") 基于帶約束強(qiáng)化學(xué)習(xí)的 BPP-1 求解
基于帶約束強(qiáng)化學(xué)習(xí)的 BPP-1 求解

國防科技大學(xué)、克萊姆森大學(xué)和視比特機(jī)器人的研究人員合作使用深度強(qiáng)化學(xué)習(xí)求解在線裝箱問題,該方法的性能表現(xiàn)優(yōu)于現(xiàn)有的啟發(fā)式算法。用戶研究顯示,該算法達(dá)到甚至超越了人類的在線碼垛水平。作者團(tuán)隊還將訓(xùn)練模型部署到了工業(yè)機(jī)器人上,實(shí)現(xiàn)了業(yè)界首個高效能(連續(xù)碼放 50 個以上隨機(jī)尺寸箱子,空間利用率大于 70%)無序混合碼垛機(jī)器人。
在物流倉儲場景中,無序混合紙箱碼垛機(jī)器人有著大量的應(yīng)用需求。對于亂序到來的、多種尺寸規(guī)格的箱子,如何用機(jī)器人實(shí)現(xiàn)自動、高效的碼垛,節(jié)省人力的同時提升物流周轉(zhuǎn)效率,是物流倉儲自動化的一個難點(diǎn)問題。其核心是求解裝箱問題(Bin Packing Problem,BPP)這一經(jīng)典的 NP 難題,即為每一個紙箱規(guī)劃在容器中的擺放位置,以最大化容器的空間利用率。求解 BPP 問題的傳統(tǒng)方法大多是基于啟發(fā)式規(guī)則的搜索。
在實(shí)際應(yīng)用場景中,機(jī)器人往往無法預(yù)先看到傳送帶上即將到來的所有箱子,因而無法對整個箱子序列進(jìn)行全局最優(yōu)規(guī)劃。因而現(xiàn)有的 BPP 方法無法被直接用于真實(shí)物流場景。
事實(shí)上,人可以根據(jù)即將到來的幾個箱子的形狀尺寸,很快地做出決策,并不需要、也無法做到對整個箱子序列的全局規(guī)劃。這種僅僅看到部分箱子序列的裝箱問題,稱為在線裝箱問題(Online BPP)。物流輸送線邊上的箱子碼垛任務(wù)一般都可以描述為 Online BPP 問題。因此,該問題的求解對于開發(fā)真正實(shí)用的智能碼垛機(jī)器人有重要意義。
在 Online BPP 問題中,機(jī)器人僅能觀察到即將到來的 k 個箱子的尺寸信息(即前瞻 k 個箱子),我們稱其為 BPP-k 問題。對按序到來的箱子,機(jī)器人必須立即完成規(guī)劃和擺放,不允許對已經(jīng)擺放的箱子進(jìn)行調(diào)整,同時要滿足箱子避障和放置穩(wěn)定性的要求,最終目標(biāo)是最大化容器的空間利用率。Online BPP 問題的復(fù)雜度由箱子規(guī)格、容器大小、箱子序列的分布情況、前瞻數(shù)量等因素共同決定。由于僅知道部分箱子序列的有限信息,以往的組合優(yōu)化方法難以勝任。
近日,國防科技大學(xué)、克萊姆森大學(xué)和視比特機(jī)器人的研究人員合作提出了使用深度強(qiáng)化學(xué)習(xí)求解這一問題。該算法性能優(yōu)異,實(shí)現(xiàn)簡單,可適用于任意多個前瞻箱子的情形,擺放空間利用率達(dá)到甚至超過人類水平。同時,該團(tuán)隊結(jié)合 3D 視覺技術(shù),實(shí)現(xiàn)了業(yè)界首個高效能無序混合碼垛機(jī)器人。論文已被人工智能頂會 AAAI 2021 大會接收。

論文鏈接:https://arxiv.org/abs/2006.14978
方法介紹
作者使用帶約束的深度強(qiáng)化學(xué)習(xí)求解 BPP-1 問題,即只能前瞻一個箱子的情形。然后基于蒙特卡洛樹搜索實(shí)現(xiàn)了從 BPP-1 到 BPP-k 的拓展。下圖 1 給出了 BPP-1 和 BPP-k 問題的場景示意。
圖 1(上):BPP-1的場景示意,綠色箱子為前瞻箱子。
圖1(下):BPP-k 問題的場景示意,綠色箱子為前瞻箱子。
基于帶約束強(qiáng)化學(xué)習(xí)的 BPP-1 求解
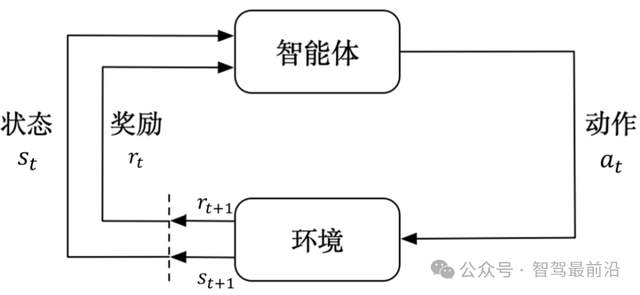
強(qiáng)化學(xué)習(xí)是一種通過自我演繹并從經(jīng)驗(yàn)中學(xué)習(xí)執(zhí)行策略的算法,很適合求解 Online BPP 這種基于動態(tài)變化觀察的序列決策問題。同時,堆箱子過程的模擬仿真非常「廉價」,因而強(qiáng)化學(xué)習(xí)算法可以在模擬環(huán)境中大量執(zhí)行,并從經(jīng)驗(yàn)中學(xué)習(xí)碼垛策略。然而,將強(qiáng)化學(xué)習(xí)算法應(yīng)用到 Online BPP 上面臨幾個方面的挑戰(zhàn):首先,如果將水平放置面劃分成均勻網(wǎng)格,BPP 的動作空間會非常大,而樣本效率低下的強(qiáng)化學(xué)習(xí)算法并不擅長應(yīng)對大動作空間的問題;此外,如何讓強(qiáng)化學(xué)習(xí)算法更加魯棒、高效地學(xué)習(xí)箱子放置過程中的物理約束(如碰撞避免、穩(wěn)定支持等),也是需要專門設(shè)計的。
為了提升算法的學(xué)習(xí)效率,同時保證碼放的物理可行性和穩(wěn)定性,作者在 Actor-Critic 框架基礎(chǔ)上引入了一種「預(yù)測 - 投影」的動作監(jiān)督機(jī)制(圖 2)。該方法在學(xué)習(xí) Actor 的策略網(wǎng)絡(luò)和 Critic 的 Q 值(未來獎勵的期望)網(wǎng)絡(luò)之外,還讓智能體「預(yù)測」當(dāng)前狀態(tài)下的可行動作空間(可行掩碼,feasibility mask)。在訓(xùn)練過程中,依據(jù)預(yù)測得到的可行掩碼將探索動作「投影」到可行動作空間內(nèi),再進(jìn)行動作采樣。這樣的有監(jiān)督可行性預(yù)測方法,一方面可以讓強(qiáng)化學(xué)習(xí)算法快速學(xué)習(xí)到物理約束,另一方面也盡可能避免了訓(xùn)練中箱子放置到不可行位置而提前終止序列,從而顯著提升訓(xùn)練效率。
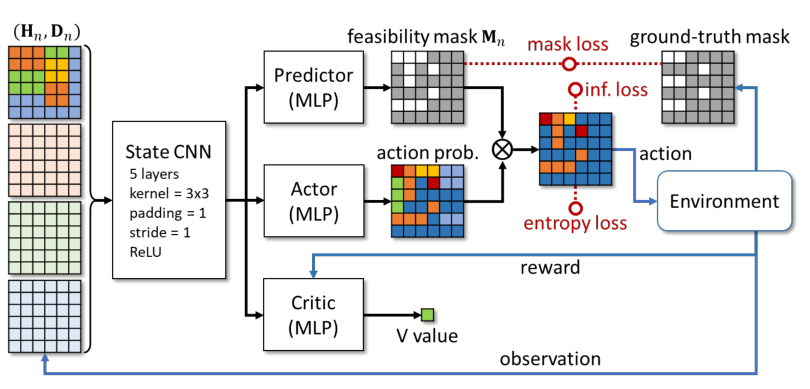
圖 2:基于「預(yù)測 - 投影」的動作監(jiān)督機(jī)制實(shí)現(xiàn)帶約束的深度強(qiáng)化學(xué)習(xí)。
基于蒙特卡洛樹搜索的 BPP-k 擴(kuò)展
圖 3:本文算法的空間利用率與前瞻箱子個數(shù)正相關(guān)。
如果算法能夠在碼放當(dāng)前箱子的同時考慮之后到來的箱子尺寸,可能會得到更好的碼放效果(如圖 3 所示)。對于前瞻 k(k》1)個箱子的情況,一種方法是直接學(xué)習(xí)前瞻多個箱子的碼放策略。但是,這種策略往往難以在任意前瞻箱子數(shù)目上很好地泛化。針對不同的 k 單獨(dú)訓(xùn)練一種策略顯然是不夠聰明的做法。
對此,本文的處理方法是基于 BPP-1 這一基礎(chǔ)策略,通過排序樹搜索的方法拓展到 BPP-k 的情況。事實(shí)上,前瞻多個箱子的基本思想,就是在擺放當(dāng)前箱子時,為后續(xù)箱子「預(yù)留」合適的空間,以使得這些箱子的整體擺放空間利用率更高。「預(yù)留」暗含了對于 k 個前瞻箱子的不同排序。因此,我們只需要搜索 k 個前瞻箱子的不同排序(圖 4),找出一種空間利用率最高的排序,該序列所對應(yīng)的當(dāng)前箱子的擺放位置,即為當(dāng)前箱子的最佳擺放位置。這樣的處理方式,等同于在當(dāng)前箱子的擺放過程中考慮了后來的箱子。不過,需要注意的是,在這些虛擬的擺放序列中,實(shí)際順序中先到的箱子不能擺在后到的上面。
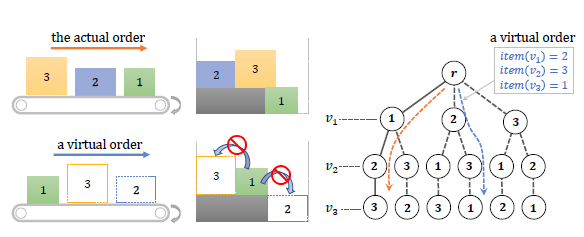
圖 4:箱子的真實(shí)順序(左上)和虛擬重排順序(左下,實(shí)際順序靠前的箱子不能放在實(shí)際順序靠后箱子的上面),右邊展示了不同序列的排序樹。
顯然,考慮所有的排序可能很快帶來組合爆炸問題。為此,作者使用蒙特卡洛樹搜索(MCTS)來減小搜索空間。作者基于 critic 網(wǎng)絡(luò)輸出的 Q 值,對從當(dāng)前狀態(tài)之后可能得到的獎勵進(jìn)行估計。在排序樹搜索過程中,優(yōu)先選擇可能得到更高獎勵的節(jié)點(diǎn)進(jìn)行展開。這樣可將搜索復(fù)雜度控制在線性級別。
此外,作者還介紹了處理箱子水平旋轉(zhuǎn)和多容器碼放的擴(kuò)展情況。如果碼放過程中允許箱子水平旋轉(zhuǎn),則只需將 BPP-1 模型中的動作空間和可行掩碼同時復(fù)制,分別處理兩種朝向。針對多容器碼放,算法需要對箱子放入每個容器所帶來的 Q 值變化進(jìn)行量化:作者使用 critic 網(wǎng)絡(luò)對箱子碼放到某個容器前后的 Q 值進(jìn)行評估,每次都將箱子放入 Q 值下降最小的容器內(nèi)。
實(shí)驗(yàn)結(jié)果
在 BPP-1 上,作者將本文方法和其他啟發(fā)式算法進(jìn)行了對比(圖 5)。在三種不同數(shù)據(jù)集上,基于深度強(qiáng)化學(xué)習(xí)算法的性能顯著優(yōu)于人為設(shè)計啟發(fā)式規(guī)則(尤其是面向 Online BPP 的)。
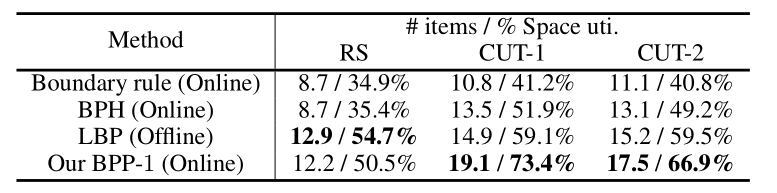
圖 5:深度強(qiáng)化學(xué)習(xí)算法和啟發(fā)式算法在 BPP-1 問題上的性能(擺放箱子數(shù)目和空間利用率)對比。
同樣在 BPP-1 問題上,作者針對不同的約束項(xiàng)進(jìn)行了消融實(shí)驗(yàn)(圖 6):MP - 可行掩碼預(yù)測;MC - 可行掩碼投影;FE - 動作熵(多樣性)最大化。實(shí)驗(yàn)結(jié)果表明,在訓(xùn)練過程中加入可行動作約束對訓(xùn)練效果有顯著提升。
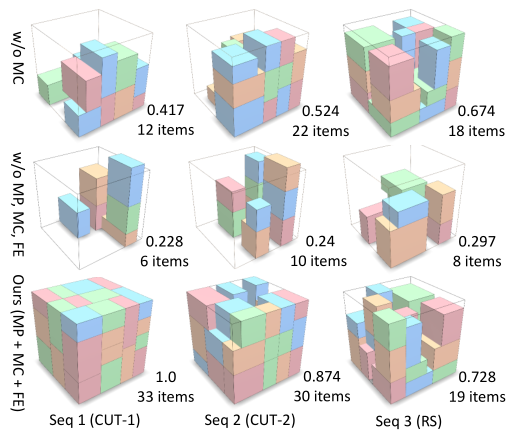
圖 6:本文算法在 BPP-1 問題上的消融實(shí)驗(yàn)
作者在 BPP-k 上驗(yàn)證了排序樹搜索可以使空間利用率隨著前瞻數(shù)量 k 的提升而提升(圖 7b),而使用蒙特卡洛樹搜索可以在不明顯影響性能的前提下,顯著降低排序樹搜索的時間開銷(圖 7a)。此外,作者針對 BPP-1 進(jìn)行了用戶研究,比較本文 BPP-1 算法和人擺放的空間利用率。如圖 7c 所示,本文方法超越了人類擺放的性能:在總共 1851 個高難度隨機(jī)箱子序列中,人類獲勝的次數(shù)是 406 次,平均性能表現(xiàn)是 52.1%,而強(qiáng)化學(xué)習(xí)獲勝的次數(shù)是 1339 次,平均性能表現(xiàn)是 68.9%。
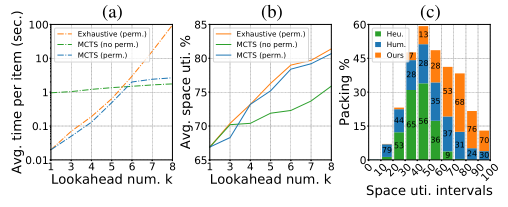
圖 7 (a):窮舉排序數(shù)搜索和 MCTS 算法的時間開銷對比;(b):窮舉排序數(shù)搜索和 MCTS 算法的時間開銷對比;(c):本文算法、啟發(fā)式算法 BPH 和人類用戶的碼放性能對比。
對于不同的前瞻箱子數(shù),本文方法和啟發(fā)式算法 BPH 的性能對比情況如圖 8 所示。盡管 BPH 算法允許對前瞻箱子的順序進(jìn)行任意調(diào)整而本文方法不允許,但本文方法仍然能取得更好的性能。
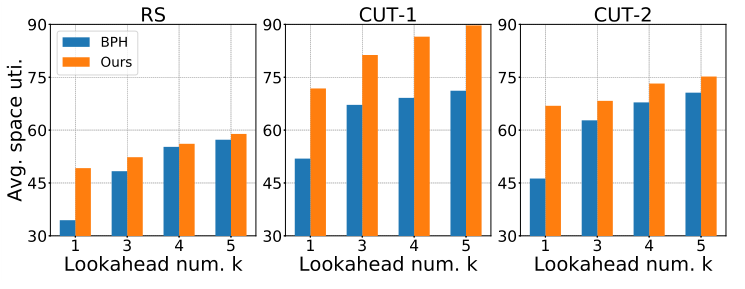
圖 8:在三個數(shù)據(jù)集上的 BPP-k 任務(wù)中,深度強(qiáng)化學(xué)習(xí)算法與啟發(fā)式算法的性能對比。
為驗(yàn)證本文算法的有效性,作者團(tuán)隊將模型部署到工業(yè)機(jī)器人上,實(shí)現(xiàn)了一個智能碼垛機(jī)器人(圖 9,查看完整視頻)。將仿真環(huán)境訓(xùn)練的策略應(yīng)用到真實(shí)環(huán)境,涉及從虛擬到真實(shí)環(huán)境的策略遷移(Sim2Real)問題。為此,作者基于「Real2Sim」的思路,采用 3D 視覺算法,實(shí)時檢測容器上箱子的真實(shí)擺放情況,并轉(zhuǎn)換為與虛擬世界對應(yīng)的理想 box 表示,作為強(qiáng)化學(xué)習(xí)模型的輸入。對于亂序到來的隨機(jī)尺寸箱子,該機(jī)器人能夠連續(xù)、穩(wěn)定、快速碼放數(shù)十個箱子,容器空間利用率達(dá)到 70% 以上,性能遠(yuǎn)超現(xiàn)有同類型機(jī)器人。
圖9: 基于深度強(qiáng)化學(xué)習(xí)的高效能無序混合碼垛機(jī)器人。
責(zé)任編輯:lq
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222282 -
算法
+關(guān)注
關(guān)注
23文章
4784瀏覽量
98076 -
強(qiáng)化學(xué)習(xí)
+關(guān)注
關(guān)注
4文章
270瀏覽量
11970
原文標(biāo)題:強(qiáng)化學(xué)習(xí)與3D視覺結(jié)合新突破:高效能在線碼垛機(jī)器人
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
自動駕駛中常提的離線強(qiáng)化學(xué)習(xí)是什么?
強(qiáng)化學(xué)習(xí)會讓自動駕駛模型學(xué)習(xí)更快嗎?

多智能體強(qiáng)化學(xué)習(xí)(MARL)核心概念與算法概覽

輸入引腳時鐘約束_Xilinx FPGA編程技巧-常用時序約束詳解
上汽別克至境E7首發(fā)搭載Momenta R6強(qiáng)化學(xué)習(xí)大模型
如何訓(xùn)練好自動駕駛端到端模型?

今日看點(diǎn):智元推出真機(jī)強(qiáng)化學(xué)習(xí);美國軟件公司SAS退出中國市場
自動駕駛中常提的“強(qiáng)化學(xué)習(xí)”是個啥?

NVIDIA Isaac Lab可用環(huán)境與強(qiáng)化學(xué)習(xí)腳本使用指南

在友晶DE1-SOC開發(fā)板實(shí)現(xiàn)Chirikov標(biāo)準(zhǔn)映射求解器
Simcenter STAR-CCM+在燃燒學(xué)方面的應(yīng)用:提供了一個可以高效、高保真進(jìn)行燃燒仿真的迅速而可擴(kuò)展的化學(xué)求解器

【書籍評測活動NO.62】一本書讀懂 DeepSeek 全家桶核心技術(shù):DeepSeek 核心技術(shù)揭秘
在阿里云PAI上快速部署NVIDIA Cosmos Reason-1模型
18個常用的強(qiáng)化學(xué)習(xí)算法整理:從基礎(chǔ)方法到高級模型的理論技術(shù)與代碼實(shí)現(xiàn)

一文詳解Vivado時序約束



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論