該方案不僅可以探測更遠距離,同時在有效探測目標的同時可以有效的抗除雷達與雷達之間的相互干擾。在19年的ISSCC論文[1]中Uhnder公司已經(jīng)發(fā)表了其相關(guān)研究成果,在單科芯片中集成12發(fā)16收的雷達陣列。
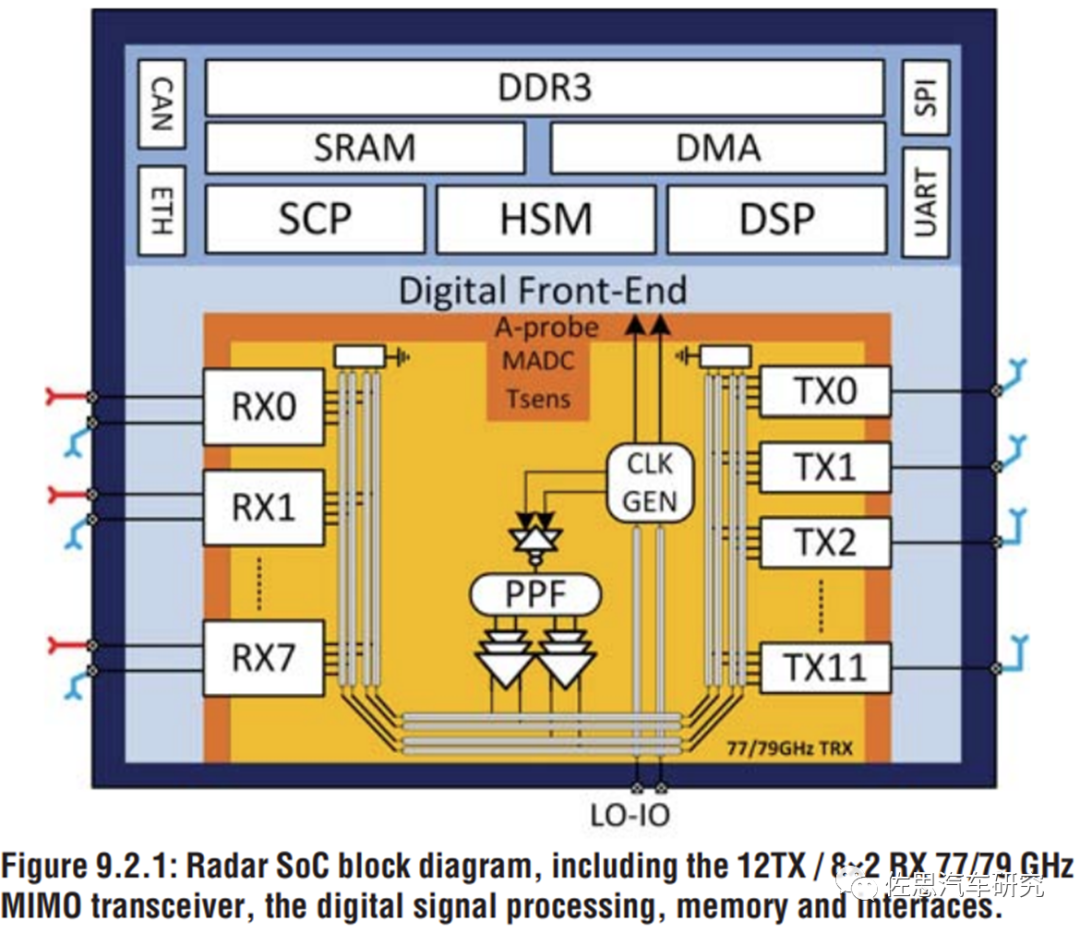
圖4 Uhnder公司高集成成像雷達系統(tǒng)[1]
4D毫米波成像雷達系統(tǒng)中的難點 總結(jié)以上公司的技術(shù)演進路線,我們可以發(fā)現(xiàn)在4D毫米波成像雷達系統(tǒng)存在以下亟需解決的技術(shù)難題:
1)、成像雷達系統(tǒng)的陣列設(shè)計問題
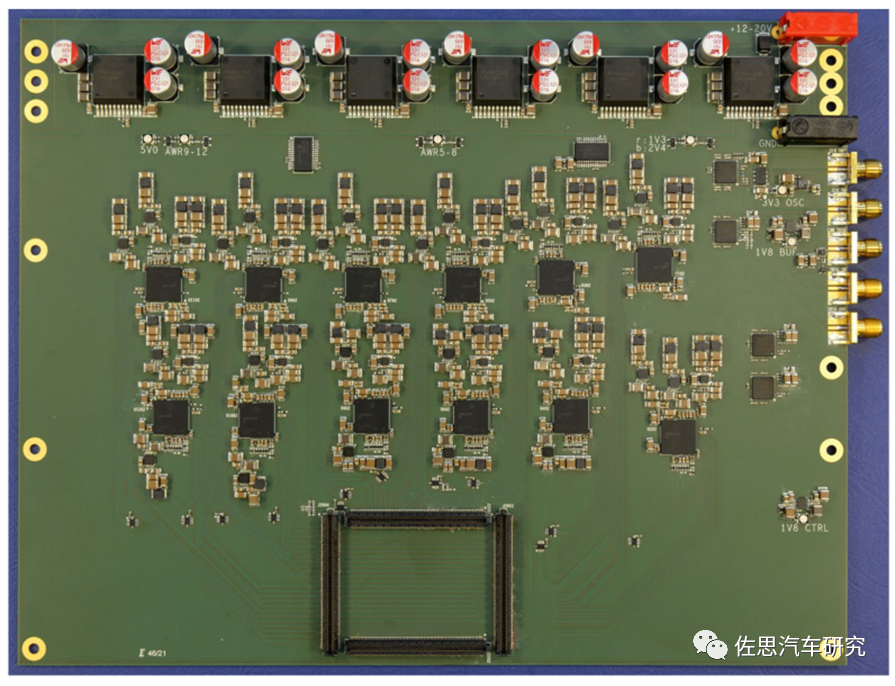
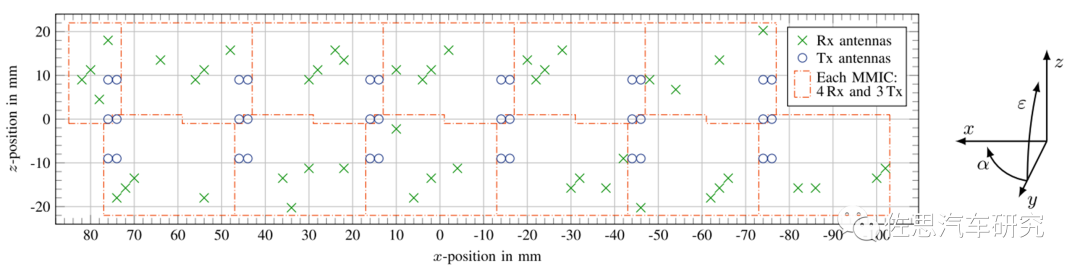
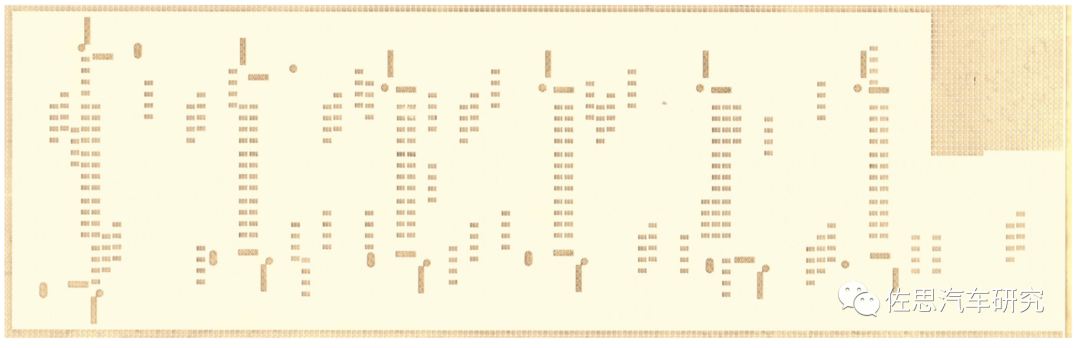
在4D毫米波雷達系統(tǒng)中,通過MIMO使得系統(tǒng)虛擬通道數(shù)得到了極大提升,因此如何設(shè)計陣列以達到高精度的角度分辨率成為其中的一個難題。在已有的學術(shù)研究[2]中將12個3發(fā)4收的MIMO芯片進行級聯(lián),構(gòu)成36發(fā)48收MIMO雷達系統(tǒng),可達到1728個虛擬通道。而文中通過遺傳算法來設(shè)計稀疏陣列,使得雷達孔徑更大,水平角分辨率可達到0.78°,俯仰角分辨率可達到3.6°。可以發(fā)現(xiàn)隨著天線數(shù)的增多,在未來的成像雷達系統(tǒng)中,其陣列排布和角度分辨率將會得到更一步的優(yōu)化和提升。
(a)
(b)
(c)
圖5 文獻[2]中的4D成像雷達系統(tǒng);(a)芯片級聯(lián)硬件實物;(b)優(yōu)化后的36發(fā)48收稀疏陣列示意圖;(c) 優(yōu)化后的36發(fā)48收稀疏陣列實物圖
2)、成像雷達波形設(shè)計問題
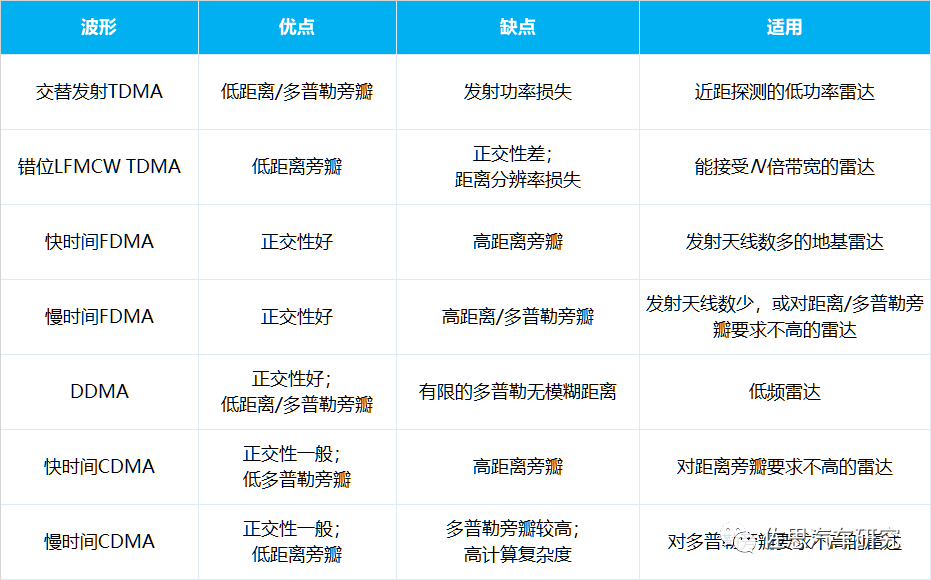
與傳統(tǒng)相控陣雷達相比,MIMO雷達的最大特點在于采用波形分集技術(shù)。波形相關(guān)系數(shù)是表示波形分集的重要參數(shù),MIMO雷達的各天線發(fā)射正交信號,波形間的相關(guān)系數(shù)為0,在空間形成低增益寬波束,接收端通過DBF合成多個接收波束,實現(xiàn)覆蓋大空域的探測。對于MIMO正交波形設(shè)計,使用者希望設(shè)計的波形盡可能地具備高分辨率、低旁瓣、良好的正交性,目前常用的四種方法為時分復用(TDMA)、頻分復用(FDMA)、多普勒分集復用(DDMA)、碼分復用(CDMA)等。表1中對各類正交波形做了總結(jié),現(xiàn)有的雷達芯片中已經(jīng)可以支持交替發(fā)射TDMA、CDMA和DDMA波形,因此如何復用波形以提升陣列使用效率成為設(shè)計者應該思考的問題。
表1正交波形總結(jié)
3)、成像雷達抗干擾問題
隨著車輛使用毫米波雷達系統(tǒng)的增多,雷達與雷達之間的干擾日益嚴重,如圖6中所示雷達B1和雷達B2在相同的中心頻率內(nèi)使用線性調(diào)頻信號,很容易產(chǎn)生相互之間的干擾,為此如何消除系統(tǒng)干擾成為待解決的難題。
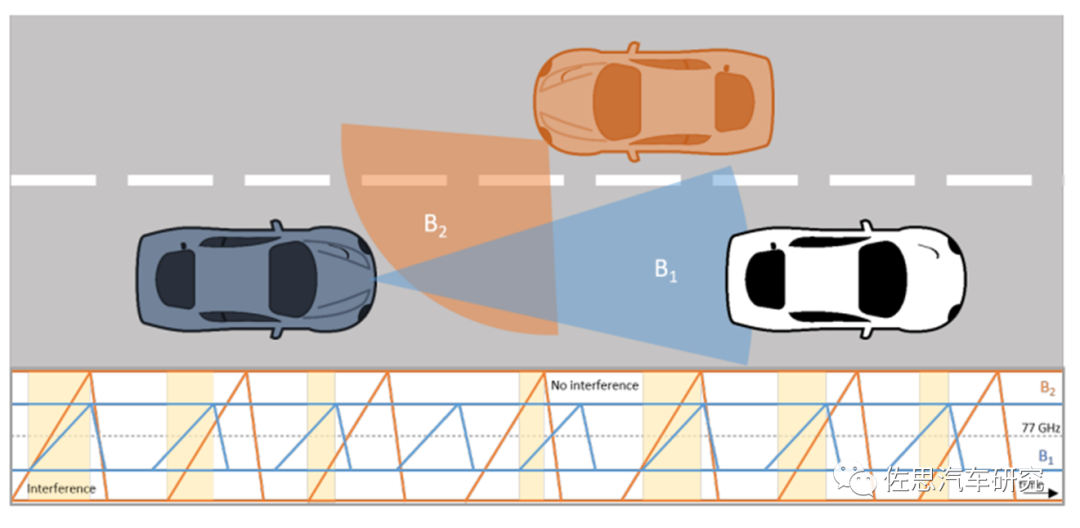
圖6 雷達與雷達之間相互干擾示意圖
為此,不同的公司開發(fā)出不同的方案來解決該問題。如圖7中所示,為Arbe公司的波形設(shè)計專利中使用多個頻率跳動的窄帶信號合成寬帶信號來規(guī)避雷達之間的相互干擾。當然,該方法的正確與否還有待研究與挖掘。
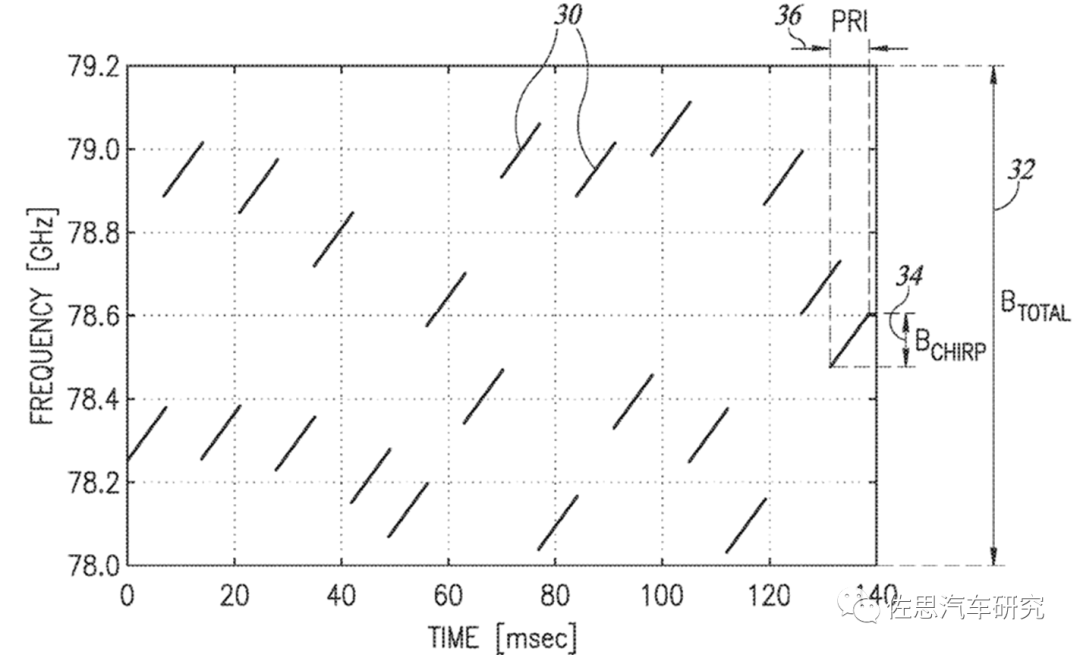
圖7 Arbe專利中的跳頻波形設(shè)計以消除雷達之間的干擾
4)、毫米波雷達專用處理器問題
隨著毫米波雷達系統(tǒng)通道數(shù)的增多,傳統(tǒng)的處理器無法滿足毫米波雷達系統(tǒng)大吞吐量數(shù)據(jù)的需求,因此迫切需要設(shè)計符合大陣列大吞吐量的雷達專用處理器芯片,近年來除了arbe公司提出了自己的專用處理器方案外,也有像NXP這樣的老牌玩家在設(shè)計相關(guān)的雷達專用處理器模塊。
4D毫米波雷達的深度學習初探 4D毫米波雷達相較于傳統(tǒng)的3D毫米波雷達有更豐富的信息,如何有效的將深度學習框架應用到4D毫米波雷達中是自動駕駛性能提升的關(guān)鍵技術(shù)之一。從傳統(tǒng)3D毫米波雷達的信號處理流程中我們可以看到,頻信號經(jīng)過ADC后接入毫米波預處理流程,經(jīng)過距離和速度2個維度的FFT之后,進行CFAR檢測在空間維度上剔除大量噪聲,然后利用第3個維度的FFT來獲取波達角,生成稀疏點云,繼而進行聚類和跟蹤,最后進行目標分類后輸出。
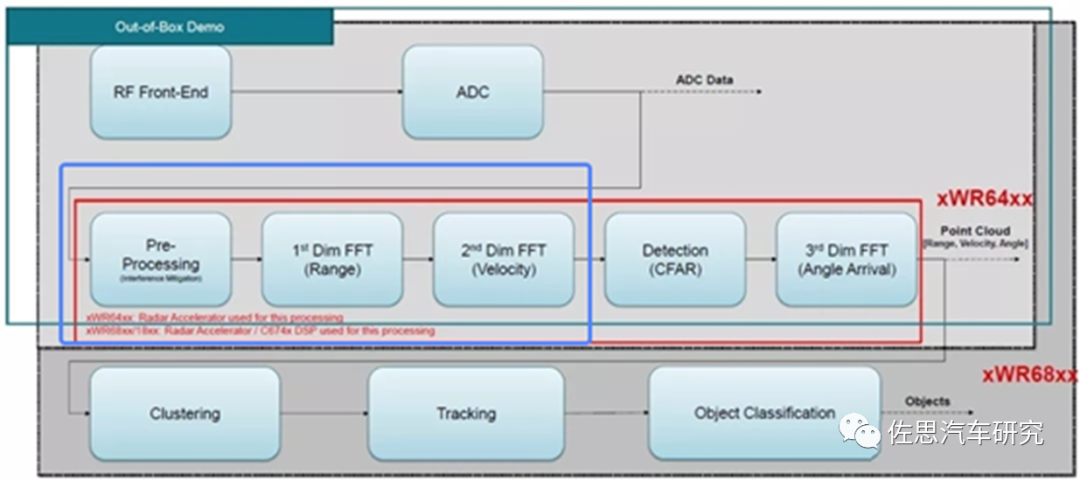
圖8 TI IWR6843雷達信號處理框圖
4D毫米波雷達增大了天線陣列,除了能增加高度信息外,還能提供更為豐富的點云信息,當點云信息足夠豐富時,我們可以借鑒激光雷達的信號處理方式,采用類似于Voxelnet、CenterPoint、PointPillar等3D或2D網(wǎng)絡(luò)來進行特征提取和識別。 在最新的研究中,也有人提出在進行距離和速度2個維度的FFT之后,不進行CFAR步驟,而直接進行第3個維度的FFT來獲取4D張量信息,然后基于這個4D張量進行特征提取和識別。這種方式可以最大程度地保留有效信息,但是由于沒有進行CFAR步驟,需要處理的數(shù)據(jù)量非常大,對于系統(tǒng)的帶寬和算力都提出了較高的要求。
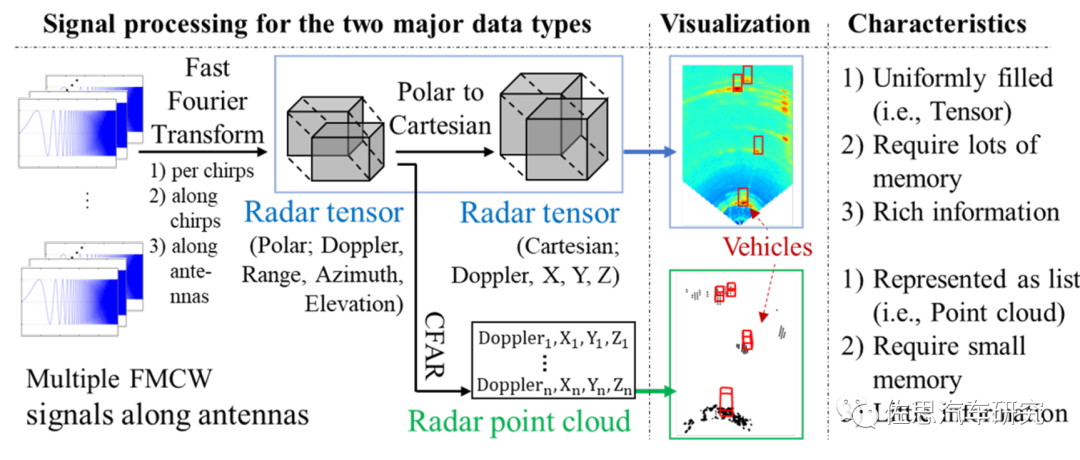
圖9 文獻[3]中基于張量的4D雷達識別方法
毫米波雷達與激光雷達----路在何方? 總體而言目前毫米波雷達系統(tǒng)仍處于百家爭鳴的戰(zhàn)國時代,盡管每家公司的雷達系統(tǒng)方案并不相同,然而都面臨著算法和硬件系統(tǒng)的困境,亟需從算法、芯片和系統(tǒng)層面解決以上問題。 筆者認為隨著毫米波雷達系統(tǒng)的發(fā)展,其角度分辨率會逐漸逼近0.1°,而達到一些低端激光雷達的效果。不同于激光雷達系統(tǒng)直接對點云數(shù)據(jù)處理的固定方式,4D毫米波雷達系統(tǒng)自由的陣列和波形設(shè)計提高了系統(tǒng)的使用門檻,但也給了用戶更多的發(fā)揮空間。而毫米波雷達系統(tǒng)相比于激光雷達,其波長更長,具有較為適宜的大氣窗口,在全天候方面更具優(yōu)勢。FMCW在毫米波雷達上的成功經(jīng)驗已經(jīng)被借鑒到激光雷達領(lǐng)域,1550nm FMCW激光雷達技術(shù)增加了速度維信息,抗干擾能力強,但離成熟商用還有一段時間的路要走。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2576文章
55032瀏覽量
791259 -
雷達
+關(guān)注
關(guān)注
52文章
3327瀏覽量
123876 -
毫米波
+關(guān)注
關(guān)注
21文章
2030瀏覽量
67802
原文標題:4D毫米波雷達處于革命前夜
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
突破10米限制:解碼飛睿智能UWB毫米波雷達融合感知技術(shù)

突破10米限制:解碼飛睿智能UWB毫米波雷達融合感知技術(shù)
德賽西威發(fā)布首款支持衛(wèi)星架構(gòu)的8T8R 4D毫米波雷達
4D毫米波雷達為什么稱為激光雷達的“替身”?
4D毫米波雷達上車!國產(chǎn)PMIC新品破局供電瓶頸,紋波低于5mV

自動駕駛中4D毫米波雷達在雨霧中更具優(yōu)勢嗎?

微波雷達和毫米波雷達有什么區(qū)別
4D毫米波雷達比3D毫米波雷達到底強在哪兒?


4D毫米波雷達加速上車,加特蘭微、隔空微和華為放出哪些大招?

自動駕駛毫米波雷達之間會相互干擾嗎?

多毫米波雷達的實車連續(xù)測量應用案例
4D毫米波雷達能取代激光雷達嗎?

黑芝麻智能視覺與4D毫米波雷達前融合算法介紹

ADAS和防撞系統(tǒng)中的毫米波雷達方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論