運(yùn)行平穩(wěn),客戶服務(wù)與交付保障有力。 ? 而這次回應(yīng),正是針對(duì)前不久美國(guó)商務(wù)部工業(yè)與安全局(BIS)發(fā)布公告,將復(fù)旦微等23家中國(guó)實(shí)體列入實(shí)體清單。而從此次的回應(yīng)可以看到,中國(guó)企業(yè)已經(jīng)越來越能挺直自己的腰桿,而這背后,是中
![的頭像]() 發(fā)表于
發(fā)表于 09-16 08:51
?7924次閱讀
)作為設(shè)備的“能量心臟”,其性能直接影響著整個(gè)系統(tǒng)的表現(xiàn)。今天,我們就來深入探討一款專為2AA數(shù)碼攝像系統(tǒng)打造的高效6通道PMIC——MAX8858。它由MAXIM公司推出,以其卓越的性能和豐富的功能,為數(shù)碼攝像設(shè)備帶來了全新的
![的頭像]() 發(fā)表于
發(fā)表于 02-05 16:35
?282次閱讀
? 近日,北京神州普惠科技股份有限公司(以下簡(jiǎn)稱"神州普惠")宣布完成新一輪戰(zhàn)略融資,投資方為北京市先進(jìn)制造和智能裝備產(chǎn)業(yè)投資基金。此次合作被視為首都推進(jìn)智能制造與海洋科技產(chǎn)業(yè)升級(jí)的重要舉措,標(biāo)志著
![的頭像]() 發(fā)表于
發(fā)表于 01-27 18:20
?1065次閱讀

行業(yè)芯事行業(yè)資訊
電子發(fā)燒友網(wǎng)官方
發(fā)布于 :2026年01月09日 11:17:13
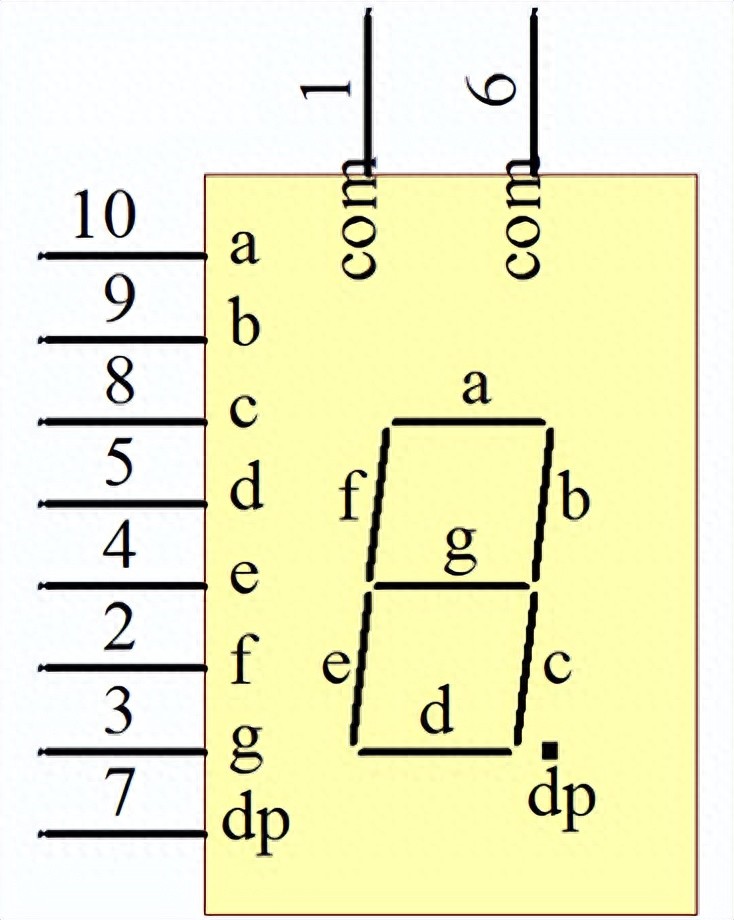
5.3 數(shù)碼管的學(xué)習(xí) LED小燈是一種簡(jiǎn)單的LED,只能通過亮和滅來表達(dá)簡(jiǎn)單的信息。這節(jié)課學(xué)習(xí)一種能表達(dá)更復(fù)雜信息的器件——LED數(shù)碼管。 5.3.1 數(shù)碼管的基本介紹 先提供一張數(shù)碼
![的頭像]() 發(fā)表于
發(fā)表于 12-02 15:57
?678次閱讀
10月30日至31日,由軟通動(dòng)力、中財(cái)協(xié)、華為技術(shù)聯(lián)合主辦,金篆信科、亞馬遜科技、合肥神州數(shù)碼、中建材信息技術(shù)、《中國(guó)總會(huì)計(jì)師》雜志社作為支持單位的“2025財(cái)資行業(yè)發(fā)展年會(huì)”在珠海成功舉辦。
![的頭像]() 發(fā)表于
發(fā)表于 11-06 14:28
?733次閱讀
電子發(fā)燒友網(wǎng)綜合報(bào)道 此前,有媒體消息稱,榮耀前CEO趙明已低調(diào)加入智界團(tuán)隊(duì)。如果消息為真,將意味著趙明重新回歸華為系。并且消息顯示, 此變動(dòng)可能與智界品牌獨(dú)立運(yùn)營(yíng)后的戰(zhàn)略轉(zhuǎn)型相關(guān),旨在復(fù)制其在
![的頭像]() 發(fā)表于
發(fā)表于 08-13 07:41
?3285次閱讀
/* 包含必要的頭文件 */
#include \"project.h\" // PSoC Creator生成的項(xiàng)目頭文件
#include <stdio.h>// 標(biāo)準(zhǔn)輸入輸出,用于sprintf等函數(shù)
#include <stdint.h>// 標(biāo)準(zhǔn)整數(shù)類型定義
#include <string.h>// 字符串操作函數(shù)
/* 指令幀頭定義 */
#define CMD_HEADER_10x42 // 指令幀第一個(gè)特征字節(jié)
#define CMD_HEADER_20x4D // 指令幀第二個(gè)特征字節(jié)
#define CMD_STANDBY_CTRL0xF4 // 待機(jī)控制指令碼
#define STANDBY_CMD_LEN7 // 待機(jī)指令總長(zhǎng)度(字節(jié)數(shù))
/* 系統(tǒng)參數(shù)配置 */
#define STANDBY_PACKET_SIZE 24 // 預(yù)期的待機(jī)響應(yīng)數(shù)據(jù)包大小
#define CMD_RETRY_INTERVAL 220 // 指令重試間隔時(shí)間(毫秒)
#define STANDBY_TIMEOUT 3000// 等待待機(jī)確認(rèn)的超時(shí)時(shí)間(毫秒)
#define MAX_RETRY_COUNT 15// 最大重試次數(shù)
/* 系統(tǒng)時(shí)間變量(毫秒計(jì)時(shí))*/
volatile uint32_t systemtime = 0; // 使用volatile防止編譯器優(yōu)化
/* 待機(jī)控制狀態(tài)結(jié)構(gòu)體 */
typedef struct {
volatile uint8_t standbyCmdSent;// 1=已發(fā)送待機(jī)指令
volatile uint8_t standbyConfirmed;// 1=收到待機(jī)確認(rèn)
volatile uint8_t retryCount;// 當(dāng)前重試次數(shù)計(jì)數(shù)
uint32_t lastStandbyCmdTime;// 最后一次發(fā)送指令的時(shí)間戳
} STANDBY_CTRL;
/* 全局待機(jī)控制狀態(tài)實(shí)例 */
STANDBY_CTRL standbyCtrl;
/* 待機(jī)指令數(shù)據(jù)包(固定格式)*/
const uint8_t standbyCmd[STANDBY_CMD_LEN] = {
CMD_HEADER_1, // 幀頭字節(jié)1
CMD_HEADER_2, // 幀頭字節(jié)2
CMD_STANDBY_CTRL,// 指令碼(待機(jī)控制)
0x00,// 數(shù)據(jù)高字節(jié)(00=待機(jī))
0x00,// 數(shù)據(jù)低字節(jié)
0x01,// 校驗(yàn)字節(jié)1(固定值)
0x83 }; // 校驗(yàn)字節(jié)2(校驗(yàn)和)
/* 發(fā)送待機(jī)指令函數(shù) /
void SendStandbyCommand(void) {
/ 通過UART發(fā)送指令數(shù)據(jù) */
PM_UART_PutArray(standbyCmd, STANDBY_CMD_LEN);
/* 更新發(fā)送狀態(tài) */
standbyCtrl.standbyCmdSent = 1; // 設(shè)置已發(fā)送標(biāo)志
standbyCtrl.lastStandbyCmdTime = systemtime; // 記錄發(fā)送時(shí)間
standbyCtrl.retryCount++; // 增加重試計(jì)數(shù)器
/* 打印調(diào)試信息 */
UART_PutString(\"CMD[\");// 輸出指令前綴
char info[10];// 臨時(shí)緩沖區(qū)
sprintf(info, \"%d/%d]: \", // 格式化重試信息
standbyCtrl.retryCount,
MAX_RETRY_COUNT);
UART_PutString(info);// 輸出重試次數(shù)
/* 打印完整指令內(nèi)容(十六進(jìn)制) */
for (uint8_t i = 0; i < STANDBY_CMD_LEN; i++) {
char hex[4]; // 臨時(shí)存儲(chǔ)十六進(jìn)制字符串
sprintf(hex, \"%02X \", standbyCmd[i]);// 格式化字節(jié)為十六進(jìn)制
UART_PutString(hex); // 輸出字節(jié)
}
UART_PutString(\"\\\\n\"); // 換行
}
/* 進(jìn)入待機(jī)模式流程控制 /
void EnterStandbyMode(void) {
/ 重置所有狀態(tài)標(biāo)志 */
standbyCtrl.standbyCmdSent = 0;// 清除發(fā)送標(biāo)志
standbyCtrl.standbyConfirmed = 0; // 清除確認(rèn)標(biāo)志
standbyCtrl.retryCount = 0; // 重置重試計(jì)數(shù)器
/* 發(fā)送第一條待機(jī)指令 */
SendStandbyCommand();
}
/* 系統(tǒng)滴答定時(shí)器中斷回調(diào)函數(shù) */
void SysTickISRCallback(void) {
systemtime++;// 每毫秒遞增系統(tǒng)時(shí)間計(jì)數(shù)器
}
/* UART接收中斷服務(wù)程序 /
CY_ISR(UART_Sensor_Rx_Isr) {
/ 讀取接收到的數(shù)據(jù)字節(jié) */
uint8_t rxData = PM_UART_ReadRxData();
/* 簡(jiǎn)化處理:僅檢測(cè)響應(yīng)幀頭0x42 */
if(rxData == CMD_HEADER_1) {
standbyCtrl.standbyConfirmed = 1; // 設(shè)置確認(rèn)標(biāo)志
UART_PutString(\"ACK received\\\\n\");// 打印確認(rèn)信息
}
}
/* 主程序入口 /
int main(void) {
/ 硬件初始化 */
CyGlobalIntEnable;// 開啟全局中斷
UART_Start(); // 初始化調(diào)試UART
PM_UART_Start(); // 初始化傳感器UART
/* 中斷配置 */
PM_UART_SetRxInterruptMode(PM_UART_RX_STS_FIFO_NOTEMPTY); // 設(shè)置接收中斷模式
PM_ISR_StartEx(UART_Sensor_Rx_Isr);// 注冊(cè)UART中斷服務(wù)程序
/* 系統(tǒng)時(shí)間初始化 */
CySysTickStart();// 啟動(dòng)系統(tǒng)滴答定時(shí)器
CySysTickSetCallback(0, SysTickISRCallback); // 注冊(cè)定時(shí)器回調(diào)
/* 打印啟動(dòng)信息 */
UART_PutString(\"System Ready - Max Retry=\"); // 輸出前綴
char maxRetry[3];// 臨時(shí)緩沖區(qū)
sprintf(maxRetry, \"%d\", MAX_RETRY_COUNT); // 格式化最大重試次數(shù)
UART_PutString(maxRetry); // 輸出次數(shù)
UART_PutString(\"\\\\n\");// 換行
/* 開始待機(jī)流程 */
EnterStandbyMode(); // 首次進(jìn)入待機(jī)模式
/* 主循環(huán) */
for(;;) {
/* 檢查指令已發(fā)送但未確認(rèn)的情況 */
if(standbyCtrl.standbyCmdSent && !standbyCtrl.standbyConfirmed) {
/* 檢測(cè)是否超時(shí) */
if((systemtime - standbyCtrl.lastStandbyCmdTime) > STANDBY_TIMEOUT) {
/* 判斷是否達(dá)到最大重試次數(shù) */
if(standbyCtrl.retryCount < MAX_RETRY_COUNT) {
/* 未達(dá)最大次數(shù),繼續(xù)重試 */
UART_PutString(\"Timeout - \"); // 打印超時(shí)信息
SendStandbyCommand();// 重發(fā)指令
} else {
/* 已達(dá)最大重試次數(shù) */
UART_PutString(\"Max retry reached. \"); // 打印錯(cuò)誤信息
UART_PutString(\"Last try delay:\");// 打印延遲信息
char delay[10];// 臨時(shí)緩沖區(qū)
sprintf(delay,\"%lums\\\\n\",// 格式化延遲時(shí)間
systemtime - standbyCtrl.lastStandbyCmdTime);
UART_PutString(delay); // 輸出延遲時(shí)間
/* 重置狀態(tài),5秒后重新嘗試 */
standbyCtrl.standbyCmdSent = 0;// 清除發(fā)送標(biāo)志
CyDelay(5000); // 延時(shí)5秒
EnterStandbyMode();// 重新開始流程
}
}
}
/* 檢查是否收到確認(rèn) */
if(standbyCtrl.standbyConfirmed) {
/* 打印成功信息 */
UART_PutString(\"Standby confirmed. Total tries:\");
char tries[4];// 臨時(shí)緩沖區(qū)
sprintf(tries, \"%d\\\\n\", standbyCtrl.retryCount); // 格式化嘗試次數(shù)
UART_PutString(tries); // 輸出次數(shù)
/* 待機(jī)確認(rèn)后的永久循環(huán) */
while(1) {
CyDelay(1000); // 可在此處添加低功耗處理
}
}
/* 主循環(huán)延遲(降低CPU占用率) */
CyDelay(100);
}
}*附件:PTQS1005A-N 多合一傳感器中文規(guī)格書 V1.0.pdf
發(fā)表于 07-29 10:54
美國(guó)政府可能對(duì)中國(guó)臺(tái)灣地區(qū)生產(chǎn)芯片征收關(guān)稅的風(fēng)險(xiǎn)。然而,臺(tái)積電在回應(yīng) Tom's Hardware 詢問時(shí)明確表示,其在美國(guó)亞利桑那州的重大投資計(jì)劃,不會(huì)影響其在日本和德國(guó)的芯片制造工廠計(jì)劃。 臺(tái)積電發(fā)言人強(qiáng)調(diào),公司不對(duì)市場(chǎng)傳聞發(fā)表評(píng)論,其全球
![的頭像]() 發(fā)表于
發(fā)表于 07-08 11:29
?868次閱讀
電子發(fā)燒友網(wǎng)綜合報(bào)道 6月8日,比亞迪集團(tuán)品牌及公關(guān)處總經(jīng)理李云飛在微博發(fā)文回應(yīng)“常壓油箱”“車圈恒大”兩大爭(zhēng)議問題。 ? 關(guān)于“常壓油箱”,李云飛稱,中國(guó)PHEV技術(shù)及標(biāo)準(zhǔn)走在世界前列,這與早期
![的頭像]() 發(fā)表于
發(fā)表于 06-10 00:11
?4645次閱讀

近日,比亞迪與神州租車在深圳比亞迪全球總部舉行戰(zhàn)略合作簽約儀式。比亞迪集團(tuán)董事長(zhǎng)兼總裁王傳福、神州租車董事長(zhǎng)于洪飛攜雙方管理團(tuán)隊(duì)共同出席,比亞迪集團(tuán)執(zhí)行副總裁兼乘用車首席運(yùn)營(yíng)官何志奇、比亞迪對(duì)公
![的頭像]() 發(fā)表于
發(fā)表于 05-22 16:36
?801次閱讀
? 2025年5月8日,Apollo與中國(guó)最大的租車平臺(tái)神州租車在北京舉行戰(zhàn)略簽約儀式,并宣布正式達(dá)成深度合作。雙方將聯(lián)合推出全球首個(gè)自動(dòng)駕駛汽車租賃服務(wù),依托技術(shù)創(chuàng)新與場(chǎng)景應(yīng)用,為廣大用戶提供普惠
![的頭像]() 發(fā)表于
發(fā)表于 05-08 17:31
?901次閱讀
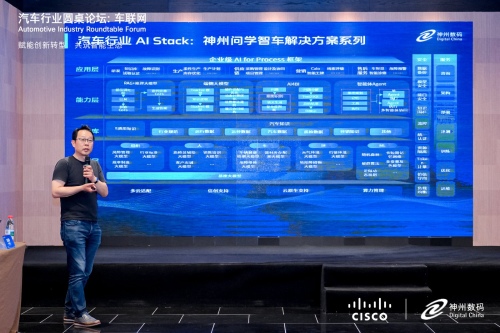
汽車產(chǎn)業(yè)智能化轉(zhuǎn)型路徑。 神州數(shù)碼汽車BG CTO劉黎在開幕致辭中透露,2023年以來,通過資源整合與戰(zhàn)略并購(gòu),神州數(shù)碼在汽車行業(yè)持續(xù)發(fā)力。近期與思科車聯(lián)網(wǎng)部門達(dá)成的深度合作更具里程碑意義。雙方將聚焦車聯(lián)網(wǎng)場(chǎng)景創(chuàng)新,共建“技術(shù)底
![的頭像]() 發(fā)表于
發(fā)表于 04-28 10:03
?609次閱讀
美國(guó)總統(tǒng)特朗普的“對(duì)等關(guān)稅”對(duì)半導(dǎo)體影響有多大?
我們看看一些上市企業(yè)是怎么回復(fù)的。 多家上市企業(yè)相繼發(fā)布公告,從美國(guó)出口占比、全球供應(yīng)鏈布局、客戶結(jié)構(gòu)等維度
回應(yīng)關(guān)稅政策的影響,并表示因?qū)γ乐苯映隹?/div>
![的頭像]() 發(fā)表于
發(fā)表于 04-22 15:59
?950次閱讀
電子發(fā)燒友網(wǎng)報(bào)道(文/梁浩斌) 近日有消息稱,安森美有意收購(gòu)傳感器巨頭Allegro,并已經(jīng)聘請(qǐng)專業(yè)顧問團(tuán)隊(duì)推進(jìn)對(duì)Allegro的收購(gòu)進(jìn)程。 ? 針對(duì)該傳聞,Allegro方面向電子發(fā)燒友網(wǎng)回
![的頭像]() 發(fā)表于
發(fā)表于 03-06 09:16
?2086次閱讀
") 神州數(shù)碼回應(yīng)神州數(shù)碼將參與收購(gòu)榮耀:傳聞,我們不回應(yīng)
神州數(shù)碼回應(yīng)神州數(shù)碼將參與收購(gòu)榮耀:傳聞,我們不回應(yīng)





 工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
評(píng)論